总体内容
7.1 串行通信概述
7.2 MCS-51的串口控制器
7.3 串行工作方式0及其应用
7.4 串行工作方式1及其应用
7.5 串行工作方式2及其应用
7.6 串行工作方式3及其应用
7.1 串行通信概述
1、并行通信和串行通信(数据通信的两种常用形式)
(1)并行方式-------数据的各位同事发送或同时接收

并行传送特点:传送速度快,但因需要多跟传输线,故一般只在近距离通信中使用。
(2)串行通信方式-----数据的各位依次逐位发送和接收。

串行传送特点:传输速度慢,但因需要较少传输线,故适合远距离通信。
按照数据流向,串行通信具有三种传输形式:

实际应用中,尽管多数串行通信接口电路具有全双工功能,但仍以半双工为主(简单实用)
2、波特率
在串行通信的数据是按位进行传送的 ,数据传输速率用波特率指标衡量。
![]() 波特率:每秒发送二进制数码的位数,即bps (位/秒)
波特率:每秒发送二进制数码的位数,即bps (位/秒)
国际推荐波特率:110、300、600、1200、2400、4800、9600、19200、38400波特等。
串行通信的收发双方必须采用相同的波特率。
3、异步通信和同步通信(串行通信基本通信方式)
(1)异步通信
——以字符为单位组成字符帧进行的数据传送。

一帧数据由起始位、数据位、[可编程位]和停止位构成

起始位:位于数据帧开头,占1位,始终为低电平,用于向接收设备表示发送端开始发送1帧数据。
数据位:要传输的数据信息,可以是字符或数据,一般为5~8位,由低位到高位依次传送。
可编程位:位于数据位之后,占1位,用于发送数据的校验,或传送多机串行通信的联络信息。
停止位:位于数据位末尾,占1位,始终为高电平,用于向接收端表示1帧数据已发送完毕。

异步通信特点:
对收发双方的时钟精度要求较低(收发双方不同步时,能依靠在每帧开始时的不断对齐,自行纠正偏差);
传送速度较低(每个字节都要建立一次同步)。
(2)同步通信
——数据以块为单位进行的数据传送

在发一组数据时,只在开始用若干个同步字符作为双方的号令,然后连续发送整组数据。
同步通信特点:
传输效率高(以数据块为单位连续传送,数据结构紧凑);
对通信硬件要求高(要求双方有准确的时钟)。
7.2 MCS-51的串口控制器
7.2.1串行口内部结构
51内部有1个可编程的全双工串行通信接口,可作为通用异步接收/发送器(UART),也可作为同步移位寄存器。

结构组成:SBUF发 +SBUF收 +发送控制器 +接收控制器 +波特率发生器 +SCON +RXD(P3.0)+TXD(P3.1)

数据缓冲器SBUF:

发送控制器:

接收控制器:
定时器T1:

P3.0/RXD和P3.1/TXD引脚:
用于串行信号或时钟信号的传入或传出。

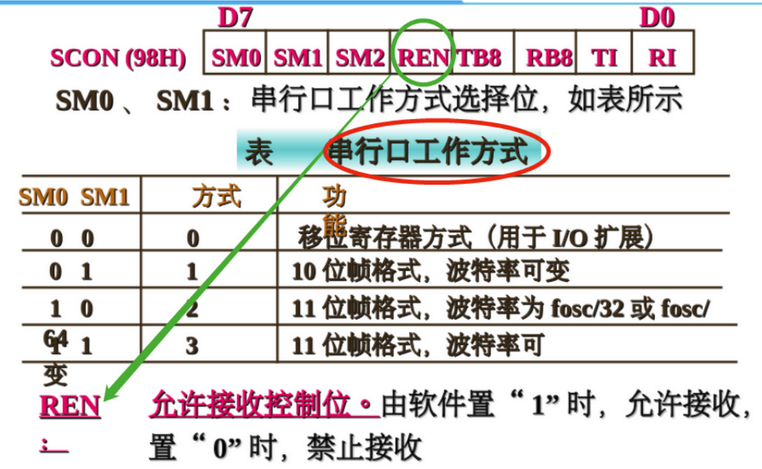
7.2.2串行口控制寄存器


通信时钟波特率原理

T1溢出脉冲有两种分频路径:16分频或32分频;
SMOD是决定分频路径的逻辑开关。

波特率取决于T1的定时参数(a,n,fosc)和SMOD参数。
7.3 串行工作方式0及其应用
串行通信的4种工作方式

方式0——8位同步移位寄存器方式

——I/O口数量不足时,可通过串口方式0进行扩展,但需要相应的扩展芯片配合。

实例1 方式0应用
利用74LS164扩展并行输出口,并实现LED由上向下循环

74LS164——8位串入并出移位寄存器





电路接线:
数据输入端1(2)→RXD
时钟端8→ TXD
输出端Q0~Q7 →D1~D8
清零端9——Vcc或I/O口


③ 74LS164倒序校正
欲使164输出1111 1110B,SBUF发应为0111 1111B (0x7f )
欲使D1~D8由上向下点亮,SBUF发应右移1位且最高位置1
→ (SBUF发 >> 1) | 1000 0000B ; 与0x80逻辑或
实例1源程序


7.4 串行工作方式1及其应用
方式1—— 10位数据异步通讯方式




实例2 方式1应用
发送数据,乙机接收数据,两机
fosc为11.0592MHz,波特率
为2.4k,串口方式1。


② 程序流程图
对通信的实时性要求不高,故双机都可采用软件查询TI和RI的做法

实例2源程序(发送)

实例2源程序(接收)





7.5 串行工作方式2及其应用



奇偶校验原理:
例如,发送数据为0x45(0100 0101B),其奇偶校验值P=1(奇数个1),将P→TB8,发送时可连同数据0x45一起发出。接收端可自动将其可编程位放入RB8中。

只要将待测数据送入Acc即可由硬件求出奇偶校验值(使P赋值),再与RB8进行比较便可判断收发过程是否有误。
实例3 方式2应用
采用实例2的双机通信电路,晶振11.0592MHz,串口方式2 ,通
信时钟为0.3456Mb/s,两机分别显示收发数值,且进行奇偶校验

程序分析:
① 对于晶振11.0592MHz,0.3456Mb/s的通信时钟相当于1/32晶振频率→PCON= 0x80(波特率加倍);串口方式2,允许接收,不是多机通信→SCON = 0x90。

② 将数据存入累加器Acc,可获得奇偶标志位P值。发送时校验位写入TB8输出,接收时校验位从RB8读取。
实例3源程序(发送)

实例3源程序(接收)


7.6 串行工作方式3及其应用
方式3——11位数据异步通信方式


多机通信做法:
关键:
主机第1次发出的信息要能被所有的从机响应,而第2次的信息只能被n#从机所响应——多机通信控制位SM2对串行中断请求的管理功能。

实例4 方式3应用
下图电路中,K1、K2为发送激发键,每按1次,主机向相应从机顺序发送1位0~F间的字符,发送字符可用虚拟终端TERMINAL观察。命中从机收到地址帧后使发光二极管状态反转1次,收到数据帧后在其共阳型数码管上显示出来。系统晶振频率为11.0592MHz。要求通信采用串口方式3,波特率9600bps,发送编程采用查询法,接收编程采用中断法。



实例4源程序(主机)

实例4源程序(子机1#)

实例4源程序(子机2#)