test
4
0 0 0 1
0 1 1 0
1 1 1 1
0 0 0 0
1 1 4 3
4
0 0 0 1
0 1 1 0
1 1 1 1
0 0 0 0
1 4 2 4
3
0 1 1
0 0 1
1 0 0
1 1 3 3
dfs解法
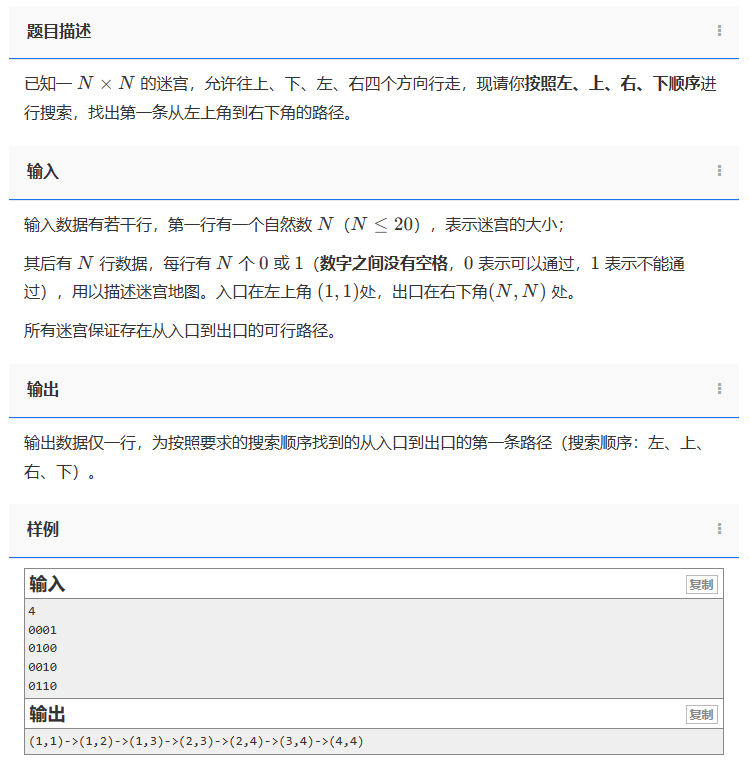
一.什么是dfs
刚开始学习解这类题目的时候,这是让我十分困惑的一个点。
搜索dfs出来的多是图的遍历、二叉树的遍历相关内容,花了挺大精力理解这些文章,对解这道题确实是有很大帮助。但是我想记录一下,单纯从这道题目出发的思考过程。
现在有这样一个迷宫,尝试一下从左下角到右上角,留意自己走过的路径。

人脑可以快速构图判断一条路行不行,计算机是一格格走的。
现在添加一些规则,你必须严格按照规则来走
- 从起点出发后,按照方向上左下右的顺序探索,能进则进。

3. 除了回退时,已经访问过的格子不得再访问。


剩下的就是利用代码去实现这一过程。
代码会涉及到结构体、栈等,不了解的同学请查阅些资料吧(也可以用纯数组的方式实现,数组表示节点,实现栈等,个人感觉这么做没那么直观。学了工具就是拿来用的O(∩_∩)O)。栈改用队列、数组也可以,用什么实现的不是特别重要,感受深搜思路。
二.核心思路
- 地图用二维数组表示,可走的为0,障碍物为1。
- 探索格子四个方向(利用当下坐标加上方向增量计算下一格坐标)。
- 走过的格子得标记,需要一个等大小的数组,探索过的格子置1,防止重复访问。
- 记录路径,无路可走时要回退的,建一个栈(回退回撤的功能大多利用栈实现)。
1.地图的表示、输入
这些内容不多说了,重点讨论dfs()函数的实现。
为了方便压栈搞个结构体,把yx坐标一起压进去。
#include<iostream>
#include<stack>
using namespace std;
// 方向增量,分别为yx
int dr[4][2] = {{-1,0},{0,-1},{1,0},{0,1}};// 上下左右
struct Pyx { // 结构体用于存储坐标
int y;
int x;
};
string dfs(Pyx start,Pyx end,int (&map)[100][100],int n) {
cout<<"冲";
}
int main() {
int n = 0;// 地图大小
cin>>n;
int map[100][100] = {0};// 地图
for(int i = 0; i<n; i++) {// 输入要测试的地图
for(int j = 0; j<n; j++) {
cin>>map[i][j];
}
}
int ha,la,hb,lb;// A和B坐标
cin>>ha>>la>>hb>>lb;
// 由题目推出左上角坐标是(1,1)实际(0,0) ,修正
Pyx start,end;
start.y = ha-1;
start.x = la-1;
end.y = hb-1;
end.x = lb-1;
cout<<dfs(start,end,map,n);
return 0;
}
我们先按照核心思路把该弄的东西弄弄(弄啥嘞)
string dfs(Pyx start,Pyx end,int (&map)[100][100],int n) {
bool visited[100][100] = {false};// 用于标记地图上的点是否访问过
visited[start.y][start.x] = true;// 将起点标记为已访问
stack<Pyx> path;// 声明一个栈用来储存路径
path.push(start);// 起点入栈
Pyx pyx_current = start;// 创建节点储存当下节点坐标,开始时在起点
