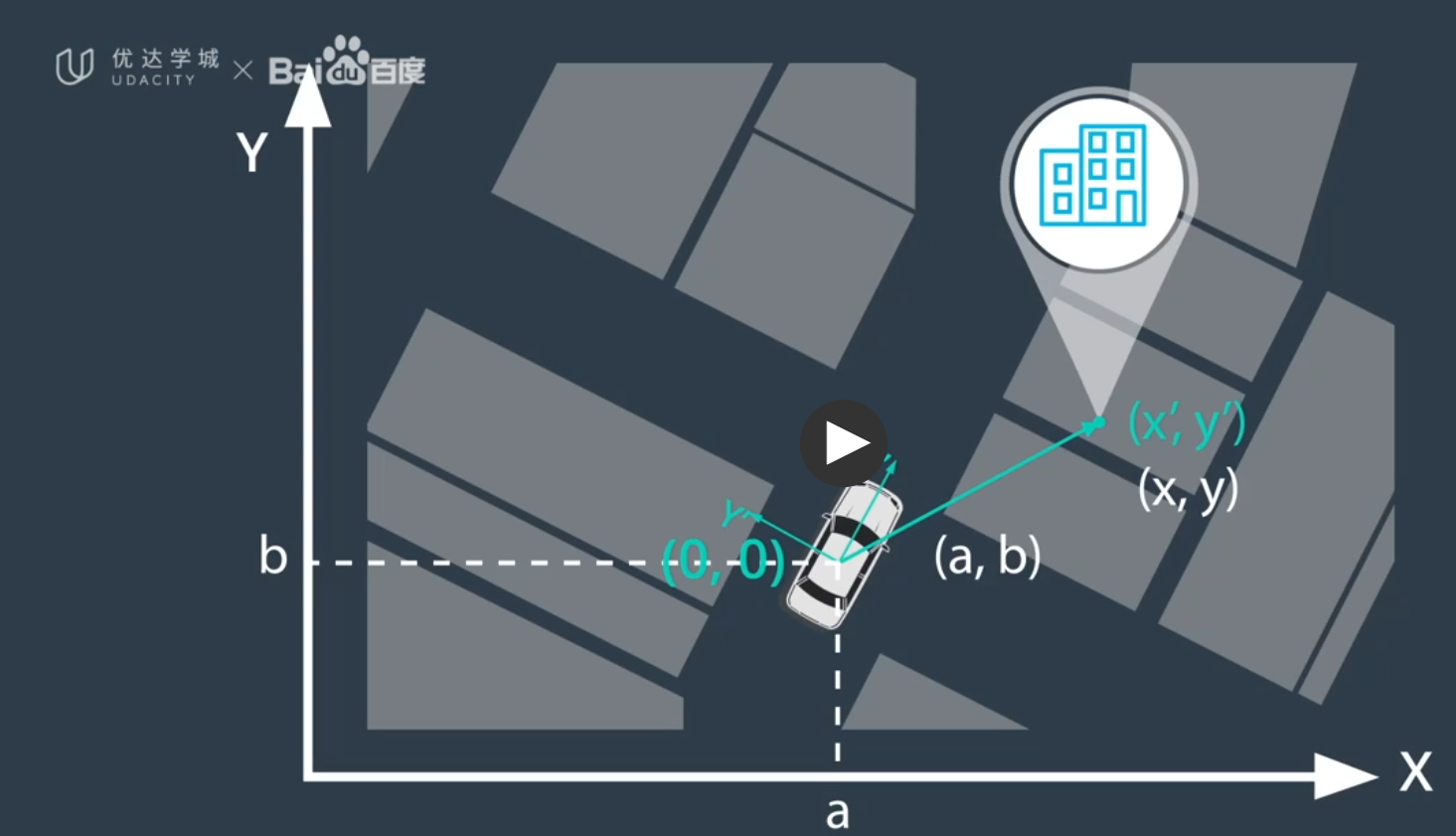
自动驾驶中的定位是实现车辆自主行驶的关键环节,它为车辆的决策和控制提供了精确的空间位置和姿态信息。
定位的核心目标是在各种复杂的环境和工况下,为自动驾驶汽车实时、准确地确定其在三维空间中的绝对位置和相对姿态,包括车辆的经度、纬度、高度、航向角、俯仰角和横滚角等参数。
以下对常见的定位方法和技术进行更深入的阐述:
1. 全球导航卫星系统(GNSS)
- 原理:通过接收来自多颗卫星的信号,计算信号传播的时间差来确定车辆与卫星之间的距离,进而通过三角测量原理计算出车辆的位置。
- 优点:能够在开阔区域提供较准确的全球定位信息。
- 局限性:
- 信号易受遮挡:在高楼林立的城市峡谷、隧道、地下停车场等环境中,卫星信号可能被建筑物、山体等阻挡,导致接收不到足够的卫星信号,从而影响定位精度甚至无法定位。
- 多路径效应:卫星信号在传播过程中可能经过建筑物、水面等反射,产生多个路径的信号叠加,导致测量误差。
- 精度限制:民用级的 GNSS 定位精度通常在数米到十几米之间,对于自动驾驶的高精度要求往往不够。
2. 惯性测量单元(IMU)
- 组成:通常由加速度计和陀螺仪组成。加速度计测量车辆在三个轴向上的加速度,陀螺仪测量车辆的角速度。
- 工作原理:通过对加速度进行二次积分可以得到车辆的位移,通过对角速度进行积分可以得到车辆的姿态变化。
- 优点:能够在短时间内提供高精度的相对位置和姿态变化信息,不受外界环境干扰。
- 局限性:
- 误差累积:由于测量误差的存在,随着时间的推移,积分计算会导致误差不断累积,从而使定位结果逐渐偏离真实值。
- 初始校准要求高:IMU 在使用前需要进行精确的初始校准,否则会引入较大的偏差。
3. 激光雷达
- 原理:向周围环境发射激光束,并测量激光束从发射到被物体反射回来的时间,从而计算出物体与激光雷达的距离。通过快速旋转扫描,可以构建出周围环境的三维点云地图。
- 定位方法:
- 地图匹配:将实时获取的点云与预先构建的高精度激光雷达地图进行匹配,通过寻找最佳匹配位置来确定车辆的位置。
- 特征提取与匹配:从点云中提取独特的特征,如建筑物边缘、道路标线等,并与地图中的特征进行匹配。
- 优点:能够提供高精度的距离测量和环境感知,对环境光照变化不敏感。
- 局限性:
- 成本高:高质量的激光雷达设备价格昂贵。
- 数据量大:生成的点云数据量巨大,处理和计算需求高。
4. 摄像头
