1.什么是TCP
TCP(Transmission Control Protocol,传输控制协议)是一种面向连接的、可靠的、基于字节流的通信协议,属于互联网协议族(TCP/IP)的一部分。TCP 提供可靠的、顺序的、无差错的数据传输服务,是许多重要网络应用(如 HTTP、FTP、SMTP)的基础。
主要特点
面向连接:
- TCP 是面向连接的协议,在传输数据之前,必须先建立连接。连接的建立通过“三次握手”进行,确保通信双方都准备好了进行数据传输。
可靠传输:
- TCP 提供可靠的数据传输服务,确保数据包按序到达且无丢失、无重复、无差错。通过确认(ACK)和重传机制实现可靠性。
流量控制:
- TCP 采用流量控制机制,通过滑动窗口协议调整发送方的发送速度,以防止接收方的缓存溢出,确保数据传输的平稳性。
拥塞控制:
- TCP 具有拥塞控制机制,能够检测网络拥塞并适当减少数据传输速率,以避免进一步加剧网络拥塞。常见的拥塞控制算法有慢启动、拥塞避免、快速重传和快速恢复等。
基于字节流:
- 用户消息通过 TCP 协议传输时,消息可能会被操作系统「分组」成多个的 TCP 报文,如果接收方的程序如果不知道「消息的边界」,是无法读出一个有效的用户消息的。并且 TCP 报文是「有序的」,当「前一个」TCP 报文没有收到的时候,即使它先收到了后面的 TCP 报文,那么也不能扔给应用层去处理,同时对「重复」的 TCP 报文会自动丢弃。
顺序保证:
- TCP 保证数据按序到达。通过序列号(Sequence Number)标识每个字节,接收方根据序列号重排序收到的数据包,确保应用程序收到的数据是按发送顺序排列的。
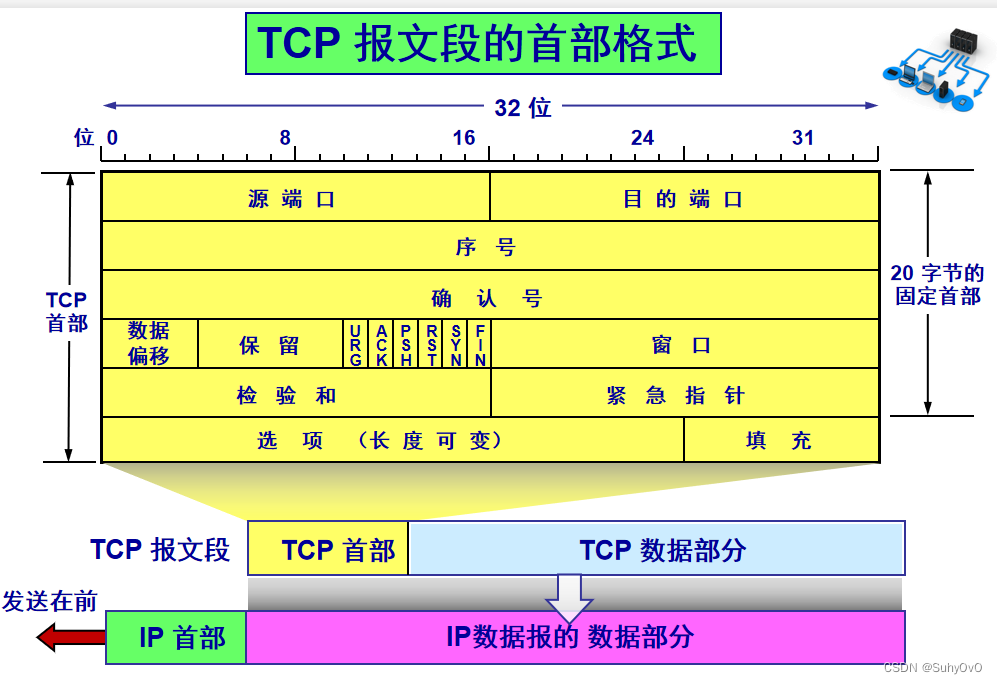
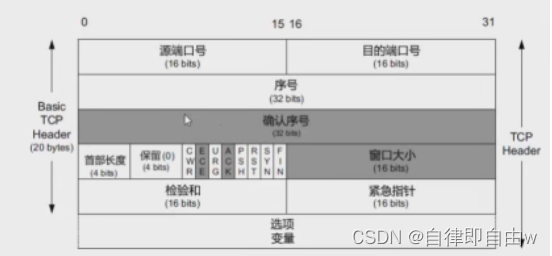
2.TCP协议头格式介绍

