1. 论文基本信息
发布于: 2022
2. 创新点
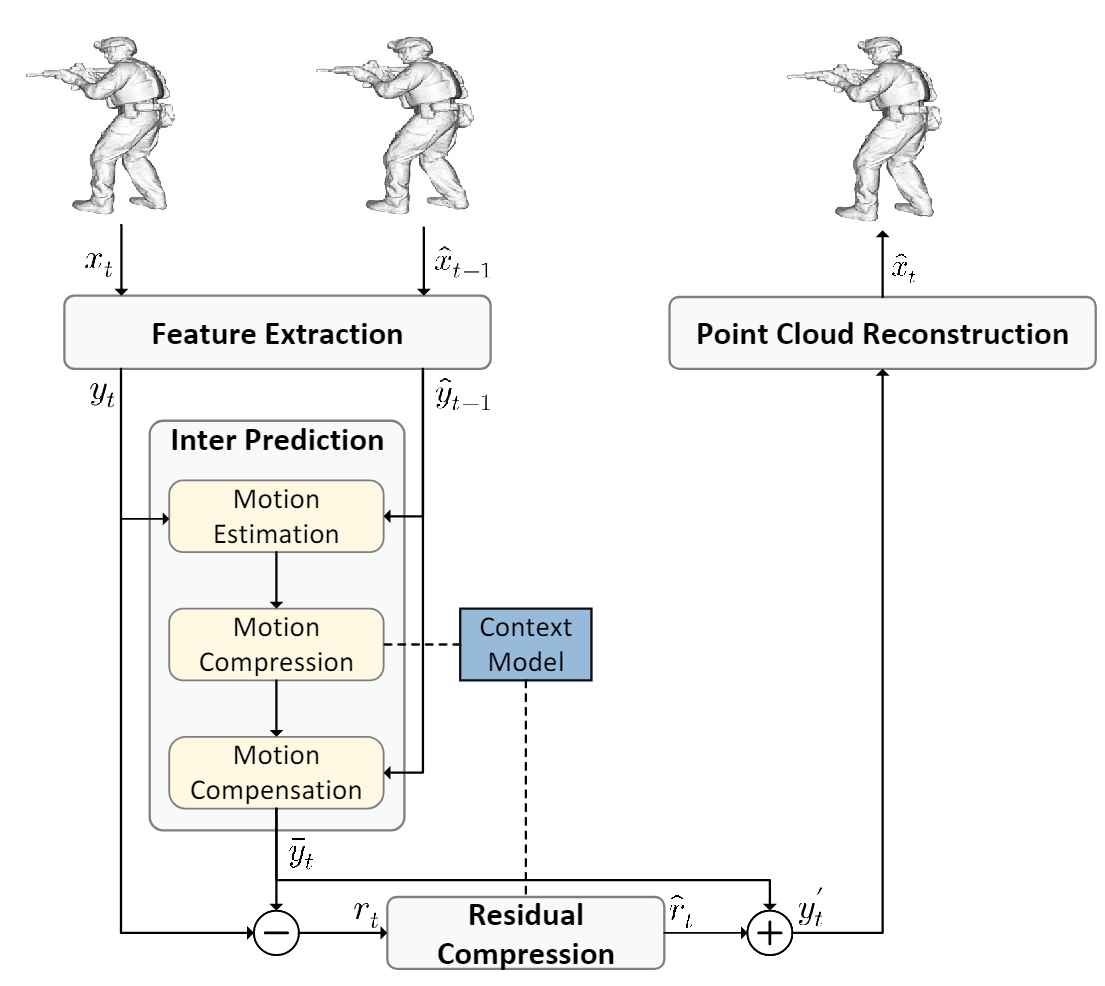
- 首先提出了一种端到端深度动态点云压缩框架(D-DPCC),用于运动估计、运动补偿、运动压缩和残差压缩的联合优化。
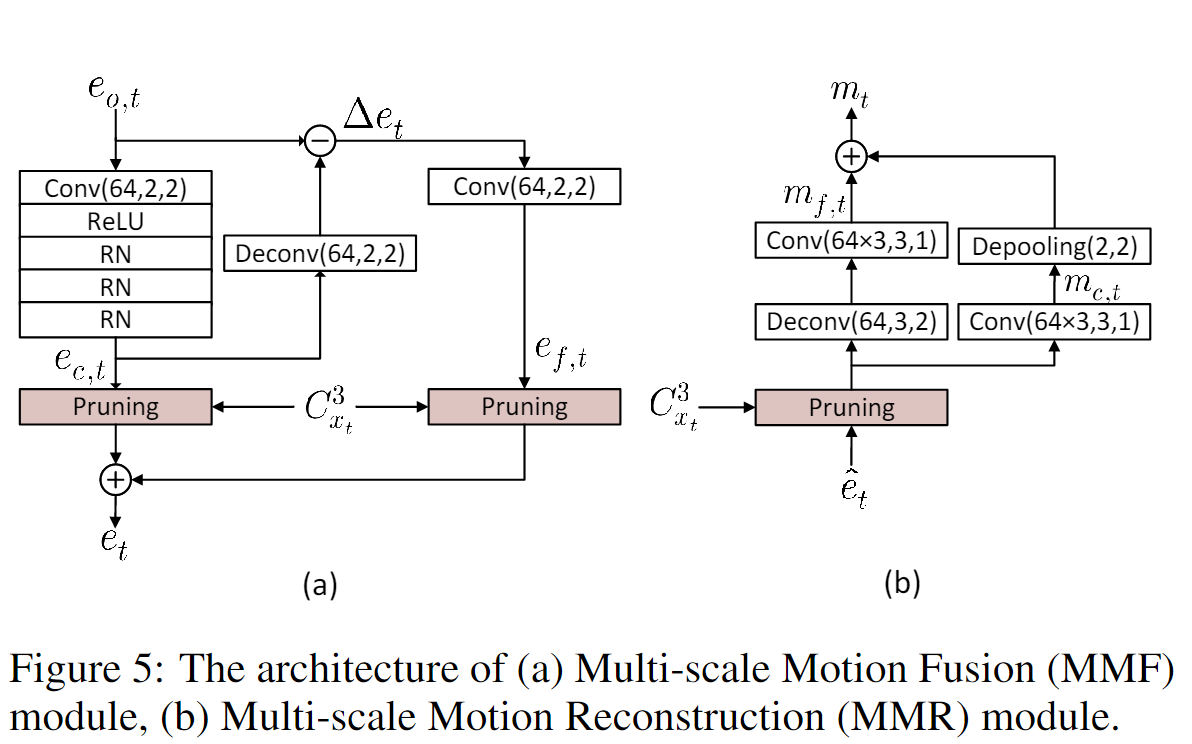
