前言
在构建高性能和高可用性的软件系统时,多线程编程已成为一个不可或缺的技术。它允许程序执行并发操作,从而提高资源利用率和响应速度。然而,多线程编程也引入了复杂性,尤其是在线程的创建、同步和销毁方面。为了有效管理这些线程,线程池模型被广泛采用。线程池不仅有助于减少线程创建和销毁的开销,还提供了一种优雅的方式来控制并发级别和任务调度。
此外,日志系统在软件开发中扮演着重要角色,尤其是在多线程环境下,日志记录的线程安全性和性能变得尤为重要。本文将深入探讨线程封装、多线程环境下的日志系统设计,以及线程池的概念、实现和应用。
1. 线程封装
在现代软件开发中,多线程编程已成为提高应用性能的关键技术之一。C++提供了丰富的多线程支持,但直接使用底层的线程库可能会使代码变得复杂和难以管理。因此,对线程进行封装,提供更高层次的抽象,可以简化多线程编程,提高代码的可读性和可维护性。
1.1 线程封装的基本概念
线程封装通常涉及以下几个方面:
线程的创建和管理:封装线程的创建过程,提供简洁的接口来启动和停止线程。
线程的同步:提供同步机制,如互斥锁、条件变量等,以协调线程间的协作。
线程安全的数据访问:确保线程间共享数据的访问是安全的。
1.2 实现线程封装
// Thread.hpp
#ifndef __THREAD_HPP__ // 预处理指令,防止头文件被重复包含
#define __THREAD_HPP__
#include <iostream> // 标准输入输出流库
#include <string> // 字符串类模板
#include <unistd.h> // UNIX标准函数库,提供sleep等函数
#include <functional> // 函数对象和回调
#include <pthread.h> // POSIX线程库
namespace ThreadModule // 命名空间,用于封装代码
{
// 使用std::function定义一个函数类型,可以接受一个std::string参数,返回void
using func_t = std::function<void(std::string)>;
// 定义Thread类,用于封装线程的创建和管理
class Thread
{
public:
// 执行线程函数,调用成员函数_func,传入线程名称_threadname
void Excute()
{
_func(_threadname);
}
public:
// 构造函数,接受一个函数对象和线程名称,初始化成员变量
Thread(func_t func, std::string name="none-name")
: _func(func), _threadname(name), _stop(true) // 默认停止标志为true
{}
// 静态成员函数,作为线程的入口函数
static void *threadroutine(void *args)
{
Thread *self = static_cast<Thread *>(args); // 将传入的void*转换为Thread*
self->Excute(); // 调用Excute成员函数执行线程任务
return nullptr; // 线程执行完毕返回nullptr
}
// 开始线程,创建并启动线程
bool Start()
{
int n = pthread_create(&_tid, nullptr, threadroutine, this); // 创建线程
if(!n) // 如果创建成功
{
_stop = false; // 设置停止标志为false,表示线程正在运行
return true; // 返回true表示成功
}
else // 如果创建失败
{
return false; // 返回false表示失败
}
}
// 将线程与创建它的线程分离,线程将独立运行
void Detach()
{
if(!_stop) // 如果线程正在运行
{
pthread_detach(_tid); // 分离线程
}
}
// 等待线程结束
void Join()
{
if(!_stop) // 如果线程正在运行
{
pthread_join(_tid, nullptr); // 等待线程结束
}
}
// 获取线程名称
std::string name()
{
return _threadname; // 返回线程名称
}
// 停止线程
void Stop()
{
_stop = true; // 设置停止标志为true
}
// 析构函数,清理资源
~Thread()
{}
private:
pthread_t _tid; // 线程ID
std::string _threadname; // 线程名称
func_t _func; // 线程要执行的函数对象
bool _stop; // 停止标志,用于控制线程是否应该停止
};