在Tcp协议中,比较重要的字段有:
源端口:表示发送端端口号,字段长 16 位,2个字节
目的端口:表示接收端端口号,字段长 16 位,2个字节
序号(sequence number):字段长 32 位,占4个字节,序号的范围为 [0,4284967296]。由于TCP是面向字节流的,在一个TCP连接中传送的字节流中的每一个字节都按顺序编号首部中的序号字段则是指本报文段所发送的数据的第一个字节的序号,这是随机生成的。序号是循环使用的,当序号增加到最大值时,下一个序号就又回到了0
确认序号(acknowledgement number):占32位(4字节),表示收到的下一个报文段的第一个数据字节的序号,如果确认序号为N,序号为S,则表明到序号N-S为止的所有数据字节都已经被正确地接收到了。
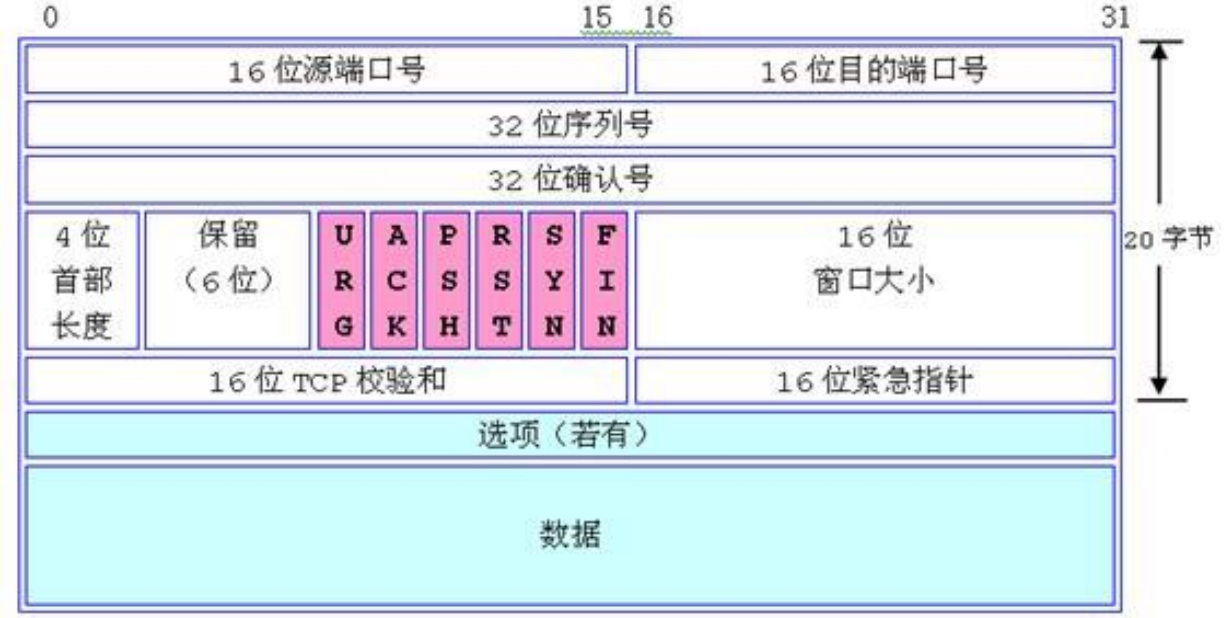
8个标志位(Flag):(标红的为重要的)
CWR:CWR 标志与后面的 ECE 标志都用于 IP 首部的 ECN 字段,ECE 标志为 1 时,则通知对方已将拥塞窗口缩小;
ECE:若其值为 1 则会通知对方,从对方到这边的网络有阻塞。在收到数据包的 IP 首部中 ECN 为 1 时将 TCP 首部中的 ECE 设为 1.;
URG:该位设为 1,表示包中有需要紧急处理的数据,对于需要紧急处理的数据,与后面的紧急指针有关;
ACK:该位设为 1,确认应答的字段有效,TCP规定除了最初建立连接时的 SYN 包之外该位必须设为 1;
PSH:该位设为 1,表示需要将收到的数据立刻传给上层应用协议,若设为 0,则先将数据进行缓存;
RST:该位设为 1,表示 TCP 连接出现异常必须强制断开连接;
SYN:用于建立连接,该位设为 1,表示希望建立连接,并在其序列号的字段进行序列号初值设定;
FIN:该位设为 1,表示今后不再有数据发送,希望断开连接。
窗口大小:该字段长 16 位,表示从确认序号所指位置开始能够接收的数据大小,TCP 不允许发送超过该窗口大小的数据。
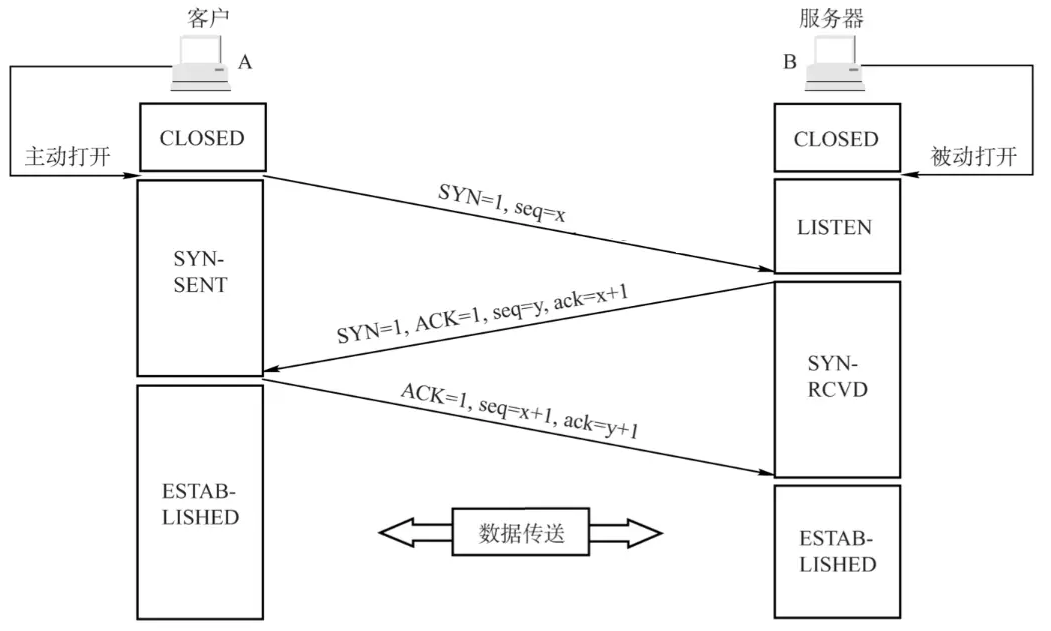
3.TCP三次握手建立连接
TCP 是面向连接的协议,所以使用 TCP 前必须先建立连接,而建立连接是通过三次握手来进行的。三次握手的过程如下图:

3.1三次握手详解
一开始,客户端和服务端都处于 CLOSE 状态。
服务器端:已经启动,并且启动了监听(被动接受连接的一端)
客户端:基于服务器端监听的IP和端口,向服务器端发起连接请求(主动发起连接的一端)
三次握手具体过程如下:
第一次握手:

- 客户端会随机初始化序列号(
client_isn),将此序列号置于 TCP 首部的「序列号」字段中,同时把SYN标志位置为1,表示SYN报文。接着把第一个 SYN 报文发送给服务端,表示向服务端发起连接,该报文不包含应用层数据,之后客户端处于SYN-SENT状态。
第二次握手:

- 服务端收到客户端的
SYN报文后,首先服务端也随机初始化自己的序列号(server_isn),将此序号填入 TCP 首部的「序列号」字段中,其次把 TCP 首部的「确认应答号」字段填入client_isn + 1, 接着把SYN和ACK标志位置为1。最后把该报文发给客户端,该报文也不包含应用层数据,之后服务端处于SYN-RCVD状态。
第三次握手:

客户端收到服务端报文后,还要向服务端回应最后一个应答报文,首先该应答报文 TCP 首部
ACK标志位置为1,其次「确认应答号」字段填入server_isn + 1,最后把报文发送给服务端,这次报文可以携带客户到服务端的数据,之后客户端处于ESTABLISHED状态。服务端收到客户端的应答报文后,也进入
ESTABLISHED状态。
从上面的过程可以发现第三次握手是可以携带数据的,前两次握手是不可以携带数据的,这也是面试常问的题。
一旦完成三次握手,双方都处于 ESTABLISHED 状态,此时连接就已建立完成,客户端和服务端就可以相互发送数据了。
4.TCP四次挥手断开连接
四次挥手是断开连接的过程,需要双向断开,关于由哪一端先断开连接是没有要求的。通信的两端如果想要断开连接就需要调用close()函数,当两端都调用了该函数,四次挥手也就完成了。
客户端和服务器断开连接 -> 单向断开
服务器和客户端断开连接 -> 单向断开
进行了两次单向断开,双向断开就完成了,每进行一次单向断开,就会完成两次挥手的动作。

- 客户端打算关闭连接,此时会发送一个 TCP 首部
FIN标志位被置为1的报文,也即FIN报文,之后客户端进入FIN_WAIT_1状态。 - 服务端收到该报文后,就向客户端发送
ACK应答报文,接着服务端进入CLOSE_WAIT状态。 - 客户端收到服务端的
ACK应答报文后,之后进入FIN_WAIT_2状态。 - 等待服务端处理完数据后,也向客户端发送
FIN报文,之后服务端进入LAST_ACK状态。 - 客户端收到服务端的
FIN报文后,回一个ACK应答报文,之后进入TIME_WAIT状态 - 服务端收到了
ACK应答报文后,就进入了CLOSE状态,至此服务端已经完成连接的关闭。 - 客户端在经过
2MSL一段时间后,自动进入CLOSE状态,至此客户端也完成连接的关闭。
你可以看到,每个方向都需要一个 FIN 和一个 ACK,因此通常被称为四次挥手。
这里一点需要注意是:主动关闭连接的,才有 TIME_WAIT 状态。