引言
在计算机视觉领域,目标检测(Object Detection)是一个基础且重要的研究方向。它不仅需要识别图像中的物体类别,还需要准确地确定物体所在的位置。随着深度学习技术的迅猛发展,目标检测算法也经历了从传统方法到深度学习方法的一次次飞跃。无论是在学术研究中,还是在实际应用中,目标检测技术都展示了其强大的潜力。
目标检测的广泛应用
目标检测技术在日常生活和工业应用中扮演着不可或缺的角色。以下是一些典型的应用场景:
- 自动驾驶:目标检测算法用于识别道路上的行人、车辆、交通标志等,确保车辆安全行驶。
- 视频监控:通过目标检测技术,可以实时监控并识别视频中的异常行为,提高公共安全。
- 医疗影像分析:在医学影像中,目标检测用于识别和定位病灶,如肿瘤检测。
- 智能零售:在智能零售系统中,目标检测技术帮助实现商品识别、库存管理和顾客行为分析。
目标检测的挑战
尽管目标检测技术取得了显著进展,但它仍然面临许多挑战:
- 多尺度目标检测:图像中的目标可能具有不同的尺度,如何在大范围尺度内准确检测目标是一个难点。
- 遮挡和重叠:图像中的目标可能出现部分遮挡或重叠,导致检测难度增加。
- 实时性要求:在实际应用中,特别是自动驾驶和视频监控等领域,目标检测算法需要具备高实时性。
- 多类别检测:在复杂的场景中,目标检测算法需要同时检测并分类多个类别的目标。
文章结构
为了帮助读者系统地了解目标检测技术,本文将从以下几个方面展开:
- 目标检测算法的基本原理:介绍目标检测的基本概念和工作流程。
- 经典目标检测算法:详细阐述 R-CNN 和 YOLO 等经典算法的原理和特点。
- 最新研究进展:探讨基于 Transformer 的目标检测方法、多尺度特征融合、自监督学习等前沿研究成果。
- 实际应用案例:展示目标检测技术在实际应用中的具体案例和效果。
- 未来发展方向:展望目标检测技术的未来发展趋势和研究方向。
二、目标检测算法的基本原理
目标检测(Object Detection)是计算机视觉中的一个核心任务,其目标是识别图像中的物体并确定其位置。一个完整的目标检测系统通常涉及多个步骤,从图像预处理到后处理,本文将逐步解析这些步骤,帮助读者理解目标检测算法的基本原理。
1. 输入图像的预处理
在目标检测任务中,输入图像的预处理是一个关键步骤。预处理的目的是为了标准化输入,使得后续的特征提取更加鲁棒。常见的预处理操作包括:
- 图像缩放:将输入图像调整到固定尺寸,以适应模型的输入要求。
- 颜色归一化:对图像像素值进行归一化处理,例如减去均值、除以标准差等,以消除光照变化的影响。
- 数据增强:通过随机裁剪、旋转、翻转等操作增加数据的多样性,提升模型的泛化能力。
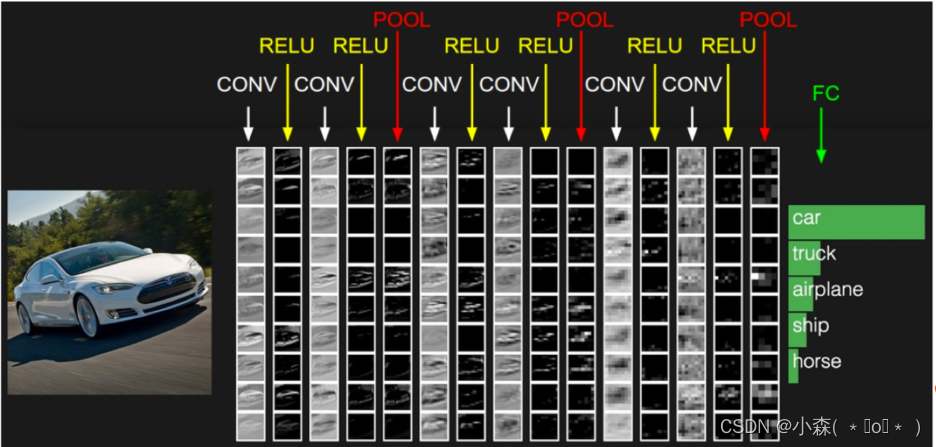
2. 特征提取
特征提取是目标检测中最为关键的一步,通常采用卷积神经网络(CNN)来提取图像的高层特征。经典的特征提取网络包括 VGG、ResNet、Inception 等,这些网络通过多层卷积操作提取出图像的语义特征。特征提取网络的输出通常是一个特征图(Feature Map),它包含了输入图像的空间信息和语义信息。
3. 区域建议
在传统的目标检测方法中,区域建议(Region Proposal)是生成可能包含目标的候选区域的过程。以下是几种常见的区域建议方法:
- 选择性搜索(Selective Search):通过图像的颜色、纹理等信息生成候选区域。
- 区域建议网络(RPN):Faster R-CNN 引入的区域建议网络,通过滑动窗口在特征图上生成锚框(Anchor Boxes),并对这些锚框进行分类和回归。
区域建议的目的是减少后续分类和定位的计算量,提高检测效率。
4. 目标分类和定位
对于每个候选区域,目标检测算法需要同时完成分类和定位的任务:
- 分类:判断候选区域中是否包含目标,并预测目标的类别。
- 定位:回归目标的边界框(Bounding Box),确定目标的精确位置。
分类和定位通常通过全连接层或卷积层完成,输出分别是类别概率和边界框坐标。
5. 后处理
目标检测的后处理步骤主要包括非极大值抑制(Non-Maximum Suppression, NMS)和边界框修正:
- 非极大值抑制(NMS):在检测结果中,可能会出现多个高度重叠的边界框。NMS 通过保留得分最高的边界框,并抑制其他重叠度较高的边界框,从而去除冗余的检测结果。
- 边界框修正:对边界框进行微调,以提高目标定位的准确性。
通过这些后处理步骤,可以得到最终的目标检测结果。
6. 损失函数
在目标检测任务中,损失函数的设计至关重要。一个典型的目标检测损失函数通常包括两部分:
- 分类损失:用于衡量预测类别与真实类别之间的差异,常用的有交叉熵损失(Cross-Entropy Loss)。
- 定位损失:用于衡量预测边界框与真实边界框之间的差异,常用的有平滑 L1 损失(Smooth L1 Loss)。
总损失是分类损失和定位损失的加权和,通过最小化总损失来优化模型参数。
综上所述,目标检测算法的基本原理涵盖了从输入图像预处理、特征提取、区域建议、目标分类和定位到后处理的整个流程。
三、经典目标检测算法
在目标检测的发展历史中,出现了许多经典的算法,这些算法在不同的阶段推动了整个领域的进步。以下将详细介绍几种具有代表性的经典目标检测算法,包括 R-CNN 系列、YOLO 系列和 SSD 等。
1. R-CNN 系列
1.1 R-CNN (Regions with CNN features)
R-CNN 是由 Ross Girshick 等人在 2014 年提出的,它是将卷积神经网络(CNN)应用于目标检测的开创性工作。R-CNN 的主要步骤如下:
- 区域建议:使用选择性搜索算法生成大约 2000 个候选区域(Region Proposals)。
- 特征提取:将每个候选区域调整到固定尺寸并输入卷积神经网络(如 AlexNet)提取特征。
- 分类和定位:使用支持向量机(SVM)对提取的特征进行分类,并使用线性回归调整边界框。
尽管 R-CNN 在当时取得了优异的检测效果,但其计算效率较低,因为每个候选区域都需要单独通过 CNN 进行特征提取。
1.2 Fast R-CNN
为了解决 R-CNN 的效率问题,Ross Girshick 在 2015 年提出了 Fast R-CNN。Fast R-CNN 的改进主要体现在以下几个方面:
- 共享特征提取:整个图像通过 CNN 网络一次性提取特征图,而不是对每个候选区域分别提取特征。
- ROI Pooling:通过区域兴趣池化(ROI Pooling)将特征图上的每个候选区域映射到固定尺寸。
- 多任务损失:同时进行分类和边界框回归,使用一个联合损失函数进行优化。
