前言
一、概念
SPI(Serial Peripheral Interface一一串行外设接口)总线是Motorola公司 [2]推出的一种同步串行接口技术。SPI总线系统是一种同步串行外接口,允许MCU/MPU与各种外围设备以串行方式进行通信,数据交换。外围设备包括FLASHRAM、A/D转换器、网络控制器、MCU等。SPI是一种高速的,全双工,同步的通信总线。(来自百度百科)
关键词: 串行 高速 全双工(发送的同时可以接收)
二、硬件特性
1、线制说明
三线制:CLK时钟、 CS片选、 MOSI(此线作为输入输出线),三线是SPI的半双工通信,单根数据线可以分时发送和接收;
四线制: CLK时钟、 CS片选、 MOSI(主机输出)、MISO(主机输入),标准四线是全双工
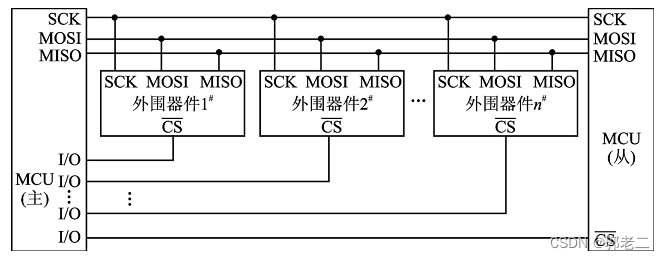
2、电气连接
标准四线
三线
3、极性/模式
spi根据极性和相位有四种模式
三、驱动软件
此说明以linux内核5.10.165, Designware SPI core controller 外设IP核为例总结
1、主要文件和作用
spi-dw-mmio.c
spi外设控制器设备树节点解析,将spi外设封装成platform设备,对platform设备设备的操作封装;
以platform的device成员,创建struct dw_spi_mmio 后,对struct dw_spi_mmio成员初始化;
解析设备树中外设寄存器 时钟等资源赋值给其中struct dw_spi dws 成员的子成员,struct dw_spi结构定义于spi-dw.h
此文件主要结构:
struct dw_spi_mmio {
struct dw_spi dws;
struct clk *clk;
struct clk *pclk;
void *priv;
struct reset_control *rstc;
};
spi-dw-core.c
对struct dw_spi 结构的操作封装,spi外设中断处理函数的处理,对struct dw_spi的成员struct spi_controller *master的初始化
此文件主要结构:
struct dw_spi {
struct spi_controller *master; //对spi外设封装表示
void __iomem *regs; //spi外设的寄存器地址
unsigned long paddr;
int irq;
u32 fifo_len; /* depth of the FIFO buffer */
u32 max_mem_freq; /* max mem-ops bus freq */
u32 max_freq; /* max bus freq supported */
u32 caps; /* DW SPI capabilities */
u32 reg_io_width; /* DR I/O width in bytes */
u16 bus_num;
u16 num_cs; /* supported slave numbers */
void (*set_cs)(struct spi_device *spi, bool enable);
/* Current message transfer state info */
void *tx;
unsigned int tx_len;
void *rx;
unsigned int rx_len;
u8 buf[SPI_BUF_SIZE];
int dma_mapped;
u8 n_bytes; /* current is a 1/2 bytes op */
irqreturn_t (*transfer_handler)(struct dw_spi *dws);
u32 current_freq; /* frequency in hz */
u32 cur_rx_sample_dly;
u32 def_rx_sample_dly_ns;
/* Custom memory operations */
struct spi_controller_mem_ops mem_ops;
/* DMA info */
struct dma_chan *txchan;
u32 txburst;
struct dma_chan *rxchan;
u32 rxburst;
u32 dma_sg_burst;
unsigned long dma_chan_busy;
dma_addr_t dma_addr; /* phy address of the Data register */
const struct dw_spi_dma_ops *dma_ops;
struct completion dma_completion;
#ifdef CONFIG_DEBUG_FS
struct dentry *debugfs;
struct debugfs_regset32 regset;
#endif
};
spidev.c
对挂载spi外设上的spi设备进行读写访问的通用驱动接口封装, 在此对于spi设备的操作也是通用的字符设备操作结构体,如下
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
spi.c
spi驱动的核心层;
对于spi外设到spi设备信息读写接口;
spi外设控制器的最终注册;
spi消息队列的管理;
spi_controller和spi_device的分配接口;
2、主要数据结构
spi外设的表示:
struct spi_controller {
struct device dev;
struct list_head list; //一个芯片不只有一个spi外设,对于一个spi外设会将此外设挂到spi外设的列表里
/* other than negative (== assign one dynamically), bus_num is fully
* board-specific. usually that simplifies to being SOC-specific.
* example: one SOC has three SPI controllers, numbered 0..2,
* and one board's schematics might show it using SPI-2. software
* would normally use bus_num=2 for that controller.
*/
s16 bus_num;
/* chipselects will be integral to many controllers; some others
* might use board-specific GPIOs.