}
2.搜索四个方向
接下来我们要去访问当下位置四个方向上是否有可行进的格子,
有可走的格子就拿来和终点比较一下。
string dfs(Pyx start,Pyx end,int (&map)[100][100],int n) {
bool visited[100][100] = {false};// 用于标记地图上的点是否访问过
visited[start.y][start.x] = true;// 将起点标记为已访问
stack<Pyx> path;// 声明一个栈用来储存路径
path.push(start);// 起点入栈
Pyx pyx_current = start;// 创建节点储存当下节点坐标,开始时在起点
//有四个方向
for(int i = 0; i<4; i++) {
// 计算下一步坐标
int next_y = pyx_current.y+dr[i][0];
int next_x = pyx_current.x+dr[i][1];
// 前四个条件约束边界,第五个条件查看不是障碍物,第六个条件判断没有访问过
if(next_y>=0 && next_y<n && next_x>=0 && next_x<n &&
map[next_y][next_x] == 0 && !visited[next_y][next_x]) {
if(next_y == end.y && next_x == end.x) {// 每发现一个可访问的点,和终点对比
return "YES";
}
Pyx pyx_next = {next_y,next_x};// 创建节点储存下一步坐标
path.push(pyx_next);// 将节点存入栈
visited[next_y][next_x] = true;// 入栈了标记为已访问
pyx_current = pyx_next;// 去到下个格子
}
}
}
实际上,我们找到下一个能走的格子,就立马过去了。
pyx_current = pyx_next;// 去到下个格子
break;// 跳出for循环。
用一个大循环不断重复这一动作。(停止条件可以后面再思考)
while(1){
//有四个方向
for(int i = 0; i<4; i++) {
// 计算下一步坐标
int next_y = pyx_current.y+dr[i][0];
int next_x = pyx_current.x+dr[i][1];
// 前四个条件约束边界,第五个条件查看不是障碍物,第六个条件判断没有访问过
if(next_y>=0 && next_y<n && next_x>=0 && next_x<n &&
map[next_y][next_x] == 0 && !visited[next_y][next_x]) {
if(next_y == end.y && next_x == end.x) {// 每发现一个可访问的点,和终点对比
return "YES";
}
Pyx pyx_next = {next_y,next_x};// 创建节点储存下一步坐标
path.push(pyx_next);// 将节点存入栈
visited[next_y][next_x] = true;// 入栈了标记为已访问
pyx_current = pyx_next;// 去到下个格子
break;// 跳出for循环
}
}
}
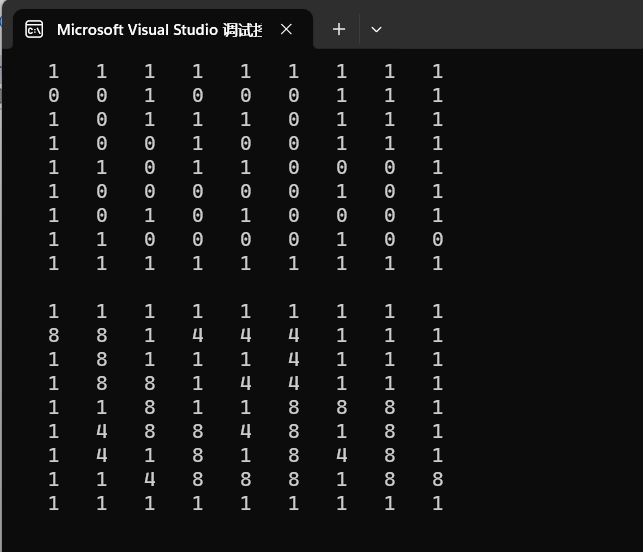
自己捋一捋程序,目前只能走到图片这里,接下来要思考回退的事情
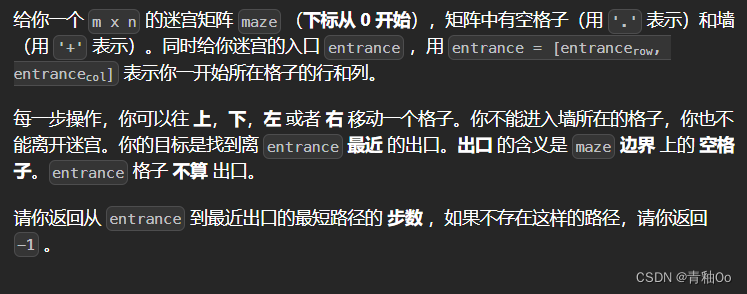
3.什么时候开始回退呢?