这些改进使得 Fast R-CNN 在保持高精度的同时,大幅提升了检测速度。
1.3 Faster R-CNN
进一步提升检测效率,Shaoqing Ren 等人在 2015 年提出了 Faster R-CNN。Faster R-CNN 的主要创新在于引入了区域建议网络(RPN),实现了候选区域的高效生成:
- 区域建议网络(RPN):在共享特征图上滑动一个小窗口生成锚框(Anchor Boxes),并对每个锚框进行目标和非目标的二分类。
- 端到端训练:RPN 和 Fast R-CNN 共享同一个特征提取网络,可以进行端到端的联合训练。
Faster R-CNN 通过 RPN 的引入,实现了更快的检测速度和更高的精度,成为当时最先进的目标检测算法之一。
2. YOLO 系列
2.1 YOLO (You Only Look Once)
YOLO 由 Joseph Redmon 等人在 2016 年提出,YOLO 是一类单阶段目标检测方法,旨在通过一次前向传播实现目标的分类和定位。YOLO 的主要特点包括:
- 全局特征:将输入图像划分为 SxS 的网格,每个网格直接预测目标的类别和边界框。
- 端到端训练:整个网络可以端到端训练,计算效率高。
YOLO 的速度非常快,但在小目标和重叠目标的检测上存在一定的局限性。
2.2 YOLOv2 和 YOLOv3
为了提高检测精度,YOLO 系列进行了多次改进:
- YOLOv2:引入了锚框(Anchor Boxes)、Batch Normalization、以及更深的网络结构(Darknet-19),显著提升了检测精度。
- YOLOv3:进一步改进了网络结构(Darknet-53),并采用多尺度预测,提升了对小目标的检测能力。
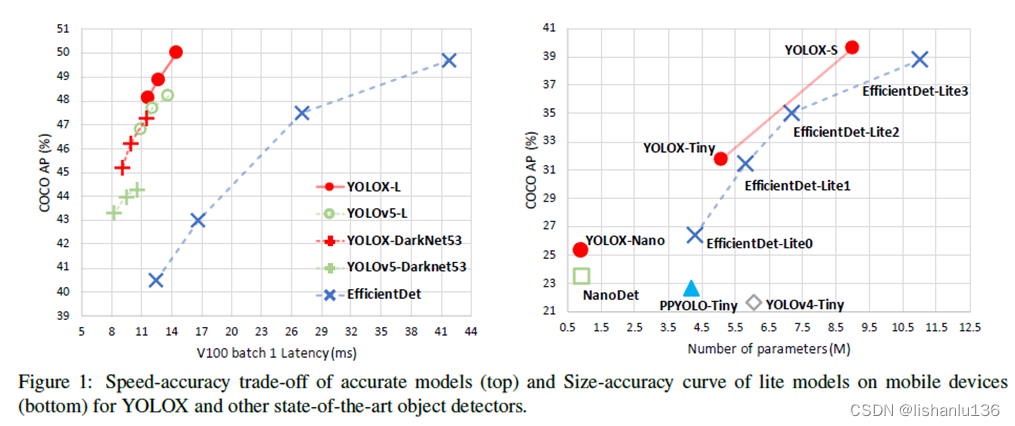
2.3 YOLOv4 和 YOLOv5
最新的 YOLO 版本进一步优化了网络架构和训练方法:
- YOLOv4:引入了 CSPDarknet53 作为主干网络,并采用了多种改进技术如 Mosaic 数据增强、CIOU 损失等。
- YOLOv5:进一步精简和优化了模型结构,提高了检测速度和精度,并在实际应用中得到了广泛使用。
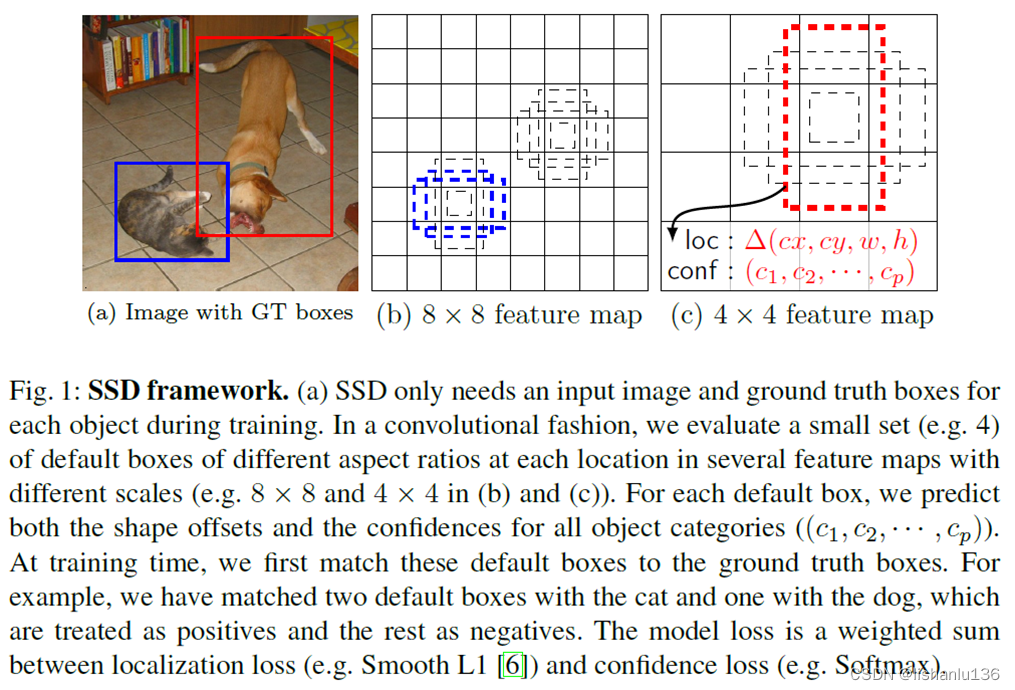
3. SSD (Single Shot MultiBox Detector)
SSD 由 Wei Liu 等人在 2016 年提出,是另一类单阶段目标检测算法。SSD 的主要思路是:
- 多尺度特征图:在不同尺度的特征图上进行目标检测,能够同时兼顾大目标和小目标。
- 默认框(Default Boxes):在每个特征图位置预测多个默认框,并对这些框进行分类和回归。
SSD 结合了 YOLO 的速度和 Faster R-CNN 的精度,在保持高效的同时,具有较好的检测效果。
总结
经典目标检测算法在不同的阶段推动了目标检测技术的发展。R-CNN 系列通过逐步优化,实现了从高精度到高效率的飞跃;YOLO 系列则通过全新的设计理念,实现了实时目标检测;SSD 则结合了多尺度特征图,兼顾了检测速度和精度。通过对这些经典算法的学习和理解,我们可以更好地掌握目标检测的核心技术,为进一步研究和应用奠定基础。
四、最新的研究进展
