高级定时的通道1、2、3可以分别输出2路互补信号,互补输出一般用于驱动H桥电路。
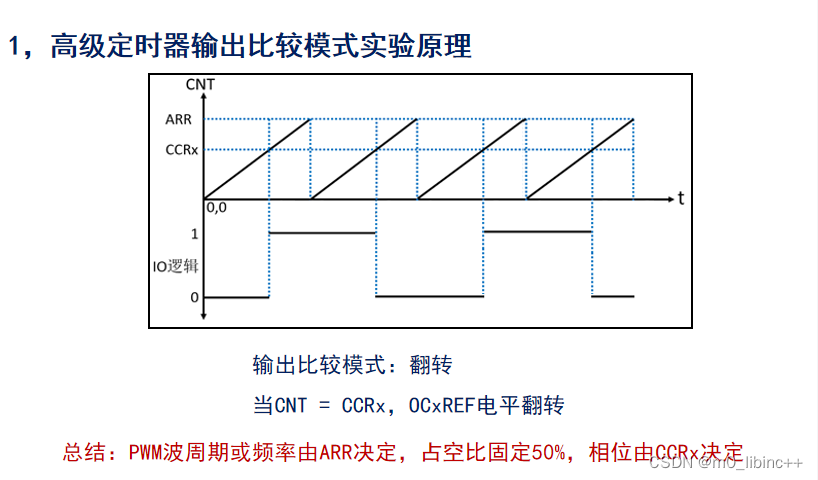
频率周期相同,相位差180度。
引入死区时间,一般mos管器件关断慢,开通快。会造成短路,导致器件烧毁。
刹车信号,连接brk,可以用作输入信号,去操作DTG寄存器,然后处理突发事件。
重复计数器,比如可以生成有限次的pwm,生成3次,只需要重复次数写2。
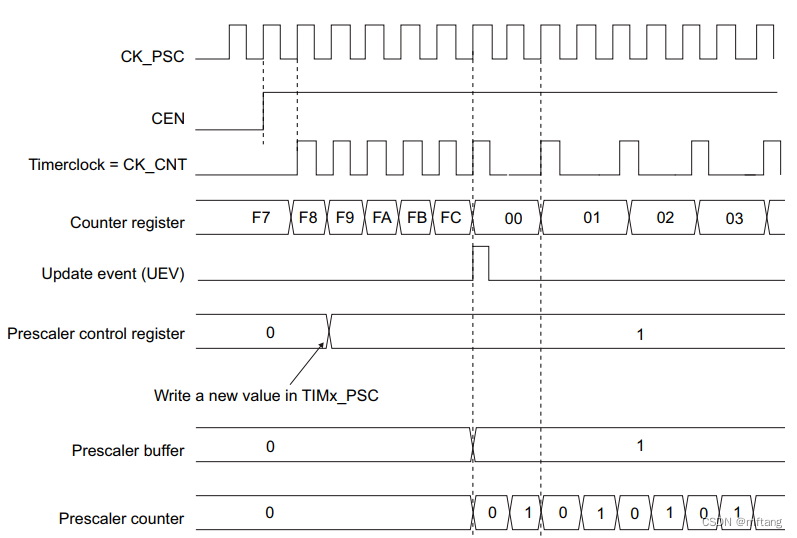
对于高级定时器必须发生RCR+1次溢出动作后才可以产生更新事件。对于通用或基本定时器,每溢出一次就可以产生更新事件。
Driver_TIM1.c
#include "Driver_TIM1.h"
#include "stdio.h"
#include "Driver_USART.h"
void Driver_TIM1_Init(void)
{
/* 1. 开启时钟 */
/* 1.1 TIM1的时钟 */
RCC->APB2ENR |= RCC_APB2ENR_TIM1EN;
/* 1.2 GPIO的时钟 */
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
/* 2. 给PA8配置复用推挽输出 CNF=10 MODE=11*/
GPIOA->CRH |= (GPIO_CRH_CNF8_1 | GPIO_CRH_MODE8);
GPIOA->CRH &= ~GPIO_CRH_CNF8_0;
/* 3. 时基单元的配置 频率是2Hz的PWM*/
/* 3.1 预分频 */
TIM1->PSC = 7200 - 1;
/* 3.2 自动重装载寄存器的值 */
TIM1->ARR = 5000 - 1;
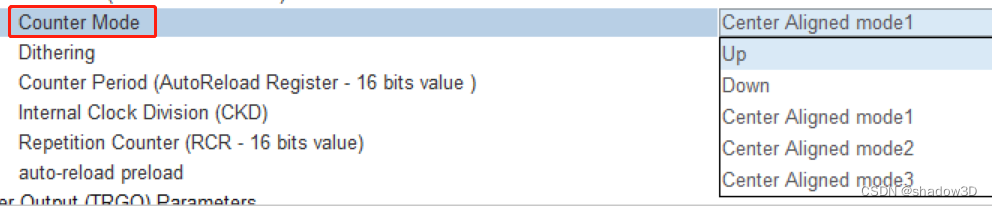
/* 3.3 计数方向 0=向上计数 1=向下计数*/
TIM1->CR1 &= ~TIM_CR1_DIR;
/* 3.4 重复寄存器 RCR=4 表示CNT计数器溢出5次,才会产生更新时间(中断)*/
TIM1->RCR = 4;
/* 4. 输出部分配置 */
/* 4.1 把通道1配置为输出*/
TIM1->CCMR1 &= ~TIM_CCMR1_CC1S;
/* 4.2 配置捕获比较寄存器的值 */;
TIM1->CCR1 = 2500; /* 占空比 50% */
/* 4.3 输出的极性 0=高电平有效 1=低电平有效 */;
TIM1->CCER &= TIM_CCER_CC1P;
/* 4.4 使能通道1 */;
TIM1->CCER |= TIM_CCER_CC1E;
/* 4.5 配置通道1输出模式: PWM1=110 */
TIM1->CCMR1 |= (TIM_CCMR1_OC1M_2 | TIM_CCMR1_OC1M_1);
TIM1->CCMR1 &= ~TIM_CCMR1_OC1M_0;
/* 4.6 主输出使能(只有高级定时器需要配置)*/
TIM1->BDTR |= TIM_BDTR_MOE;
/* 4.7 防止一启动就进入更新中断: 1. 使用UG位产生一个更新事件 2.然后预分频和重复计数器的值更新到影子寄存器 */;
TIM1->EGR |= TIM_EGR_UG;
TIM1->SR &= ~TIM_SR_UIF;
/* 5. 配置中断 */
/* 5.1 定时器更新中断使能 */
TIM1->DIER |= TIM_DIER_UIE;
/* 5.2 NVIC的配置 */
NVIC_SetPriorityGrouping(3);
NVIC_SetPriority(TIM1_UP_IRQn, 3);//更新中断
NVIC_EnableIRQ(TIM1_UP_IRQn);
}
void Driver_TIM1_Start(void)
{
TIM1->CR1 |= TIM_CR1_CEN;
}
void Driver_TIM1_Stop(void)
{
TIM1->CR1 &= ~TIM_CR1_CEN;
}
void TIM1_UP_IRQHandler(void)
{
// 停掉计数器
printf("a\r\n");
//清除更新事件标志位(UIF)
TIM1->SR &= ~TIM_SR_UIF;
Driver_TIM1_Stop();
}
Driver_TIM1.h
#ifndef __DRIVER_TIM1_H
#define __DRIVER_TIM1_H
#include "stm32f10x.h"
void Driver_TIM1_Init(void);
void Driver_TIM1_Start(void);
#endif