工业相机基础知识
1.相机Binning(图像读出模式)功能:将相邻的几个像素合并成一个像素,其优点如下:1)可提高信噪比至sqr(mn)倍;2)可提高帧速至mn倍;3)可提高像素响应度。
2.相机芯片中定义1英寸=16mm,不等于25.4mm
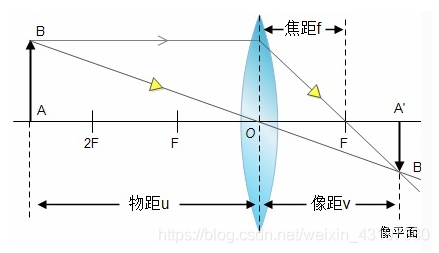
3.相机的作用及基本成像过程:通过光电反应将光信号转换为电信号(电流/电压),进而存储以获得图像。基本成像过程:1)光电转换(将入射光信号转化为电信号);2)电荷收集(以一定形式的收集并存储代表入射光能量的电荷信号);3)信号转换与输出(CCD以模拟信号的形式输出,CMOS直接输出数字信号)。
4.相机满阱容量:单个像元所能存储的最大光电能量(不向相邻像素溢出)。相机像元尺寸越大,能接收到的光子能量就越多,则相机的满阱容量越大。
5.相机芯片主要参数:
1)像元尺寸:指相机上单个像元的实际尺寸。在某种程度上,像元尺寸的大小代表了芯片对光的响应能力,单个像元越大,能接受到的光子就越多。
2)灵敏度:在一定光谱范围内,单位曝光量下的输出电压(电流)信号。在某种程度上,它代表了芯片光电转换的能力。
3)坏点数:在不影响成像效果的基础上,相机的像素点所能允许被破坏的比例。这是衡量相机芯片质量的重要参数。
4)光谱响应:指芯片对不同波长光线的响应能力,通常由光谱响应曲线给出。光谱响应曲线的横轴一般是光线的波长范围,纵轴是芯片对给定波长单位辐射量下的响应度。
6.相机主要参数:
1)相机分辨率:相机中的一个像元在实际视场中表示的距离。区分于相机的空间分辨率,即水平像素数量×垂直像素数量。
2)相机采集速度(帧频/行频):一般来说,面阵相机的采集速度用帧频来表示,其单位是fps(frame per second),如30fps代表1秒钟最多能采集30幅图像,线阵相机的采集速度用行频来表示,其单位是kHz,如12000kHz代表1秒钟最多能采集12000行数据。有时后,相机需要对运动的物体拍照,这就要求相机的采集速度足够高。
3)相机的噪声:在实际成像过程中不希望被采集到的信号。
4)相机信噪比:相机信号与噪声的比值。一般来说&#