随着深度学习的不断发展,目标检测算法在效率和精度上都取得了显著的进步。近年来,基于 Transformer 的方法、多尺度特征融合技术和自监督学习方法在目标检测领域引起了广泛关注。以下将详细介绍这些最新研究进展。
1. 基于 Transformer 的方法
1.1 DETR (DEtection TRansformer)
DETR 由 Facebook AI Research 团队在 2020 年提出,是首个将 Transformer 引入目标检测的模型。DETR 的核心思想是利用 Transformer 的自注意力机制进行目标检测,从而简化了传统目标检测框架中的许多步骤。
- 端到端检测:DETR 通过 Transformer 编码器和解码器直接从图像特征中生成目标检测结果,不需要额外的区域建议网络和后处理步骤。
- 自注意力机制:利用自注意力机制捕捉图像中的长距离依赖关系,增强特征表达能力。
DETR 在检测精度上表现优异,但其训练过程较慢,且对小目标的检测效果有待提升。
1.2 Deformable DETR
为了改进 DETR 的不足,提出了 Deformable DETR。该模型引入了可变形卷积(Deformable Convolution),以提高对小目标和复杂场景的检测效果:
- 可变形注意力机制:通过引入可变形卷积,灵活调整注意力的焦点,提高对小目标和复杂场景的检测能力。
- 加速收敛:通过多尺度特征和局部注意力机制,加速了模型的训练过程。
Deformable DETR 在保持高精度的同时,显著提升了训练速度和对小目标的检测效果。
2. 多尺度特征融合
多尺度特征融合技术在目标检测中的应用越来越广泛,以下是几种典型的方法:
2.1 FPN (Feature Pyramid Network)
FPN 由 Tsung-Yi Lin 等人在 2017 年提出,是一种经典的多尺度特征融合方法。FPN 的主要特点是:
- 金字塔结构:通过构建不同尺度的特征图金字塔,捕捉不同尺度的目标信息。
- 自顶向下路径和横向连接:通过自顶向下路径和横向连接,融合不同尺度的特征,提高检测精度。
FPN 被广泛应用于许多目标检测模型中,如 Faster R-CNN 和 Mask R-CNN,大幅提升了检测性能。
2.2 PANet (Path Aggregation Network)
PANet 是一种增强特征金字塔网络,通过路径聚合进一步提升多尺度特征的表达能力:
- 路径聚合:通过增加自底向上的路径,进一步融合不同尺度的特征。
- 完全连接的 FPN:通过增加更多的横向连接,增强特征的传递和融合能力。
PANet 在多尺度目标检测任务中表现出色,特别是在处理小目标和复杂背景时具有显著优势。
3. 自监督学习
自监督学习方法在目标检测中的应用逐渐增多,通过利用大量未标注的数据进行预训练,可以显著提升模型的泛化能力和检测性能。
3.1 MoCo (Momentum Contrast)
MoCo 是一种基于对比学习的自监督学习方法,其核心思想是通过构建一个动态字典,将查询特征与键特征进行对比,从而实现自监督学习:
- 动态字典:构建一个包含键特征的动态字典,通过动量更新机制维持字典的一致性和多样性。
- 对比学习:通过对比查询特征和键特征,学习图像的特征表示。
MoCo 在自监督学习中表现出色,通过预训练可以显著提升目标检测模型的性能。
