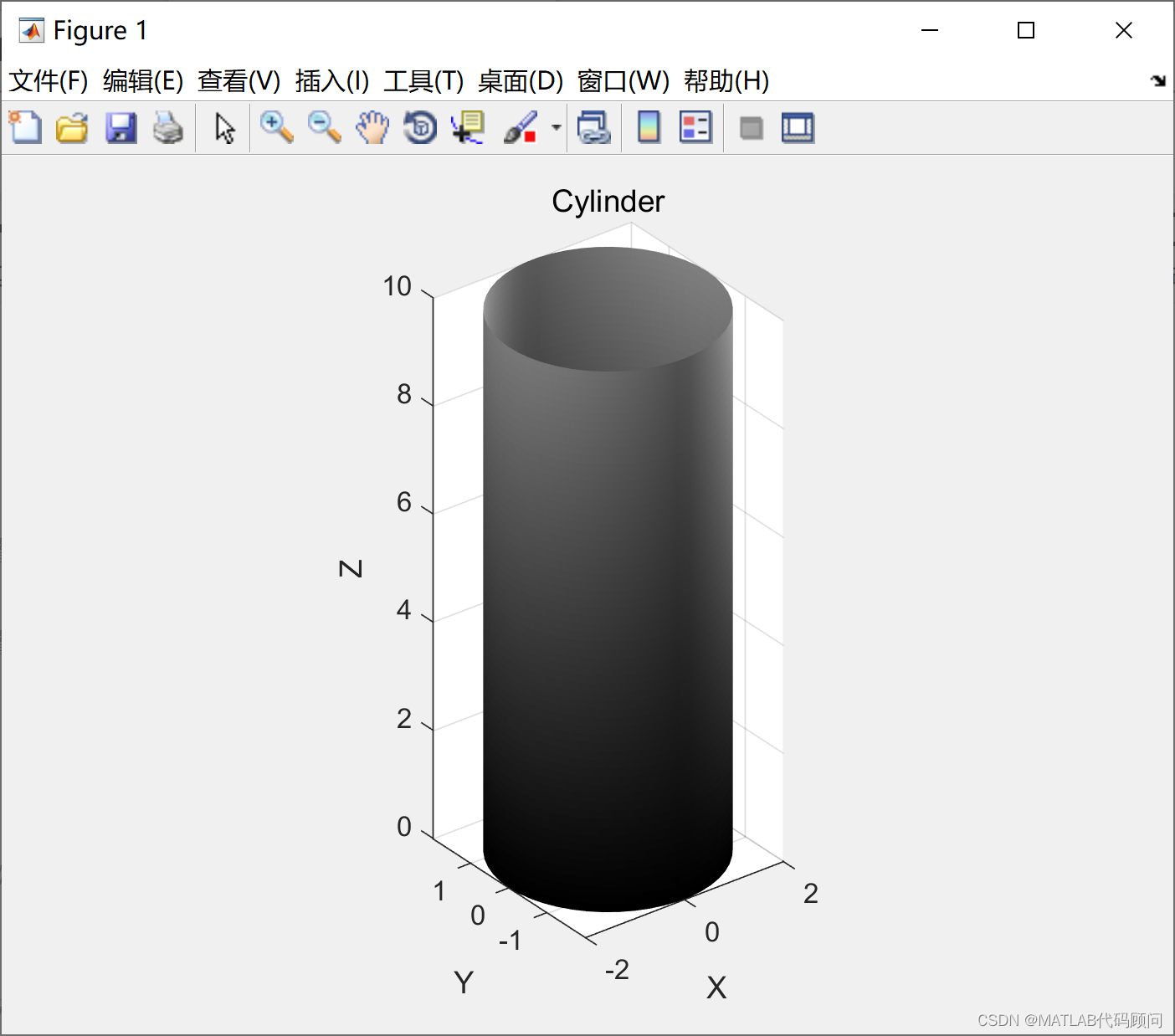
圆柱坐标(Cylindrical)
圆柱坐标:一个点的cylindrical coordinates。英语:cylindrical coordinate system)是一种三维坐标系统。它是二维极坐标系往 z-轴的延伸。添加的第三个坐标 𝑧 专门用来表示 P 点离 xy-平面的高低。按照国际标准化组织建立的约定 (ISO 31-11) ,径向距离、方位角、高度,分别标记为 (𝜌 , 𝜙, 𝑧)。
一般使用(radius,theta,height)来表示点位坐标,三个值可以根据实际使用情况做互换
平面直角坐标系,一般以 (x,y) 两个数值来表示点位坐标
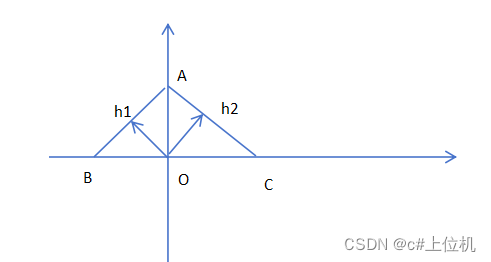
极坐标系,一般以(radius,theta),半径和旋转角度来表示点位坐标
极坐标系和平面直角坐标系可以互相转换:
//平面直角坐标系转极坐标系
let radius = Math.sqrt( x * x + y * y );
let theta = Math.atan( y / x );
//极坐标系转平面直角坐标系
let x = radius * Math.cos(theta);
let y = radius * Math.sin(theta);
构造器(Constructor)
Cylindrical( radius : Float, theta : Float, y : Float )
radius - 从原点到x-z平面上一点的距离 默认值为 1.0.
