一、自适应滤波器
自适应滤波器是一种能够自动调整其滤波参数以匹配输入信号特性变化的滤波器,主要用于信号处理中选择性地通过特定频率范围内的信号,同时抑制其他频率成分。自适应滤波器主要有几种:
LMS (Least Mean Squares) 自适应滤波器:
优点:算法简单,易于实现,计算复杂度相对较低,适合实时应用。
缺点:在高斯噪声环境下表现良好,但在非高斯噪声或有色噪声中性能受限,且收敛速度受步长因子影响,选择不当可能导致滤波效果不佳或不稳定。
应用场合:通信系统中的信道均衡、语音和音频处理、噪声抑制等。
RLS (Recursive Least Squares) 自适应滤波器:
优点:具有较快的收敛速度和较高的稳态精度,对参数变化速度快的系统适应能力强。
缺点:计算复杂度高,实时性要求较高的场合可能会遇到计算资源受限的问题。
应用场合:需要快速跟踪参数变化的场合,例如高速通信系统、雷达信号处理等。
自适应卡尔曼滤波器:
优点:在存在噪声和不确定性的情况下,能提供最优估计,适合处理动态系统的状态估计问题。
缺点:算法较为复杂,需要了解系统的动态模型,且在高维系统中计算负荷较大。
应用场合:航空航天导航、机器人定位、金融市场的预测等领域。
基于神经网络的自适应滤波器:
优点:能够处理非线性问题,具有很强的学习和泛化能力。
缺点:训练过程可能较长,对初始条件敏感,且在网络结构设计和训练算法选择上要求较高。
应用场合:复杂信号处理、非线性滤波、图像处理等领域。
在实际应用中,选择哪种类型的自适应滤波器主要取决于具体的工程需求,包括信号的特性、系统的动态变化速度、实时性要求、可用计算资源以及对滤波器性能的要求等。例如,在无线通信系统中,LMS滤波器可用于信道均衡以补偿无线信道带来的频率选择性衰落;在生物医学信号处理中,自适应卡尔曼滤波器可用于心电信号去噪等任务。
二、各类型的关联
上述提到的 LMS、RLS、自适应卡尔曼滤波器 以及 基于神经网络的自适应滤波器,它们都可以用来设计和实现自适应滤波器的功能。在实现自适应滤波器时,这些算法被用来动态调整滤波器的系数,以使得滤波器的频率响应能够自动适应输入信号的变化,以带通滤波器为例,特别是在带通滤波器的中心频率和带宽等方面的调整。
关联性体现在:
通用性:这些算法都是自适应信号处理领域的通用工具,可以应用于不同类型和结构的滤波器设计中,包括但不限于带通滤波器。
参数调整:无论是LMS算法通过最小化均方误差更新滤波器系数,RLS算法利用递归算法快速更新滤波器权重,还是自适应卡尔曼滤波器结合了信号预测与滤波特性进行状态估计,或者是基于神经网络的自适应滤波器利用神经网络的学习能力来优化滤波器参数,它们都能帮助自适应带通滤波器根据实际输入信号实时地调整滤波参数。
应用场景:无论选择哪种算法实现自适应带通滤波器,其目的都是为了更好地过滤出感兴趣的频率成分,同时在复杂环境或信号特性变化的情况下维持良好的滤波性能。例如,在无线通信、声纳信号处理、电力系统谐波检测、生物医学信号分析等领域都有广泛应用。
简而言之,上述算法是实现自适应滤波器背后的关键技术手段,它们通过各自独特的优化策略和更新机制,使滤波器能够适应不同场景下的信号处理需求。
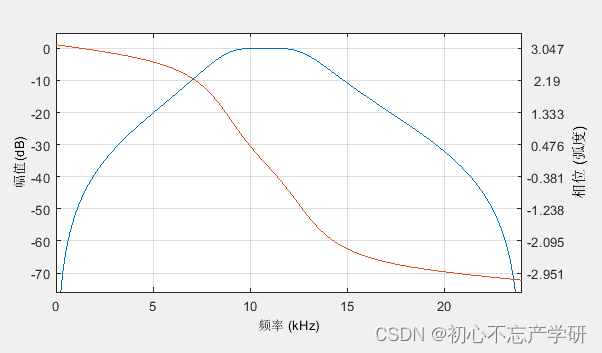
