文章目录
前言
本篇文章将带体验香橙派AIpro的强劲性能,将从搭建开发环境到体验ROS机器人操作系统来展开。
一、香橙派AIpro开箱及功能介绍
1.1香橙派AIpro开箱
香橙派AIpro包装是比较精致的,一共包含开发板,65W充电器和充电线一根,而且在这里也可以看出这个开发板的体积还是比较小的,方便携带和安装使用。

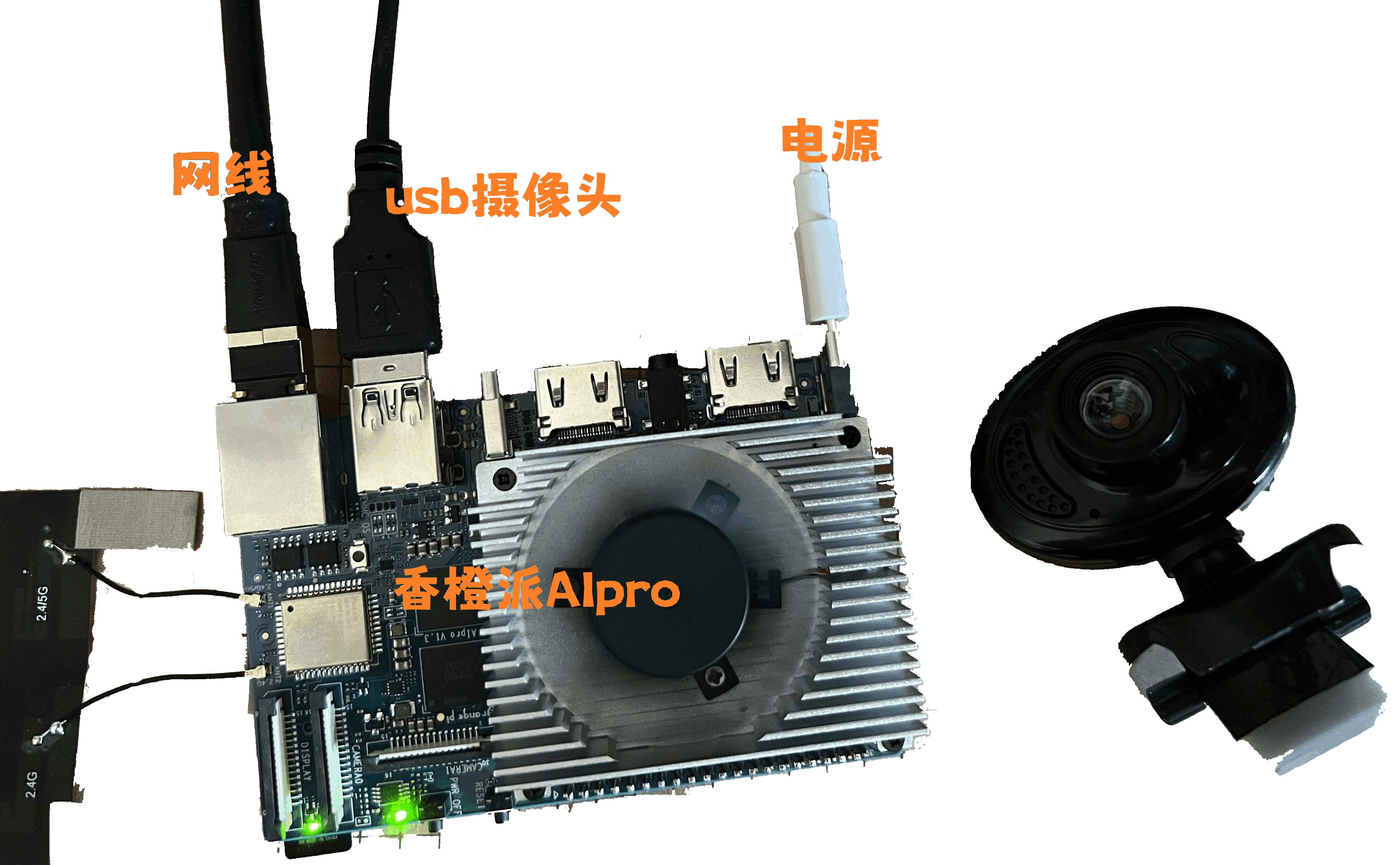
接下来把电源插和USB线插上,香橙派AIpro启动!当插上电源后风扇就开始转动,在开机的过程中风扇转的比较快,因为需要做内部硬件的一些初始化,当开机完成后风扇转速趋于平稳,这个时候基本上是听不到风扇在转的,噪音还是比较小的。