走到无路可走时。
我们设置一个布偶量has_unvisited 来记录是否有可访问点,默认为没有,所以每次循环开始要设为false。
存在可访问点时设为真(即满足for循环里的if语句)。
不存在可访问点则回退上一格(从栈里弹出当前点)
while(1){
bool has_unvisited = false; // 用来标记是否还有未访问的节点,循环开始重置
pyx_current = path.top();// 回退到上一格子
//有四个方向
for(int i = 0; i<4; i++) {
// 计算下一步坐标
int next_y = pyx_current.y+dr[i][0];
int next_x = pyx_current.x+dr[i][1];
// 前四个条件约束边界,第五个条件查看不是障碍物,第六个条件判断没有访问过
if(next_y>=0 && next_y<n && next_x>=0 && next_x<n &&
map[next_y][next_x] == 0 && !visited[next_y][next_x]) {
has_unvisited = true;// 存在可访问的格子
if(next_y == end.y && next_x == end.x) {// 每发现一个可访问的点,和终点对比
return "YES";
}
Pyx pyx_next = {next_y,next_x};// 创建节点储存下一步坐标
path.push(pyx_next);// 将节点存入栈
visited[next_y][next_x] = true;// 入栈了标记为已访问
pyx_current = pyx_next;// 去到下个格子
break;// 跳出for循环
}
}
if(!has_unvisited) { // 存在可访问节点就不弹栈
path.pop();// 弹出当下节点
}
}
}
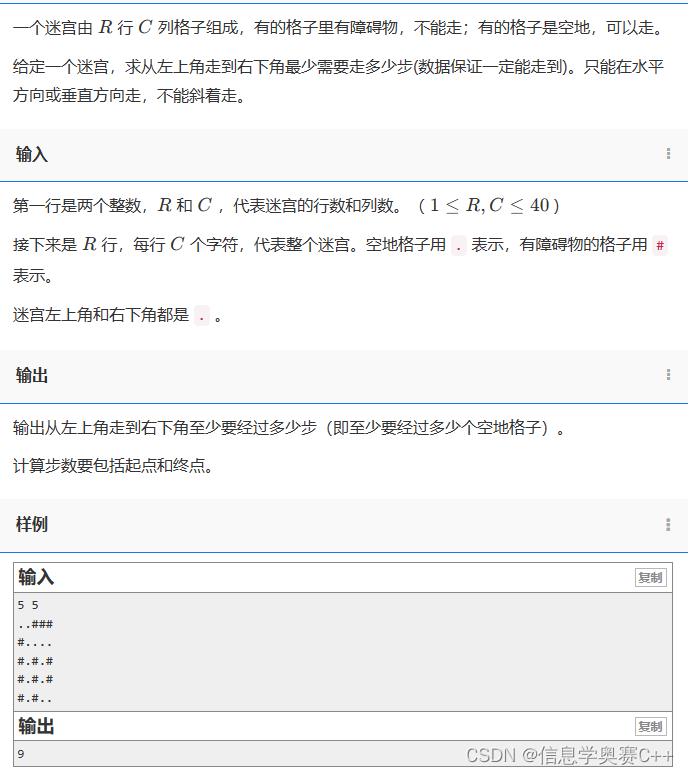
4.程序什么时候终止
当栈里啥也没有,表明我们把可走的路全部走了一遍,并且退回到了起点!