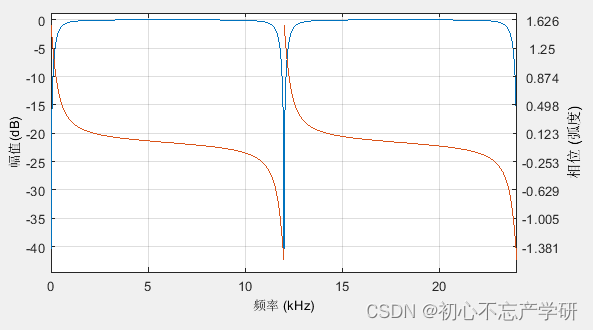
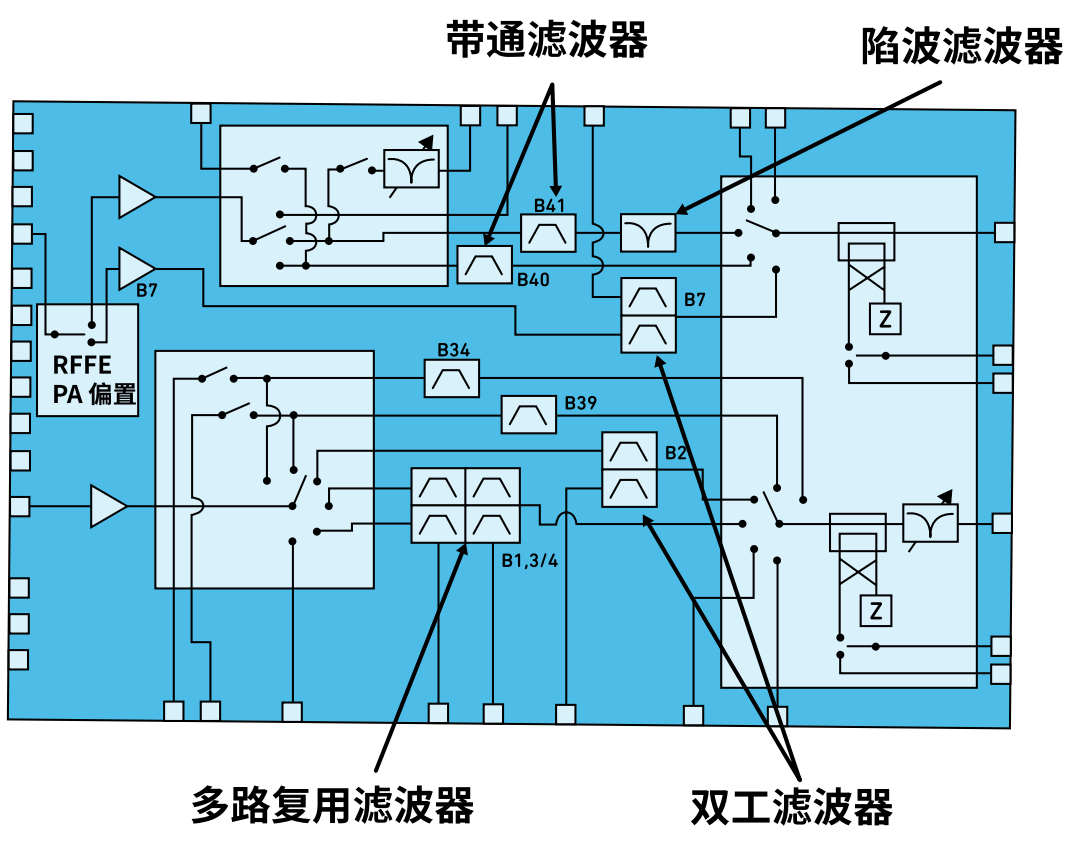
三、带通带阻陷波
在电机控制领域,有很多种磁链观测器或者反电势电压观测器的本质上可以等效为一个自适应的带通滤波器或者带阻滤波器,而陷波滤波器在伺服驱动器中也被广泛应用于多个谐振点的抑制。在伺服驱动系统中,带通滤波器可以应用于位置、速度或电流环路的传感器信号处理,过滤掉无关的低频波动和高频噪声,保留有用信号,确保控制系统能够准确、快速地响应。在伺服驱动系统中,带阻滤波器可以消除机械共振频率,这对于精密伺服系统至关重要,因为机械结构的自然频率可能会与电机或控制器的某些频率相互作用,造成不稳定现象。通过设置陷波滤波器在特定频率范围内衰减信号,可以避免系统在此频率下振荡。陷波滤波器也可以用于抵消由编码器反馈回路、电缆传输或系统内部产生的特定频率的噪声,如电机轴承振动产生的特定频率噪声。
在上述观测器中,直接使用最终估计出的电机运行频率作为等效带通滤波器的中心频率,从而实现了自适应带通滤波器的效果。注意此类滤波器假设了在滤波周期内电机运行频率为已知量且为常量。然而实际上直接根据此类带通滤波器的输出信号的频率来实时计算并调整滤波器系数的方法在某些情况下可能会引入稳定性问题。原因在于,这样做实质上是创建了一个带有反馈的动态系统(会引入了新的稳定性问题),滤波器系数的变化会影响系统的闭环响应特性。
在控制系统或信号处理领域,反馈系统稳定性是一个至关重要的考量因素。实时调整系数可能引发以下问题:
闭环不稳定:如果调整系数的算法不当,可能会导致系统的闭环响应变得不稳定,出现振荡或发散。
时滞效应:实时计算输出频率并调整系数的过程中,存在时滞,时滞可能会破坏系统的稳定性,特别是对于快速变化的信号。
频率自适应性问题:如果输出频率受到噪声、干扰或信号本身快速变化的影响,基于输出频率直接调整系数可能会导致滤波器参数反复跳跃,无法达到稳定滤波效果。
参数振荡:如果系数更新的速度太快或者太慢,可能会引起参数振荡,不利于滤波性能的稳定和精确。
滤波器系数初值问题:由于初始状态无法获取滤波器的输出频率,这等于是滤波器系数初值未知,且不同的初值可能仅适用于单一的工况条件。
在实际应用中,自适应滤波器通常采用专门的自适应算法(如LMS、RLS等),这些算法在设计时已经考虑到系统的稳定性,并通过迭代调整系数来逐步逼近期望的滤波效果。相较于直接基于输出信号频率调整系数,这些算法在处理动态环境和保持系统稳定性方面更有优势。当然,在某些特定应用中,如果能确保基于输出频率调整系数的方法不会破坏系统稳定性,也是可行的,但这需要精心设计和严格的分析验证。且尽量保证自适应的机制不止单纯依赖于上述带通滤波器,即该自适应的中心频率可以结合滤波器输出频率和电机模型数学表达式进行实时计算,来保证系统的稳定性。

























![Paddle Graph Learning (PGL)图学习之图游走类deepwalk、node2vec模型[系列四]](https://img-blog.csdnimg.cn/img_convert/9fd227df9920ef5a73cea4e65eb6c05c.jpeg)