CLion实现Node debug
我了解到的node,大多是通过终端运行,但是使用clion不断debug断点进行调试一直使我很苦恼,所以此次记录一下如何通过clion实现node节点之间通过publisher以及subscriber进行节点话题间的发布与通信,实现节点间的话题下的数据共享(我真感觉这是个有趣的东西ROS!)
受益匪浅的博客
一些重点:
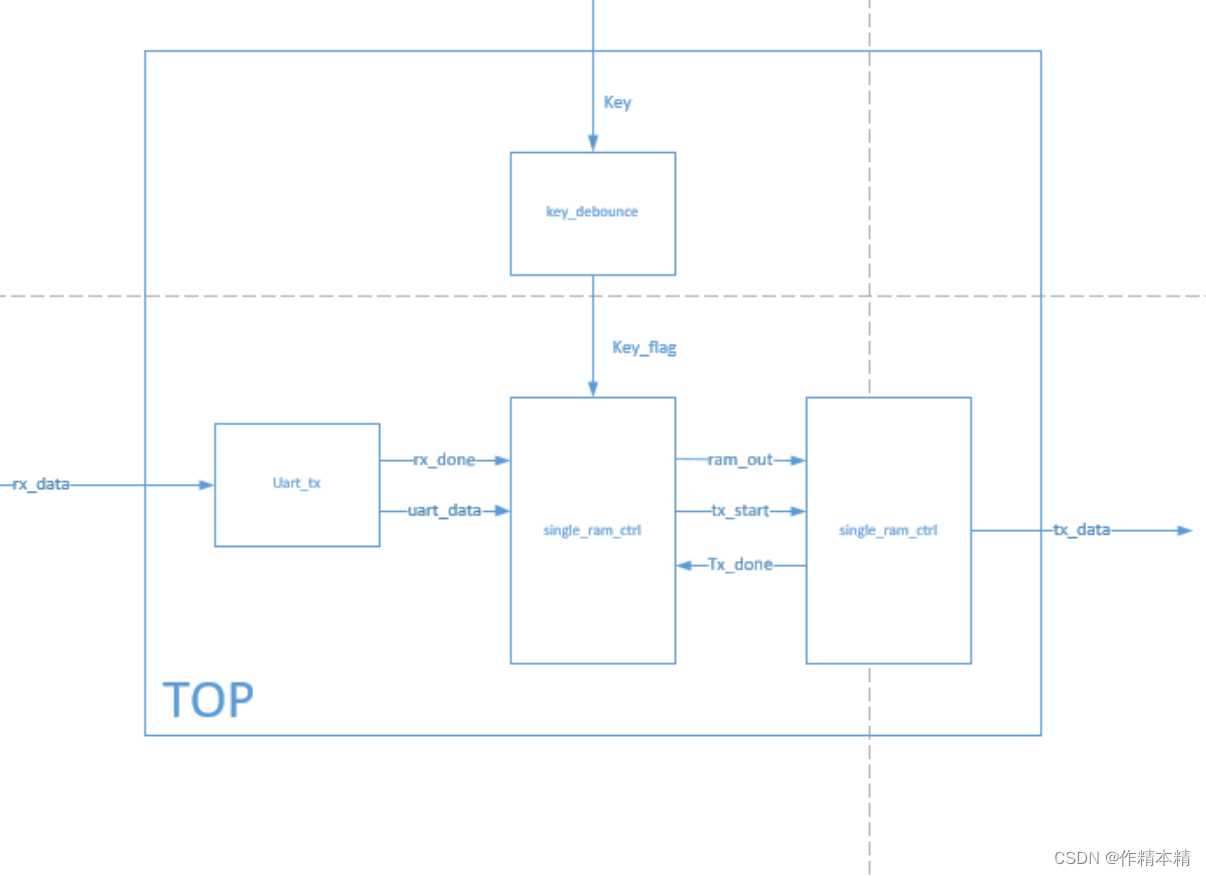
ROS中,消息的发布(publish)和订阅(subscribe)是实现节点间通信的重要方式。通过发布和订阅消息,节点可以实现信息的传递和共享。
要发布消息,首先需要创建一个ROS发布器(Publisher)对象,并指定要发布的消息类型和话题名称。然后,可以使用publish()方法将消息发布到指定的话题。
要订阅消息,需要创建一个ROS订阅器(Subscriber)对象,并指定要订阅的消息类型、话题名称和回调函数。当有新消息到达时,回调函数将被调用。
在ROS中,话题(Topic)是一种用于实现消息传递机制的重要概念。通过话题,不同的节点可以相互通信和交换数据,实现信息的发布和订阅
步骤:
- 首先,打开clion,记着是在terminal终端打开clion:clion.sh运行,然后通过roscore实现核心ros环境激活
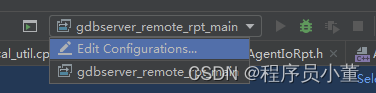
- 设置好相应的setting后,选择第一个需要调试的节点NODE,然后配上程序的参数.launch文件(见下图),然后选择🦐(debug)
 3. 在选择我们实现紧组合dpr_car_fusion.cpp的NODE,然后配置相关的program arguments(见下图),然后选择小虫子🦐(debug)
3. 在选择我们实现紧组合dpr_car_fusion.cpp的NODE,然后配置相关的program arguments(见下图),然后选择小虫子🦐(debug)
 如果两个都debug成功后,会在debug的窗口下存在两个正在执行的program thread
如果两个都debug成功后,会在debug的窗口下存在两个正在执行的program thread
 通过实现continue,不断进行断点调试debug,感觉我这个方法还是不错的但是很粗鲁,请问有大佬知道一些别的方法么?还请指教。
通过实现continue,不断进行断点调试debug,感觉我这个方法还是不错的但是很粗鲁,请问有大佬知道一些别的方法么?还请指教。




























![vue2(vue-cli3x[vue.config.js])使用cesium新版(1.117.0)配置过程](https://img-blog.csdnimg.cn/direct/1054f895487744fca33e11fbd6467b03.png)