- 提出了一种新的多尺度运动融合(MMF)模块用于点云帧间预测,该模块提取和融合不同运动流信息尺度,用于精确的运动估计。
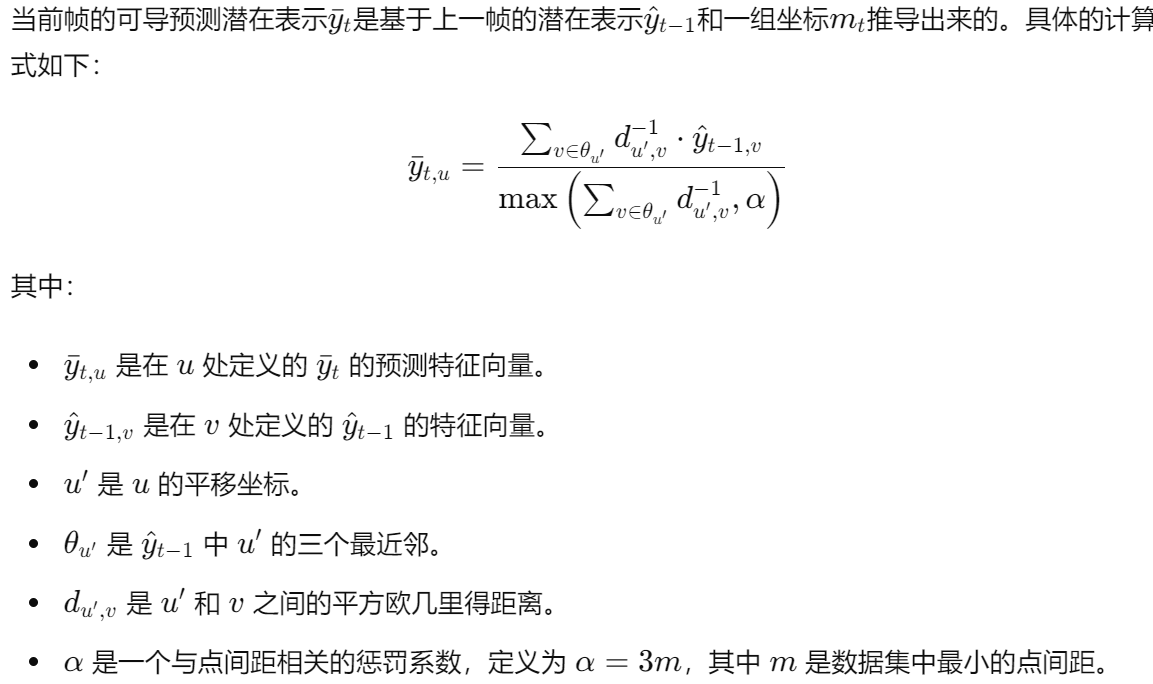
- 对于运动补偿,论文提出了一种新颖的 3D 自适应加权插值 (3DAWI) 算法,该算法利用邻居信息并自适应地减少远距离邻居的影响,从而对当前帧的特征产生逐点预测。