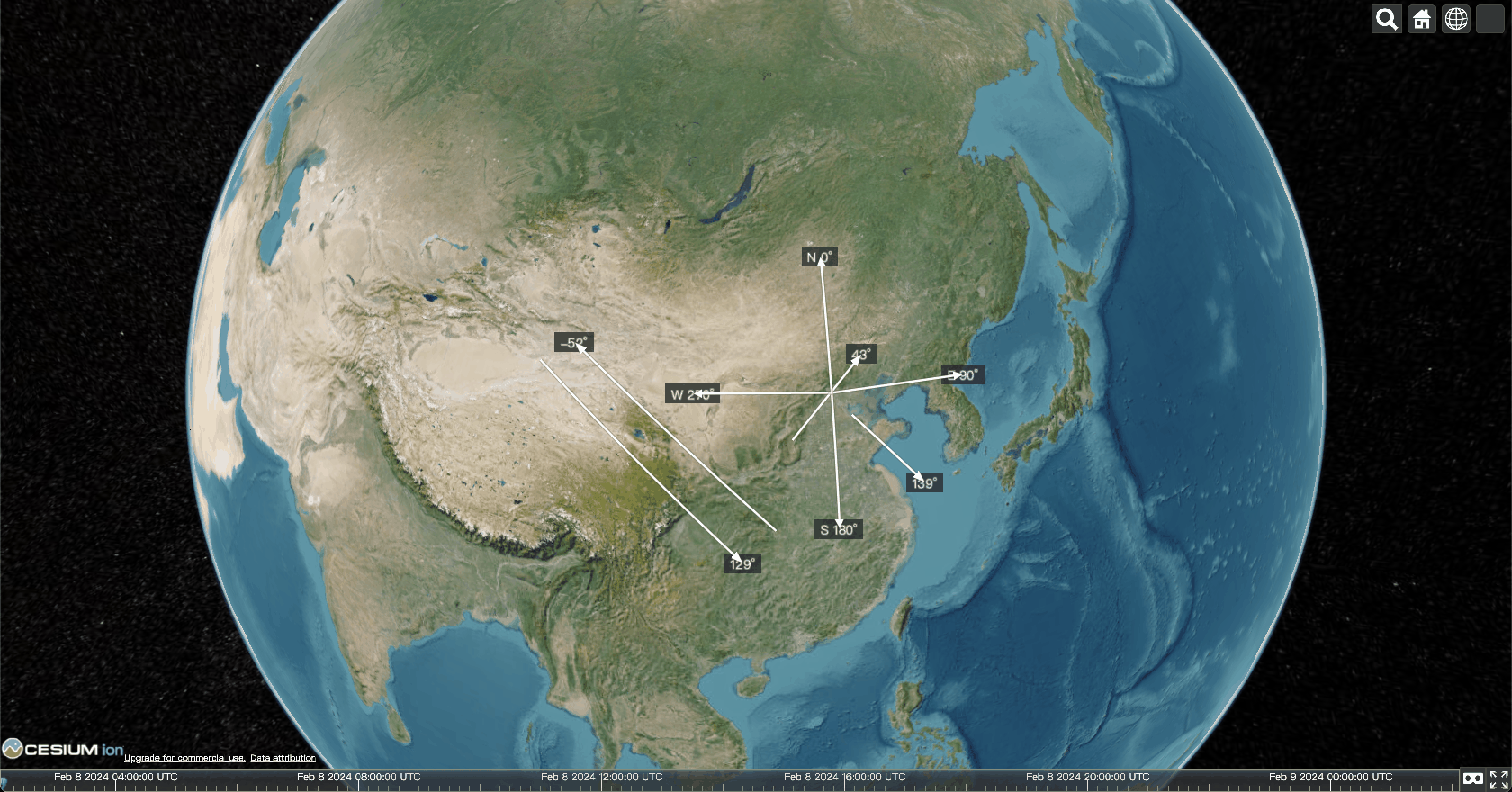
theta - 在x-z平面内的逆时针角度,以z轴正方向的计算弧度。默认值为0。
y - x-z平面以上的高度 默认值为 0.
属性(Properties)
# .radius : Float
radius - 从原点到x-z平面上一点的距离 默认值为 1.0.
# .theta : Float
theta - 在x-z平面内的逆时针角度,以z轴正方向的计算弧度。默认值为0。
# .y : Float
y - x-z平面以上的高度 默认值为 0.