} // namespace ThreadModule
#endif // __THREAD_HPP__
1.3 使用线程封装
#include "Thread.hpp" // 包含线程封装的头文件
// 定义一个简单的函数,它将作为线程要执行的任务
void PrintThreadName(const std::string& name) {
std::cout << "Thread " << name << " is running." << std::endl;
}
int main() {
// 创建一个线程对象,线程函数是PrintThreadName,线程名称是"TestThread"
ThreadModule::Thread myThread(PrintThreadName, "TestThread");
// 启动线程
if (myThread.Start()) {
std::cout << "Thread " << myThread.name() << " started successfully." << std::endl;
} else {
std::cerr << "Failed to start thread " << myThread.name() << "." << std::endl;
return -1; // 启动失败,退出程序
}
// 可以选择让主线程在这里做其他事情,或者直接等待线程完成
sleep(1); // 假设我们想等待1秒让线程执行
// 等待线程结束
myThread.Join();
std::cout << "Thread " << myThread.name() << " finished." << std::endl;
return 0; // 正常退出程序
}

2. 多线程环境下的日志系统设计
在软件开发过程中,日志系统是不可或缺的一部分,它帮助开发者监控程序运行状态、调试问题以及追踪错误。在多线程应用中,日志系统的实现需要考虑线程安全和性能。
2.1 日志系统需求
多级别日志:支持不同级别的日志记录,如DEBUG、INFO、WARNING、ERROR和FATAL。
时间戳:每条日志应包含时间戳。
线程安全:在多线程环境下安全地记录日志。
灵活的输出:日志可以输出到控制台或保存到文件。
2.2 日志系统设计
2.2.1. 日志级别
定义一个枚举Level来表示不同的日志级别,方便管理和使用。
enum Level {
DEBUG = 0,
INFO,
WARNING,
ERROR,
FATAL
};
2.2.2. 日志格式与输出
日志信息包括时间戳、日志级别、进程ID、文件名、行号和日志内容。使用LogMessage函数格式化日志消息,并根据需要输出到控制台或保存到文件。
void LogMessage(std::string filename, int line, bool issave, int level, const char *format, ...);
2.2.3. 线程安全
使用互斥锁pthread_mutex_t保证日志操作的线程安全。结合LockGuard对象自动管理锁的加解锁。
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
2.2.4. 日志输出控制
通过宏LOG定义日志记录的简便接口,并使用EnableFile和EnableScreen宏控制日志的输出方式。
#define LOG(level, format, ...) do { ... } while (0)
#define EnableFile() do { gIsSave = true; } while (0)
#define EnableScreen() do { gIsSave = false; } while (0)
2.3 日志系统实现
2.3.1 时间戳获取
实现GetTimeString函数,获取当前时间并格式化为字符串。
std::string GetTimeString();
2.3.2 日志级别转换
将日志级别转换为对应的字符串,方便阅读。
std::string LevelToString(int level);
2.3.3 日志保存
实现SaveFile函数,将日志信息追加到文件中。
void SaveFile(const std::string &filename, const std::string &message);
2.3.4 宏定义简化日志记录
使用宏定义简化日志记录过程,自动填充文件名、行号和日志级别。
#define LOG(level, format, ...) do { ... } while (0)
2.3.4 代码
// Log.hpp
#pragma once // 确保头文件只被包含一次
#include <iostream>
#include <fstream>