3. 背景
之前的方法例如 V-PCC 大多是采用将三维点云投影到二维平面上,然后采用成熟的视频压缩方法对投影后的点云进行压缩,而基于几何的 PCC 例如 G-PCC 在静态点云上的压缩取得了比较明显的进步。因此本文旨在提供一种端到端的动态点云压缩框架。
大多数学习到的 SPC 压缩方法都建立在密集对象点云的自动编码器架构之上 ,它将 SPC 压缩分为三个连续的步骤:特征提取、深度熵编码和点云重建。然而,将 SPC 压缩网络直接迁移到 DPC 并非易事。关键的挑战是将运动估计和运动补偿嵌入到端到端压缩网络中,以消除时间冗余。
4. Pipeline
4.1. 特征提取
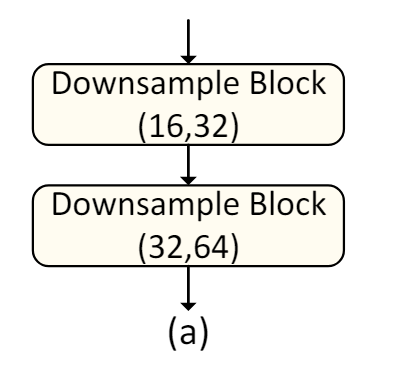
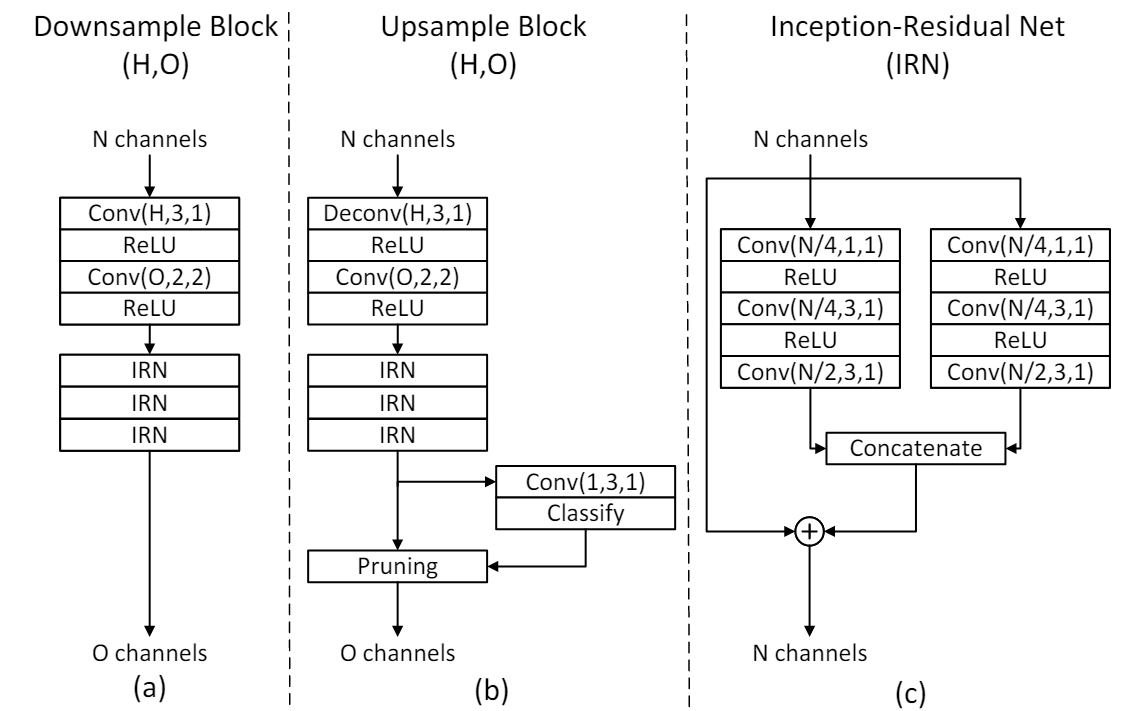
采用基于稀疏 CNN 的下采样块(图 3(a))进行低复杂度的点云下采样。下采样块由用于点云下采样的步幅两个稀疏卷积层组成,然后是几个初始残差网络 (IRN) 块用于局部特征分析和聚合。
4.2. 帧间预测