*/
u16 num_chipselect;
//一些钩子函数的定义//
};
spi设备的表示:
struct spi_device {
struct device dev;
struct spi_controller *controller;
struct spi_controller *master; /* compatibility layer */
u32 max_speed_hz;
u8 chip_select;
u8 bits_per_word;
bool rt;
u32 mode;
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
#define SPI_TX_DUAL 0x100 /* transmit with 2 wires */
#define SPI_TX_QUAD 0x200 /* transmit with 4 wires */
#define SPI_RX_DUAL 0x400 /* receive with 2 wires */
#define SPI_RX_QUAD 0x800 /* receive with 4 wires */
#define SPI_CS_WORD 0x1000 /* toggle cs after each word */
#define SPI_TX_OCTAL 0x2000 /* transmit with 8 wires */
#define SPI_RX_OCTAL 0x4000 /* receive with 8 wires */
#define SPI_3WIRE_HIZ 0x8000 /* high impedance turnaround */
int irq;
void *controller_state;
void *controller_data;
char modalias[SPI_NAME_SIZE];
const char *driver_override;
int cs_gpio; /* LEGACY: chip select gpio */
struct gpio_desc *cs_gpiod; /* chip select gpio desc */
struct spi_delay word_delay; /* inter-word delay */
/* the statistics */
struct spi_statistics statistics;
/*
* likely need more hooks for more protocol options affecting how
* the controller talks to each chip, like:
* - memory packing (12 bit samples into low bits, others zeroed)
* - priority
* - chipselect delays
* - ...
*/
};
spi消息的表示:
struct spi_message {
struct list_head transfers;
struct spi_device *spi;
unsigned is_dma_mapped:1;
/* REVISIT: we might want a flag affecting the behavior of the
* last transfer ... allowing things like "read 16 bit length L"
* immediately followed by "read L bytes". Basically imposing
* a specific message scheduling algorithm.
*
* Some controller drivers (message-at-a-time queue processing)
* could provide that as their default scheduling algorithm. But
* others (with multi-message pipelines) could need a flag to
* tell them about such special cases.
*/
/* completion is reported through a callback */
void (*complete)(void *context);
void *context;
unsigned frame_length;
unsigned actual_length;
int status;
/* for optional use by whatever driver currently owns the
* spi_message ... between calls to spi_async and then later
* complete(), that's the spi_controller controller driver.
*/
struct list_head queue;
void *state;
/* list of spi_res reources when the spi message is processed */
struct list_head resources;
};
3、驱动初始化流程
3.1、spi外设初始化流程

3.2、下挂设备初始化流程

四、应用层
1、消息结构 struct spi_ioc_transfer
struct spi_ioc_transfer {
__u64 tx_buf;
__u64 rx_buf;
__u32 len;
__u32 speed_hz;
__u16 delay_usecs;
__u8 bits_per_word;
__u8 cs_change;
__u8 tx_nbits;
__u8 rx_nbits;
__u8 word_delay_usecs;
__u8 pad;
/* If the contents of 'struct spi_ioc_transfer' ever change
* incompatibly, then the ioctl number (currently 0) must change;
* ioctls with constant size fields get a bit more in the way of
* error checking than ones (like this) where that field varies.
*
* NOTE: struct layout is the same in 64bit and 32bit userspace.
*/
};
2、应用编程示例
打开设备描述符:
spi_fd = open(devname, O_RDWR); devname为/dev/spidev*.* ,表示第几个spi外设下的第几个设备,如/dev/spidev0.0;
初始化配置读写模式、最大速率、传输字位数:
ioctl(spi_fd, SPI_IOC_WR_MODE, mode); //mode 为 0 1 2 3 具体看控制的外部器件支持哪种模式
ioctl(spi_fd, SPI_IOC_RD_MODE, mode);
ioctl(spi_fd, SPI_IOC_WR_BITS_PER_WORD, bits); //bits 可以为 8
ioctl(spi_fd, SPI_IOC_RD_BITS_PER_WORD, bits);
ioctl(spi_fd, SPI_IOC_WR_MAX_SPEED_HZ, speed); //被控制器件支持的最大速率
ioctl(spi_fd, SPI_IOC_RD_MAX_SPEED_HZ, speed);
读外部器件数据
struct spi_ioc_transfer transfer;
uint8_t spidev_read(uint8_t addr)
{
unit8_t out[3]={0},in[3]={0};
out[0] = rd_cmd; //不同的芯片定义不同,看芯片手册具体描述
out[1] = addr; //不同的芯片定义不同
out[2] = dummy_data; //这里是0x00
transfer.tx_buf = (unsigned long)out;
transfer.rx_buf = (unsigned long)in;
transfer.len = 3;
int ret = ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer);
if (ret >= 3)
{
return in[2];
}
else
{
return 0xff; //error
}
}
向外部器件写数据
void spidev_write(uint8_t addr, uint8_t data)
{
unit8_t out[3]={0};
out[0] = wr_cmd; //不同的芯片定义不同
out[1] = addr; //不同的芯片定义不同
out[2] = data;
transfer.tx_buf = (unsigned long)out;
transfer.len = 3;
int ret = ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer);
if (ret >= 3)
{
// success
}
else
{
//error
}
}