- 原理:利用光学成像原理获取车辆周围的视觉信息。
- 定位方式:
- 基于地标识别:通过识别道路上的特定地标、交通标志、建筑物等,并与地图中的信息进行匹配来确定位置。
- 视觉里程计:通过分析连续图像帧之间的差异,估计车辆的运动和位置变化。
- 优点:成本相对较低,能够提供丰富的语义信息。
- 局限性:
- 受光照和天气影响大:在夜间、强光、雨雪等恶劣条件下,图像质量会下降,影响定位效果。
- 计算复杂度高:图像的处理和分析需要大量的计算资源。
5. 高精度地图
- 内容:包含了详细的道路几何形状、车道线位置、坡度、曲率、交通标志、建筑物轮廓等信息,精度通常达到厘米级。
- 作用:
- 提供先验信息:为车辆的定位提供参考框架,减少定位的不确定性。
- 辅助传感器校准:帮助校准其他传感器的测量结果。
- 构建与更新:
- 构建:通过专业的测绘设备和技术进行采集和制作。
- 更新:由于道路环境可能发生变化,需要定期或实时更新地图信息。
6. 车联网(V2X)
- 概念:车辆与其他车辆(V2V)、基础设施(V2I)、行人(V2P)等通过无线通信进行信息交互。
- 定位应用:
- 车辆之间可以共享位置信息,提高彼此的定位精度。
- 路侧单元可以提供车辆的位置修正信息。
- 通信技术:如专用短程通信(DSRC)、蜂窝车联网(C-V2X)等。
为了实现更可靠和精确的定位,通常采用多传感器融合的策略:
1. 数据融合层次:
- 传感器级融合:在传感器层面直接对原始数据进行融合。
- 特征级融合:对各个传感器提取的特征进行融合。
- 决策级融合:将各个传感器的定位结果进行融合和决策。
2. 融合算法:
- 卡尔曼滤波及其扩展算法:如扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)等,能够有效地处理线性和非线性系统的状态估计和数据融合问题。
- 粒子滤波:适用于处理非高斯分布的系统。
- 基于图优化的方法:将定位问题构建为一个图模型,通过优化图的结构来求解最优的定位结果。
定位技术的性能直接影响着自动驾驶汽车的安全性、舒适性和效率。不断提高定位的精度、可靠性和实时性,以及降低成本和应对复杂环境的挑战,是自动驾驶领域持续研究和发展的重要方向
























![[trick]使用生成器打破嵌套循环](https://i-blog.csdnimg.cn/direct/7a867cf378a54fd1a5ed34a018ba2b14.jpeg)