#include <cstdio>
#include <string>
#include <ctime>
#include <cstdarg>
#include <sys/types.h>
#include <unistd.h>
#include <pthread.h>
#include "LockGuard.hpp"
// 定义全局变量,控制日志是否保存到文件
bool gIsSave = false;
// 日志文件的默认名称
const std::string logname = "log.txt";
// 日志级别定义
enum Level {
DEBUG, // 调试信息
INFO, // 一般信息
WARNING, // 警告信息
ERROR, // 错误信息
FATAL // 严重错误信息,通常是程序不能恢复的错误
};
// 将日志信息保存到文件的函数
void SaveFile(const std::string &filename, const std::string &message) {
std::ofstream out(filename, std::ios::app); // 以追加模式打开文件
if (!out.is_open()) return; // 如果文件无法打开,直接返回
out << message; // 写入日志信息
out.close(); // 关闭文件
}
// 将日志级别转换为字符串的函数
std::string LevelToString(int level) {
switch (level) {
// 根据日志级别返回对应的字符串描述
case DEBUG: return "Debug";
case INFO: return "Info";
case WARNING: return "Warning";
case ERROR: return "Error";
case FATAL: return "Fatal";
default: return "Unknown";
}
}
// 获取当前时间的字符串形式的函数
std::string GetTimeString() {
time_t curr_time = time(nullptr); // 获取当前时间
struct tm *format_time = localtime(&curr_time); // 将时间转换为本地时间
if (format_time == nullptr) return "None"; // 如果转换失败,返回"None"
char time_buffer[1024]; // 时间字符串缓冲区
snprintf(time_buffer, sizeof(time_buffer), // 格式化时间字符串
"%d-%d-%d %d:%d:%d",
format_time->tm_year + 1900, format_time->tm_mon + 1, format_time->tm_mday,
format_time->tm_hour, format_time->tm_min, format_time->tm_sec);
return time_buffer; // 返回格式化的时间字符串
}
// 全局互斥锁,用于保证日志操作的线程安全
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
// 日志消息输出函数
void LogMessage(std::string filename, int line, bool issave, int level, const char *format, ...) {
// 构造日志消息前缀
std::string levelstr = LevelToString(level);
std::string timestr = GetTimeString();
pid_t selfid = getpid(); // 获取当前进程ID
// 使用可变参数列表构建日志消息
char buffer[1024];
va_list arg;
va_start(arg, format);
vsnprintf(buffer, sizeof(buffer), format, arg);
va_end(arg);
// 构造完整的日志消息
std::string message = "[" + timestr + "]" + "[" + levelstr + "]" +
"[" + std::to_string(selfid) + "]" +
"[" + filename + "]" + "[" + std::to_string(line) + "] " + buffer + "\n";
// LockGuard对象,自动管理互斥锁的加解锁
LockGuard lockguard(&lock);
// 根据gIsSave标志决定日志输出位置
