锁相环 vivado FPGA
- 开发
- 13
-
原理
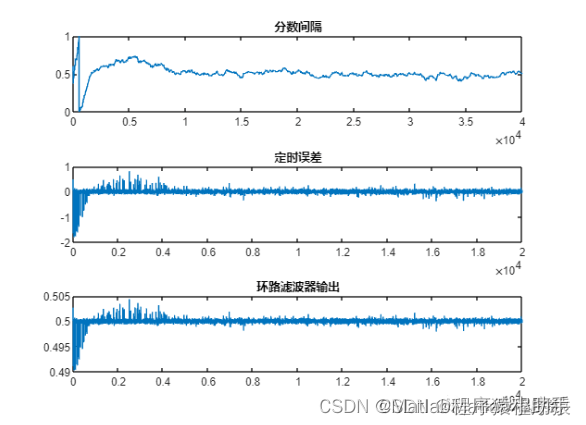
- 同步状态/跟踪状态:相位差在2kπ附近,频率差为0
- 到达上述状态的过程称为捕获过程
- 锁相环的捕获带:delta w的最大值,大于这个值的话就不能捕获
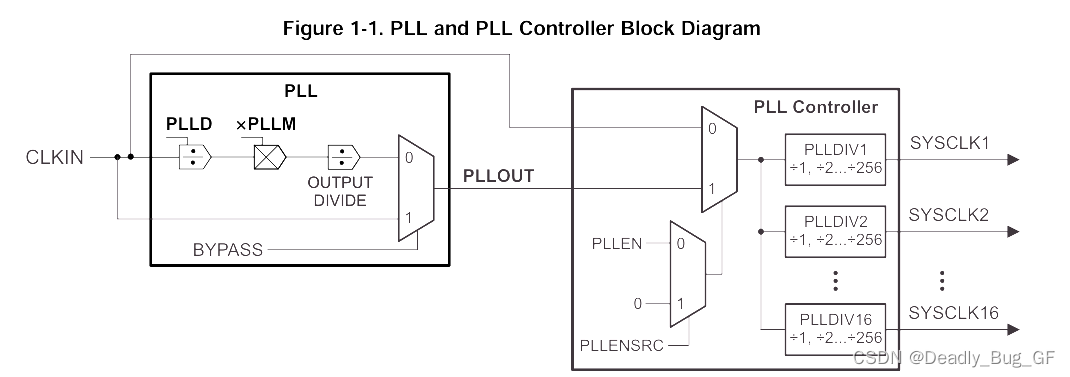
- 鉴相器(PD-phase discriminator):相乘加LPF,相差提取到电压函数sin的相位中
- LP:对PD产生的电压函数进行变换
- VCO:将电压信息转移到瞬时频率上,与电压是一次函数关系(但是输入电压范围有限,才保持线性)
- VCO反馈给PD:PD要的是相位,也就是瞬时频率的积分。最终VCO反馈的是LP输出电压的积分,也就是输入相差的积分。(PID中I的意思)
- 准同步,相差较小时(+30度时,误差5%以内),LP输出值正比于相差
原文地址:https://blog.csdn.net/bwhaxx/article/details/140594351
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1815292702913335296.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!