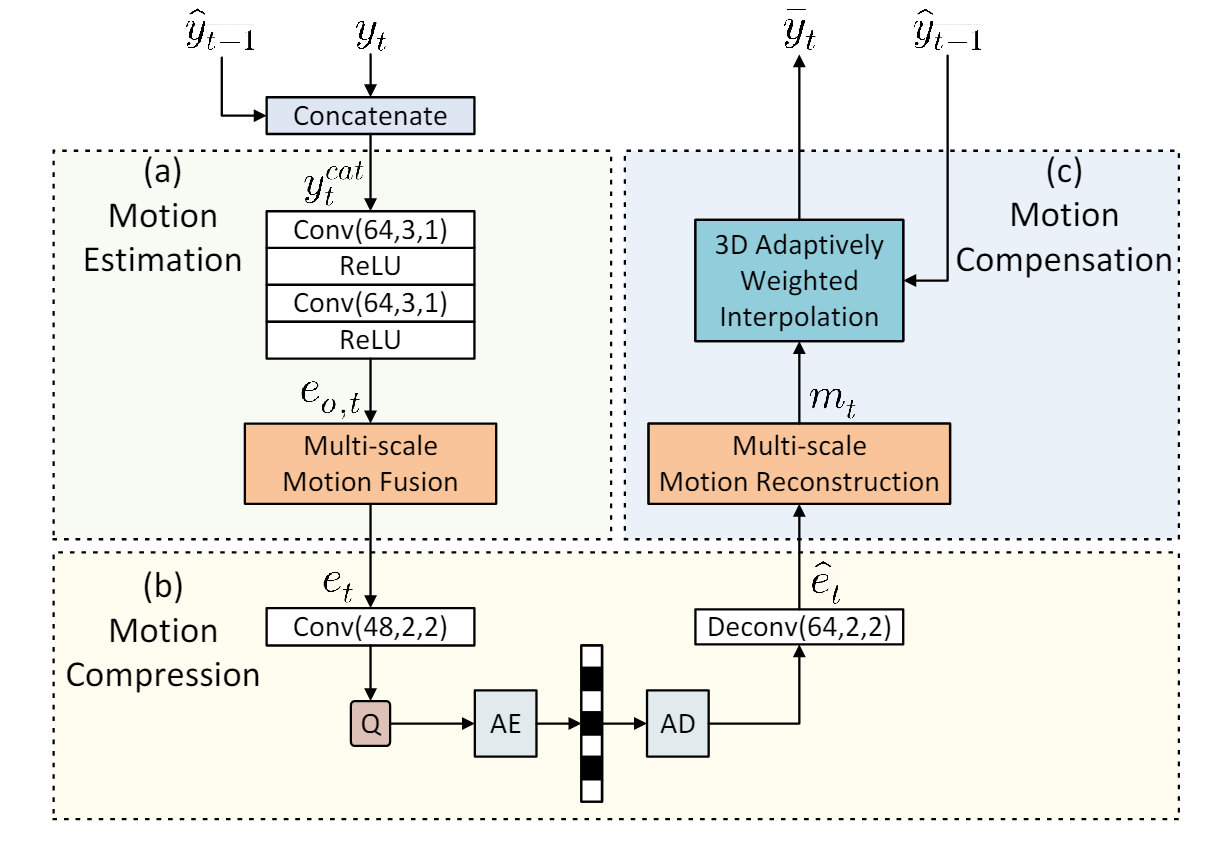
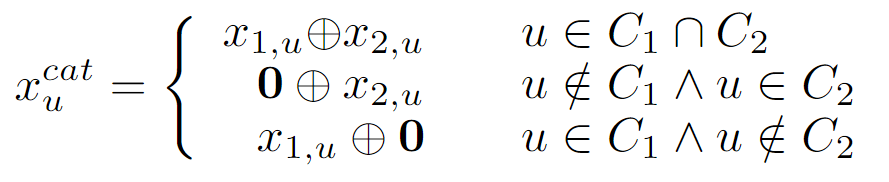
预测模块的整体架构如图4所示。具体来说,我们首先将 yt 和 ˆyt−1 连接在一起得到 y cat t。点云的连接操作定义为:
4.3. 多尺度运动融合