3.2 SimCLR (Simple Framework for Contrastive Learning of Visual Representations)
SimCLR 是另一种基于对比学习的自监督学习方法,其主要特点是:
- 数据增强:通过多种数据增强方法生成不同视角的图像对。
- 对比损失:通过对比不同视角的图像对,学习图像的特征表示。
SimCLR 简化了自监督学习的框架,通过预训练可以提高目标检测模型的泛化能力和检测精度。
总结
最新的研究进展展示了目标检测领域的巨大潜力。基于 Transformer 的方法如 DETR 和 Deformable DETR,简化了传统检测流程并提升了检测性能;多尺度特征融合技术如 FPN 和 PANet,增强了模型对不同尺度目标的检测能力;自监督学习方法如 MoCo 和 SimCLR,通过利用未标注数据进行预训练,显著提升了模型的泛化能力。
通过对这些最新方法的学习和理解,研究人员可以进一步推动目标检测技术的发展,为更多实际应用提供强有力的技术支持。
五、结语
目标检测作为计算机视觉领域的重要任务,已经取得了显著的进展。本文从基本原理、经典算法到最新研究进展,详细介绍了目标检测算法的发展历程。未来,随着深度学习技术的不断进步,目标检测算法必将在更多实际场景中发挥重要作用。
希望这篇文章能够帮助读者更好地理解目标检测算法,并激发对这一领域的研究兴趣。如果您有任何问题或建议,欢迎在评论区留言讨论。
参考文献
- Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014). Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 580-587).
- Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster R-CNN: Towards real-time object detection with region proposal networks. Advances in neural information processing systems, 28.
- Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016). You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 779-788).
- Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov, A., & Zagoruyko, S. (2020). End-to-end object detection with transformers. In European conference on computer vision (pp. 213-229). Springer, Cham.






























![[Armbian] 部署Docker版Home Assistent,安装HACS并连接米家设备](https://i-blog.csdnimg.cn/direct/94c227e5d505400ebed94a6e63709e79.png#pic_center)