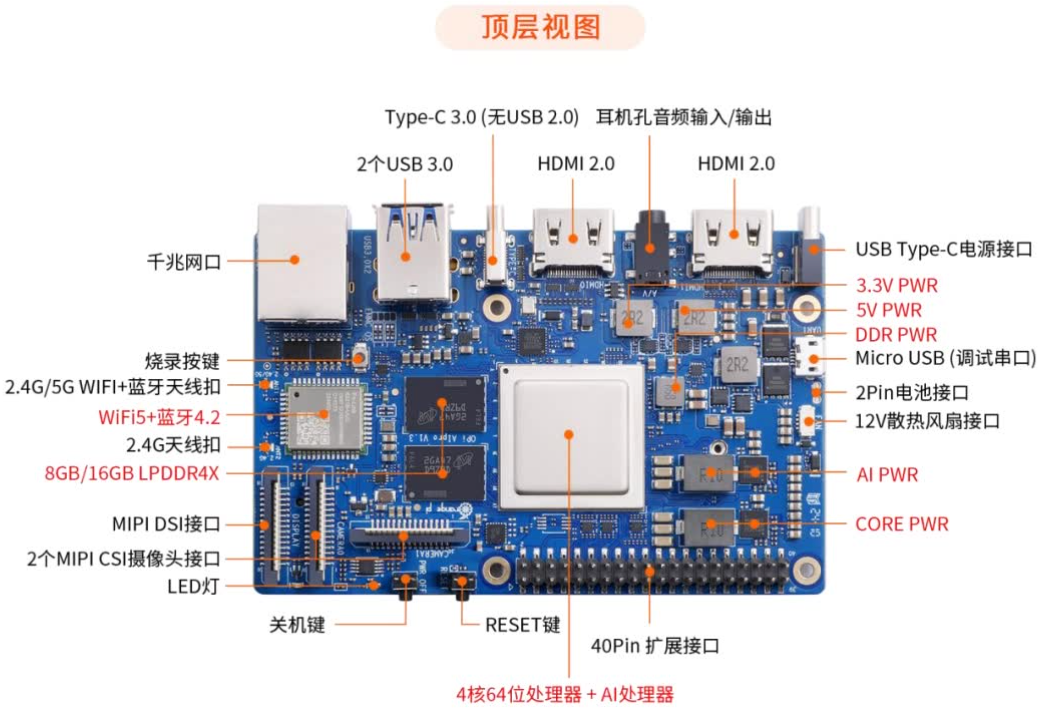
1.2香橙派AIpro功能介绍
香橙派AIpro搭载了4核64位+AI处理器,这个性能还是非常强的,现在AI发展的比较迅速,拿这个开发板来进行AI的学习还是非常合适的,可以在开发板中部署自己的一些AI模型等。
香橙派AIpro的外设也是比较丰富的,同时还配备了HDMI接口,使用HDMI线就可以将香橙派AIpro当作一个主机来进行使用。

使用HDMI线连接到屏幕后开机效果:
整个桌面还是比较简洁的。

二、香橙派AIpro资料下载及环境搭建
2.1资料下载
进入官网下载需要的资料:

这个镜像是比较重要的,这里下载ubuntu镜像,也可以根据自己的使用情况来下载对应的镜像。

2.2环境搭建
首先需要将下载的ubuntu镜像烧录到TF卡中,这里使用TF卡启动。在烧录的时候需要准备好TF卡和读卡器。
下载烧录软件:
进入烧录软件界面:

将桌面版本的镜像解压出来:

选择镜像进行烧录:

开始烧录:

等待烧录完成:

烧录成功:

2.3使用串口启动进入开发板
使用MobaXterm软件打开开发板的串口:
选择对应的串口并且将波特率设置为115200。

用户名为:HwHiAiUser
密码为:Mind@123
使用串口登陆开发板后就可以使用命令行来操作开发板了:

2.4使用HDMI线接入屏幕启动
这里将HDMI线接入到开发板中然后启动开发板就可以了。
进入桌面系统:
这个桌面系统的话可以使用命令行终端来进行操作,也可以和普通的电脑一样使用浏览器等功能。
接上音响,键盘,鼠标后还能当作迷你电脑使用。

三、部署ROS系统
搭建好开发环境并且进入了桌面系统后接下来就可以进行ROS系统的部署了,ROS是一个常用的机器人操作系统,那么现在来尝试一下将ROS系统部署到香橙派AIpro中。
打开命令行终端部署ROS:
使用下面这条指令可以快速下载并且部署ROS:
wget http://fishros.com/install -O fishros && bash fishros

在后面部署的过程中会有一些选项,这里也会有对应的提示,直接选择默认的选项就可以了。

当部署成功后重新打开终端进行ROS测试:
打开一个终端输入下面指令打开小乌龟:
ros2 run turtlesim turtlesim_node
然后再打开一个终端打开键盘来控制小乌龟:
ros2 run turtlesim turtle_teleop_key
成功测试,搭建成功!

四、香橙派AIpro的使用和体验感受
使用香橙派AIpro搭建ROS操作系统整体还是非常快速的,因为这块开发板的性能是比较高的,并且支持无线wifi,使用wifi就可以将ROS下载下来,非常的方便,在使用的过程中可以完全使用命令行进行操作,并且在部署的过程中CPU的占用率以及风扇的转速都控制的比较好。
总体而言,香橙派AIpro以其高性能、便捷的无线连接和优秀的系统管理能力,为ROS操作系统的搭建和使用提供了强有力的支持。























![[Vulnhub] Pinkys-Palace2 Ports-Knocking+ssh_crack+LFI+RE+Corn+RE&BOF](https://img-blog.csdnimg.cn/img_convert/9bcc8a83a17a08826de2bc861db04578.jpeg)

