4.4. 3D 自适应加权插值
4.5. 残差压缩
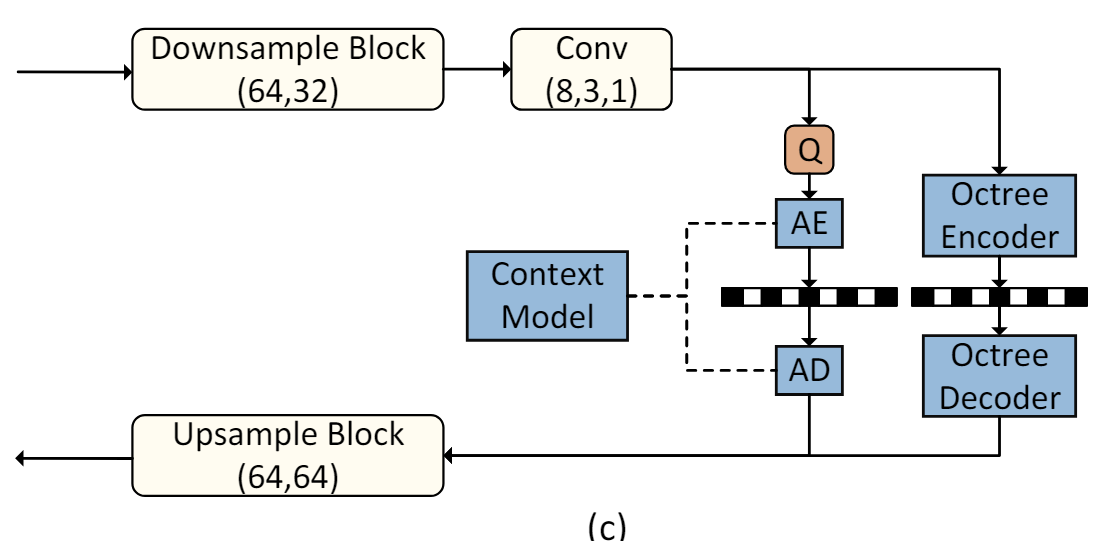
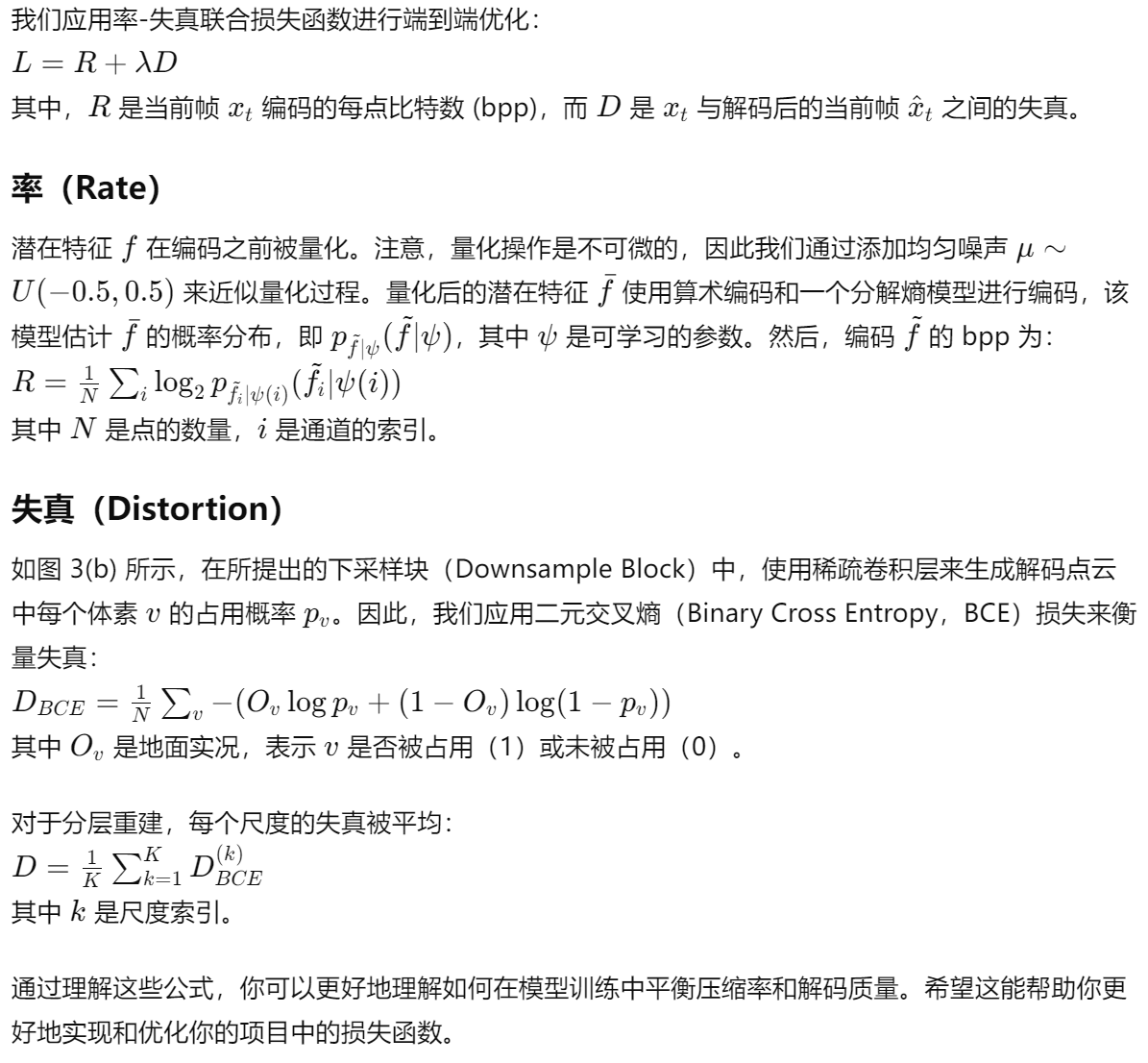
4.6. 损失函数
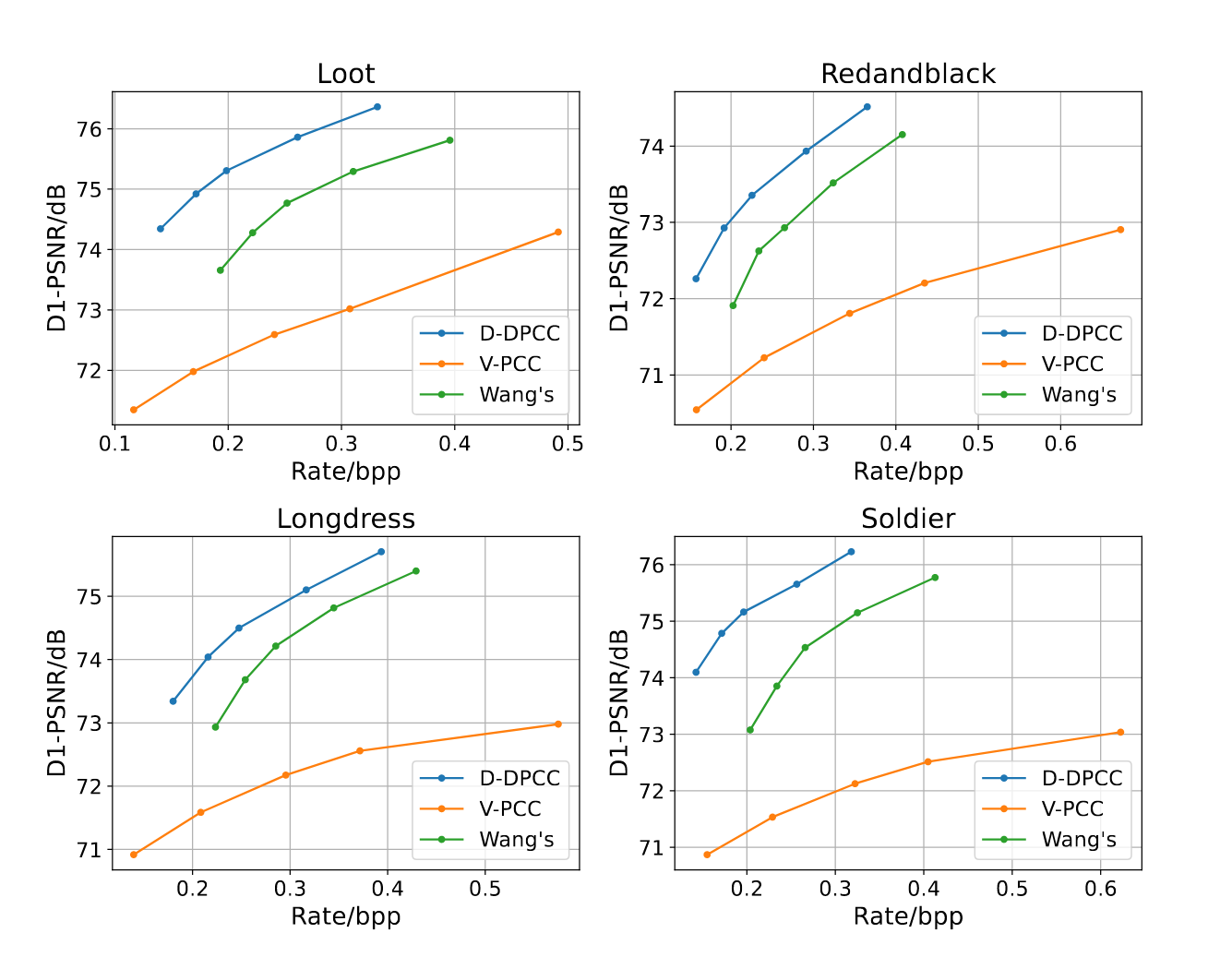
5. 💎实验成果展示