while(!path.empty()){// 栈空了, 还没找到终点说明走不到。
while结束了还没找到终点则返回NO
while(!path.empty()){// 栈空了, 还没找到终点说明走不到。
bool has_unvisited = false; // 用来标记是否还有未访问的节点,循环开始重置
pyx_current = path.top();// 回退到上一格子
//有四个方向
for(int i = 0; i<4; i++) {
// 计算下一步坐标
int next_y = pyx_current.y+dr[i][0];
int next_x = pyx_current.x+dr[i][1];
// 前四个条件约束边界,第五个条件查看不是障碍物,第六个条件判断没有访问过
if(next_y>=0 && next_y<n && next_x>=0 && next_x<n &&
map[next_y][next_x] == 0 && !visited[next_y][next_x]) {
has_unvisited = true;// 存在可访问的格子
if(next_y == end.y && next_x == end.x) {// 每发现一个可访问的点,和终点对比
return "YES";
}
Pyx pyx_next = {next_y,next_x};// 创建节点储存下一步坐标
path.push(pyx_next);// 将节点存入栈
visited[next_y][next_x] = true;// 入栈了标记为已访问
pyx_current = pyx_next;// 去到下个格子
break;// 跳出for循环
}
}
if(!has_unvisited) { // 存在可访问节点就不弹栈
path.pop();//否则弹出当前格子
}
}
return "NO";
}
这就结束了吗?
当时检查提交了很多遍都是错的

自己把所有解的情况都列了一种出来,发现当起点就在障碍物上,输出结果也是YES。
因为起点没经过检测,直接压栈的!!!
所以一开始直接对起点检测,起点在障碍物上后面的程序都不用执行。(出题人的弯弯肠子)
string dfs(Pyx start,Pyx end,int (&map)[100][100],int n) {
if(map[start.y][start.x]) {//检测起点
return "NO";
}
bool visited[100][100] = {false};// 用于标记地图上的点是否访问过
visited[start.y][start.x] = true;// 将起点标记为已访问
stack<Pyx> path;// 声明一个栈用来储存路径
path.push(start);// 起点入栈
Pyx pyx_current = start;// 创建节点储存当下节点坐标,开始时在起点
while(!path.empty()){// 栈空了, 还没找到终点说明走不到。
三.全部代码
#include<iostream>
#include<stack>
using namespace std;
// 方向增量,分别为yx
int dr[4][2] = {{-1,0},{0,-1},{1,0},{0,1}};// 上下左右
struct Pyx { // 结构体用于存储坐标
int y;
int x;
};
string dfs(Pyx start,Pyx end,int (&map)[100][100],int n) {
if(map[start.y][start.x]) {
return "NO";
}
bool visited[100][100] = {false};// 用于标记地图上的点是否访问过
visited[start.y][start.x] = true;// 将起点标记为已访问
stack<Pyx> path;// 声明一个栈用来储存路径
path.push(start);// 起点入栈
Pyx pyx_current = start;// 创建节点储存当下节点坐标,开始时在起点
while(!path.empty()){// 栈空了, 还没找到终点说明走不到。
bool has_unvisited = false; // 用来标记是否还有未访问的节点,循环开始重置
pyx_current = path.top();// 回退到上一格子
//有四个方向
for(int i = 0; i<4; i++) {
// 计算下一步坐标
int next_y = pyx_current.y+dr[i][0];
int next_x = pyx_current.x+dr[i][1];
// 前四个条件约束边界,第五个条件查看不是障碍物,第六个条件判断没有访问过
if(next_y>=0 && next_y<n && next_x>=0 && next_x<n &&
map[next_y][next_x] == 0 && !visited[next_y][next_x]) {
has_unvisited = true;// 存在可访问的格子
if(next_y == end.y && next_x == end.x) {// 每发现一个可访问的点,和终点对比
return "YES";
}
Pyx pyx_next = {next_y,next_x};// 创建节点储存下一步坐标
path.push(pyx_next);// 将节点存入栈
visited[next_y][next_x] = true;// 入栈了标记为已访问
pyx_current = pyx_next;// 去到下个格子
break;// 跳出for循环
}
}
if(!has_unvisited) { // 存在可访问节点就不弹栈
path.pop();//否则弹出当前格子
}
}
return "NO";
}
int main() {
int n = 0;// 地图大小
cin>>n;
int map[100][100] = {0};// 地图
for(int i = 0; i<n; i++) {// 输入要测试的地图
for(int j = 0; j<n; j++) {
cin>>map[i][j];
}
}
int ha,la,hb,lb;// A和B坐标
cin>>ha>>la>>hb>>lb;
// 由题目推出左上角坐标是(1,1)实际(0,0) ,修正
Pyx start,end;
start.y = ha-1;
start.x = la-1;
end.y = hb-1;
end.x = lb-1;
cout<<dfs(start,end,map,n);
return 0;
}
























![[Spring] Spring配置文件](https://i-blog.csdnimg.cn/direct/f0c5b1e3dbe044769fc9fc5c38accbae.jpeg#pic_center)