if (!issave) {
std::cout << message; // 输出到控制台
} else {
SaveFile(logname, message); // 保存到文件
}
}
// 宏定义,简化日志记录操作
#define LOG(level, format, ...) do { \
LogMessage(__FILE__, __LINE__, gIsSave, level, format, ##__VA_ARGS__); \
} while (0)
// 宏定义,控制日志是否保存到文件
#define EnableFile() do { gIsSave = true; } while (0)
#define EnableScreen() do { gIsSave = false; } while (0)
2.4 使用日志系统
#include "Log.hpp" // 假设您的日志系统代码保存在LogSystem.hpp文件中
// 定义一个示例函数,用于演示日志记录
void exampleFunction() {
// 使用DEBUG级别记录一条消息
LOG(DEBUG, "This is a debug message from exampleFunction.");
// 使用INFO级别记录一条消息
LOG(INFO, "This function is called with INFO level logging.");
// 模拟一些操作...
// ...
// 使用ERROR级别记录一条消息
LOG(ERROR, "An error occurred in exampleFunction!");
}
int main() {
// 启用日志信息保存到文件
EnableFile();
// 使用INFO级别记录一条启动信息
LOG(INFO, "Application is starting...");
// 调用示例函数
exampleFunction();
// 禁用文件保存,仅在屏幕上显示日志
EnableScreen();
// 使用WARNING级别记录一条消息
LOG(WARNING, "This is a warning message displayed on screen.");
return 0;
}

3. 线程池
在现代软件开发中,多线程是提升应用性能、实现并发处理的关键技术。线程池作为管理线程的一种高效机制,能够显著减少线程创建和销毁的开销,同时提高资源利用率和系统稳定性。本文将详细介绍线程池的概念、实现原理以及一个基于C++的线程池实现示例。
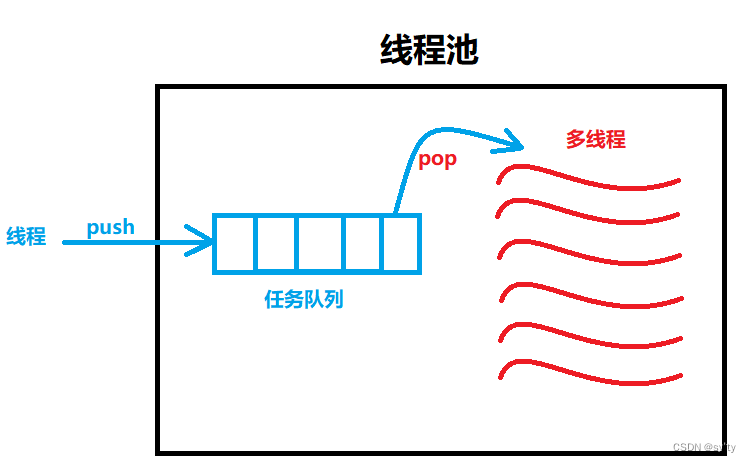
3.1 线程池的概念
线程池维护着一组工作线程,这些线程可以并发执行多个任务。线程池的核心优势包括:
资源节约:避免频繁创建和销毁线程,减少系统开销。
并发控制:限制最大并发线程数量,避免系统过载。
任务调度:智能地调度任务,提高执行效率。
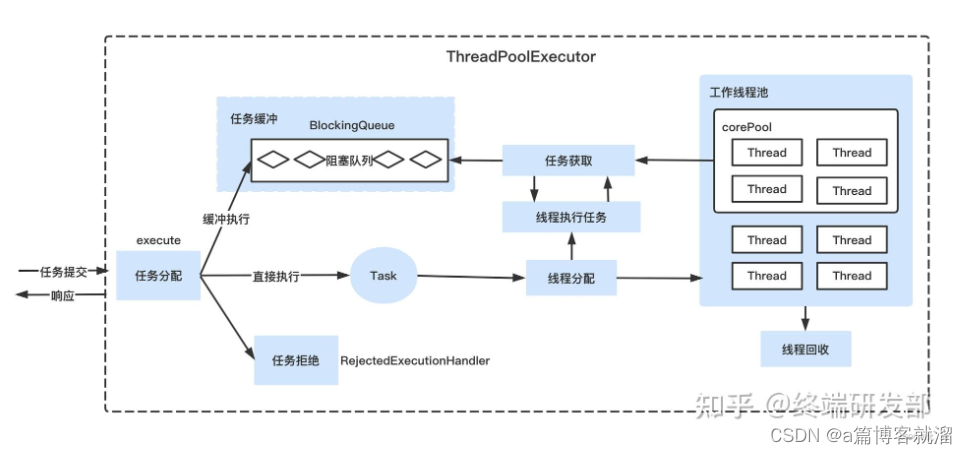
3.2 线程池的实现原理
线程池的实现涉及以下关键组件:
3.2.1 任务队列
线程池包含一个任务队列,用于存储待处理的任务。工作线程从队列中获取任务并执行。
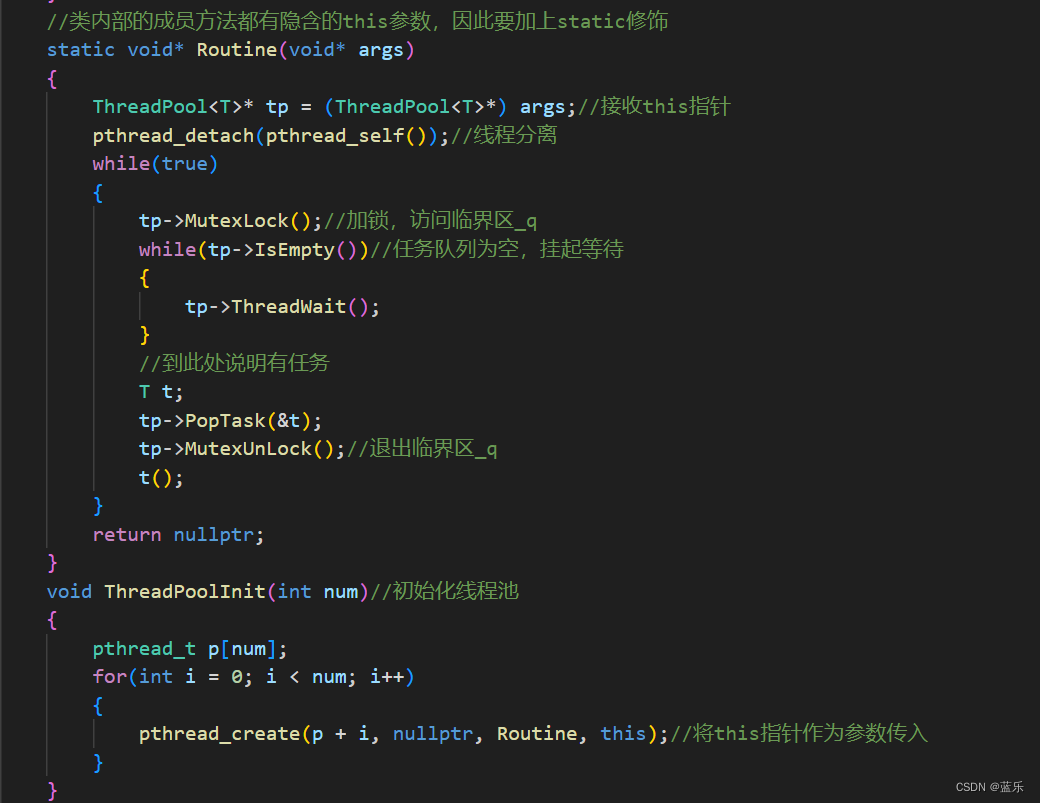
3.2.2 工作线程
线程池管理着一组工作线程,这些线程循环等待、获取并执行任务队列中的任务。
3.2.3 同步机制
为保证多线程环境下的线程安全,线程池使用互斥锁和条件变量来同步线程间的操作。
3.2.4 单例模式
线程池常采用单例模式实现,确保全局只有一个线程池实例,便于统一管理和资源共享。
3.3 线程池的实现
// ThreadPool.hpp
#pragma once // 确保头文件只被包含一次
#include <iostream>
#include <vector>
#include <queue>
#include <pthread.h>
#include "Log.hpp"
#include "Thread.hpp"
#include "LockGuard.hpp"
using namespace ThreadModule; // 假设ThreadModule是包含日志和线程操作的命名空间
const static int gdefaultthreadnum = 10; // 默认线程数量
// 线程池模板类,用于执行任意类型的任务
template <typename T>
class ThreadPool {
private:
// 互斥锁和条件变量用于同步访问任务队列
pthread_mutex_t _mutex;
pthread_cond_t _cond;
// 线程池中的线程数量
int _threadnum;
// 存储线程池中的线程
