无人机(Unmanned Aerial Vehicle, 简称UAV)技术的迅速发展推动了航模和无人机爱好者的日益增加。为了确保无人机的安全飞行和性能优化,正确的组装和调试是至关重要的。本文档将详细介绍无人机组装调试实验室的技术流程,包括机架与电机组装、飞控系统安装、遥控器绑定、电源管理、系统调试、螺旋桨安装及常见问题处理等方面。

机架与电机组装
1. 准备工作:选择合适的无人机机架、电机、电调及配套的螺丝和配件。
2. 电机安装:根据机架设计,将电机固定在机架上,确保电机轴与机架平面垂直。
3. 电调连接:将电调与电机连接,注意区分电机的转动方向和电调的对应端口。
4. 电调与电池连接:根据电调参数,选择合适的电池,并使用正确的极性连接电调和电池。
飞控系统安装
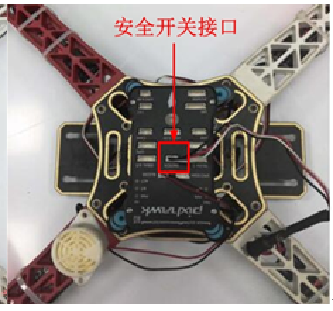
1. 飞控板安装:将飞控板固定在机架中央,确保安装稳固且不影响其他部件。
2. 传感器校准:使用飞控板配套的软件进行传感器校准,包括加速度计、陀螺仪等。
3. 接收机安装:将接收机固定在机架合适位置,确保信号接收稳定。
遥控器绑定
1. 打开遥控器和接收机电源,确保二者进入配对模式。
2. 根据遥控器和接收机的操作说明,完成遥控器和接收机的配对操作。
3. 验证绑定:通过遥控器操作,检查无人机是否能正确响应。
电源管理
1. 电池管理:选择合适的锂电池,注意电池容量、电压和放电率等参数。
2. 电池安装:将电池安装在机架上,确保电池固定牢固且不会因振动而移位。
3. 电源分配:根据各部件的电源需求,使用适当的电源分配板或电线进行电源分配。
系统调试
1. 飞行模式设置:根据实际需求,设置无人机的飞行模式,如定高、定位、自主飞行等。
2. 电机测试:在无风环境下,测试电机是否正常工作,是否有异响或震动过大现象。
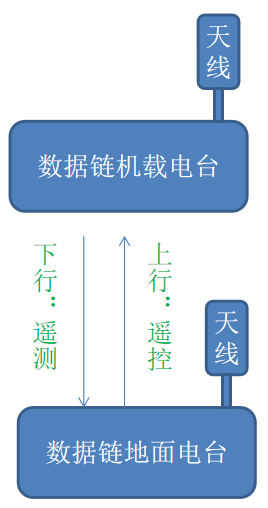
3. 遥控器信号测试:测试遥控器与无人机之间的信号传输是否稳定,是否有干扰或丢失信号现象。
4. 飞行测试:在安全环境下进行飞行测试,检查无人机的飞行性能、稳定性和操控性。

螺旋桨安装
1. 螺旋桨分类:根据无人机的旋转方向选择合适的螺旋桨,包括正反螺旋桨。
2. 螺旋桨安装:将螺旋桨固定在电机轴上,确保螺旋桨安装牢固且不会因振动而脱落。
3. 螺旋桨平衡:使用螺旋桨平衡器检查螺旋桨是否平衡,避免飞行中因螺旋桨不平衡导致的问题。
常见问题处理
1. 电机不转:检查电机与电调连接是否正确,电机是否损坏,电调是否工作正常。
2. 遥控器无响应:检查遥控器电池是否充满电,遥控器与接收机是否成功配对,信号传输是否稳定。
3. 飞行不稳定:检查螺旋桨是否安装正确,电机是否平衡,飞控系统是否校准正确。
4. 电源故障:检查电池是否损坏,电源分配是否合理,电线是否接触良好。
结语
通过本文档的介绍,相信读者对无人机组装调试技术有了更深入的了解。在实际操作中,请务必遵循相关安全规定和操作流程,确保无人机飞行的安全性和稳定性。