Methods
# .clone () : Cylindrical
返回一个与当前拥有相同 radius, theta 和 y 属性的圆柱坐标。
# .copy ( other : Cylindrical ) : Cylindrical
将传入的圆柱坐标对象的 radius, theta 和 y 属性赋给当前对象。
# .set ( radius : Float, theta : Float, y : Float ) : Cylindrical
设置该对象的 radius, theta 和 y 属性。
# .setFromVector3 ( vec3 : Vector3 ) : Cylindrical
从 Vector3 中取x,y,z,并调用setFromCartesianCoords来设置圆柱坐标的 radius、theta 和 y 的属性值。
# .setFromCartesianCoords ( x : Float, y : Float, z : Float ) : Cylindrical
使用笛卡尔坐标来设置该圆柱坐标中 radius, theta 以及 y 的属性值。
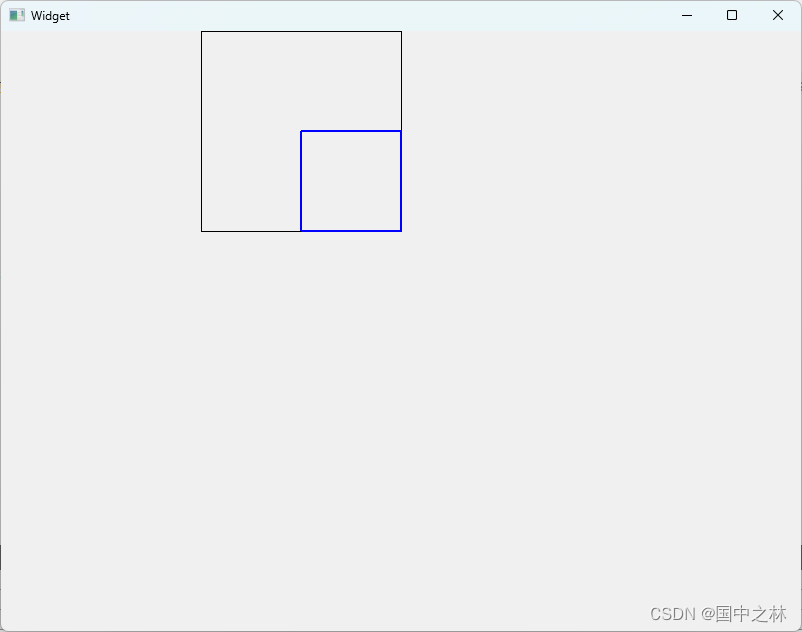
视锥体(Frustum)
Frustums 用于确定相机视野内的东西。 它有助于加速渲染过程——位于摄像机视锥体外的物体可以安全地排除在渲染之外。
该类主要用于渲染器内部计算 camera 或 shadowCamera的视锥体。
构造器(Constructor)
Frustum(p0 : Plane, p1 : Plane, p2 : Plane, p3 : Plane, p4 : Plane, p5 : Plane)
p0 - (可选参数) Plane.
p1 - (可选参数) Plane.
p2 - (可选参数) Plane.
p3 - (可选参数) Plane.
p4 - (可选参数) Plane.
p5 - (可选参数) Plane.
使用6个面来构建一个视锥体。
属性(Properties)
# .planes : Array
包含6个平面 planes 的数组。
方法(Methods)
# .clone () : Frustum
返回一个与当前对象有相同参数的视锥体。
# .containsPoint ( point : Vector3 ) : Boolean
point - Vector3 to test.
检测该点 point 是否在视锥体内。
# .copy ( frustum : Frustum ) : Frustum
frustum - 用于拷贝的视锥体。
将传入 frustum 的属性拷贝到当前对象。
# .intersectsBox ( box : Box3 ) : Boolean
box - Box3 用于检测是否要交的包围盒。
返回 true 如果该 box 与视锥体相交。
# .intersectsObject ( object : Object3D ) : Boolean
检测 object 的包围球 bounding sphere 是否与视锥体相交。
注意:该对象必须有一个 Geometry 或 BufferGeometry ,因为这样才能计算出包围球。
# .intersectsSphere ( sphere : Sphere ) : Boolean
sphere - Sphere 用于检查是否相交。
返回true 如果球sphere与视锥体相交。
# .intersectsSprite ( sprite : Sprite ) : Boolean
检查精灵sprite是否与截锥体相交。
# .set ( p0 : Plane, p1 : Plane, p2 : Plane, p3 : Plane, p4 : Plane, p5 : Plane ) : Frustum
使用传入的平面设置当前视锥体。没有隐式的顺序。
# .setFromMatrix ( matrix : Matrix4 ) : Frustum
matrix - Matrix4 用于设置 planes
WebGLRenderer 使用 Camera的投影矩阵(projectionMatrix ) 和相机世界变换矩阵的逆矩阵 matrixWorldInverse 来设置视锥体。




























![高并发reactor服务器[中]](https://img-blog.csdnimg.cn/img_convert/28f57cb511303f3325a73f06a831223d.png)