std::vector<Thread> _threads;
// 任务队列,存储待执行的任务
std::queue<T> _task_queue;
// 记录等待任务的线程数量
int _waitnum;
// 标记线程池是否正在运行
bool _isrunning;
// 私有构造函数,接受线程数量,默认使用gdefaultthreadnum
ThreadPool(int threadnum = gdefaultthreadnum) : _threadnum(threadnum), _waitnum(0), _isrunning(false) {
// 初始化互斥锁和条件变量
pthread_mutex_init(&_mutex, nullptr);
pthread_cond_init(&_cond, nullptr);
LOG(INFO, "ThreadPool Construct()"); // 记录日志,ThreadPool正在构造
}
// 禁止拷贝赋值操作符
ThreadPool<T> &operator=(const ThreadPool<T> &) = delete;
// 禁止拷贝构造函数
ThreadPool(const ThreadPool<T> &) = delete;
// 初始化线程池,创建线程但不启动
void InitThreadPool() {
for (int num = 0; num < _threadnum; ++num) {
std::string name = "thread-" + std::to_string(num + 1);
// 创建线程,并将线程的名字和任务处理函数绑定
_threads.emplace_back(std::bind(&ThreadPool::HandlerTask, this, name), name);
LOG(INFO, "init thread %s done", name.c_str());
}
_isrunning = true; // 线程池初始化完成,设置为运行状态
}
// 启动线程池中的所有线程
void Start() {
for (auto &thread : _threads) {
thread.Start(); // 启动每个线程
}
}
// 线程任务处理函数
void HandlerTask(std::string name) {
while (true) {
LockQueue(); // 加锁访问任务队列
while (_task_queue.empty() && _isrunning) { // 如果任务队列为空且线程池正在运行
_waitnum++; // 增加等待线程计数
ThreadSleep(); // 等待条件变量
_waitnum--; // 减少等待线程计数
}
if (_task_queue.empty() && !_isrunning) { // 如果任务队列为空且线程池不再运行
UnlockQueue(); // 解锁任务队列
break; // 退出循环,结束线程
}
// 从任务队列中取出任务
T task = _task_queue.front();
_task_queue.pop();
UnlockQueue(); // 解锁任务队列
LOG(DEBUG, "%s get a task", name.c_str()); // 记录日志,线程获取任务
// 执行任务
task();
// 任务执行完毕后记录日志
LOG(DEBUG, "%s handler a task, result is: %s", name.c_str(), task.ResultToString().c_str());
}
}
// 线程池单例实例和锁
static ThreadPool<T> *_instance;
static pthread_mutex_t _lock;
public:
// 获取线程池单例的静态方法
static ThreadPool<T> *GetInstance() {
if (_instance == nullptr) { // 如果单例未创建
LockGuard lockguard(&_lock); // 加锁
if (_instance == nullptr) { // 再次检查单例是否创建,确保线程安全
_instance = new ThreadPool<T>(); // 创建线程池实例
_instance->InitThreadPool(); // 初始化线程池
_instance->Start(); // 启动线程池
LOG(DEBUG, "创建线程池单例");
}
}
LOG(DEBUG, "获取线程池单例");
return _instance; // 返回单例指针
}
// 停止线程池
void Stop() {
LockQueue();
_isrunning = false; // 设置线程池为非运行状态
ThreadWakeupAll(); // 唤醒所有等待的线程
UnlockQueue(); // 解锁任务队列
}
// 等待所有线程完成它们的任务
void Wait() {
for (auto &thread : _threads) {
thread.Join(); // 等待每个线程完成
LOG(INFO, "%s is quit...", thread.name().c_str()); // 记录日志,线程退出
}
}
// 向线程池添加任务
bool Enqueue(const T &t) {
LockQueue();
if (!_isrunning) { // 如果线程池不在运行状态,返回失败
UnlockQueue();
return false;
}
_task_queue.push(t); // 将任务添加到任务队列
if (_waitnum > 0) { // 如果有线程正在等待任务
ThreadWakeup(); // 唤醒一个等待的线程
}
LOG(DEBUG, "enqueue task success"); // 记录日志,任务添加成功
UnlockQueue();
return true;
}
// 析构函数,清理线程池资源
~ThreadPool() {
Stop(); // 停止线程池
Wait(); // 等待所有线程完成
pthread_mutex_destroy(&_mutex); // 销毁互斥锁
pthread_cond_destroy(&_cond); // 销毁条件变量
}
};
// 初始化静态成员变量
template <typename T>
ThreadPool<T> *ThreadPool<T>::_instance = nullptr;
template <typename T>
pthread_mutex_t ThreadPool<T>::_lock = PTHREAD_MUTEX_INITIALIZER;
3.4 线程池的使用
#include "ThreadPool.hpp" // 包含线程池的声明
#include "Task.hpp" // 包含任务类的定义
#include "Log.hpp" // 包含日志系统的声明
#include <iostream> // 标准输入输出流
#include <string> // 字符串类
#include <memory> // 智能指针相关
#include <ctime> // 时间相关函数
int main() {
// 记录日志,表示程序已经加载
LOG(DEBUG, "程序已经加载");
// 休眠3秒,模拟程序启动延时
sleep(3);
// 获取线程池的单例对象
ThreadPool<Task>::GetInstance();
// 再次休眠2秒,观察单例对象是否重复创建(它不应该被重复创建)
sleep(2);
// 再次获取线程池单例对象,这将返回同一个实例
ThreadPool<Task>::GetInstance();
// 休眠2秒
sleep(2);
// 再次获取线程池单例对象
ThreadPool<Task>::GetInstance();
// 休眠2秒
sleep(2);
// 再次获取线程池单例对象
ThreadPool<Task>::GetInstance();
// 休眠2秒
sleep(2);
// 获取线程池单例对象,并调用Wait方法等待所有任务完成
ThreadPool<Task>::GetInstance()->Wait();
// 休眠2秒,等待所有任务确保已经完成
sleep(2);
return 0; // 程序结束
}

总结
本文详细介绍了多线程编程中的三个关键概念:线程封装、日志系统设计,以及线程池的实现和使用。
线程封装:通过封装线程的创建和管理,我们简化了多线程编程的复杂性,提供了线程的启动、同步和停止的简洁接口,增强了代码的可读性和可维护性。
多线程环境下的日志系统设计:设计了一个支持多级别日志记录、时间戳、线程安全和灵活输出的日志系统。通过宏定义简化了日志记录的过程,并通过互斥锁确保了日志操作的线程安全。
线程池:重点介绍了线程池的概念和实现原理。线程池通过维护一组工作线程来执行多个任务,显著减少了线程创建和销毁的开销。线程池的实现涉及任务队列、工作线程、同步机制和单例模式。通过一个基于C++的线程池实现示例,展示了如何创建、启动、停止和使用线程池。
线程池的使用示例进一步说明了如何通过单例模式获取线程池实例,如何向线程池提交任务,以及如何等待所有任务完成。这些技术不仅提高了程序的性能,还增强了程序的稳定性和可扩展性。
通过本文的深入探讨和代码示例,读者应该能够更好地理解多线程编程中的高级概念,并将其应用于实际的软件开发项目中。随着多核处理器的普及和并发需求的增加,掌握线程封装、日志系统设计和线程池实现的技术将变得越来越重要。