随着软体机器人技术的发展,触觉感知在人机安全交互、可穿戴设备和医疗器械领域发挥着重要作用。如何用简单的系统集成更多的触觉感知、获取更多交互信息面临着诸多挑战。
近日,清华大学国际研究生院曲钧天助理教授团队在国际期刊Advanced Intelligent Systems上发表以“A Bioinspired Robotic Finger for Multimodal Tactile Sensing Powered by Fiber Optic Sensors”为题的研究性论文。该工作从啮齿动物胡须和人类指尖的触觉感知机制中汲取灵感,结合分布式光纤传感技术,提出了一种具有仿生触须和毛发状结构的多模态触觉感知软机器手指,该软体手指不仅能够实现对物体触碰状态、接触力、表面粗糙度、物体硬度、接触位置等的感知,还能灵巧无损地抓取易碎物体和水下透明物体。曲钧天助理教授为独立通讯作者,清华大学博士生毛百进、硕士生周坤钰和向喻遥岑为论文的共同第一作者。
论文信息:
A Bioinspired Robotic Finger for Multimodal Tactile Sensing Powered by Fiber Optic Sensors
Baijin Mao, Kunyu Zhou, Yuyaocen Xiang, Yuzhu Zhang, Qiangjing Yuan, Hongwei Hao, Yaozhen Chen,Houde Liu, Xueqian Wang, Xiaohao Wang, juntian Qu*
Advanced Intelligent Systems
https://doi.org/10.1002/aisy.202400175
01
研究背景
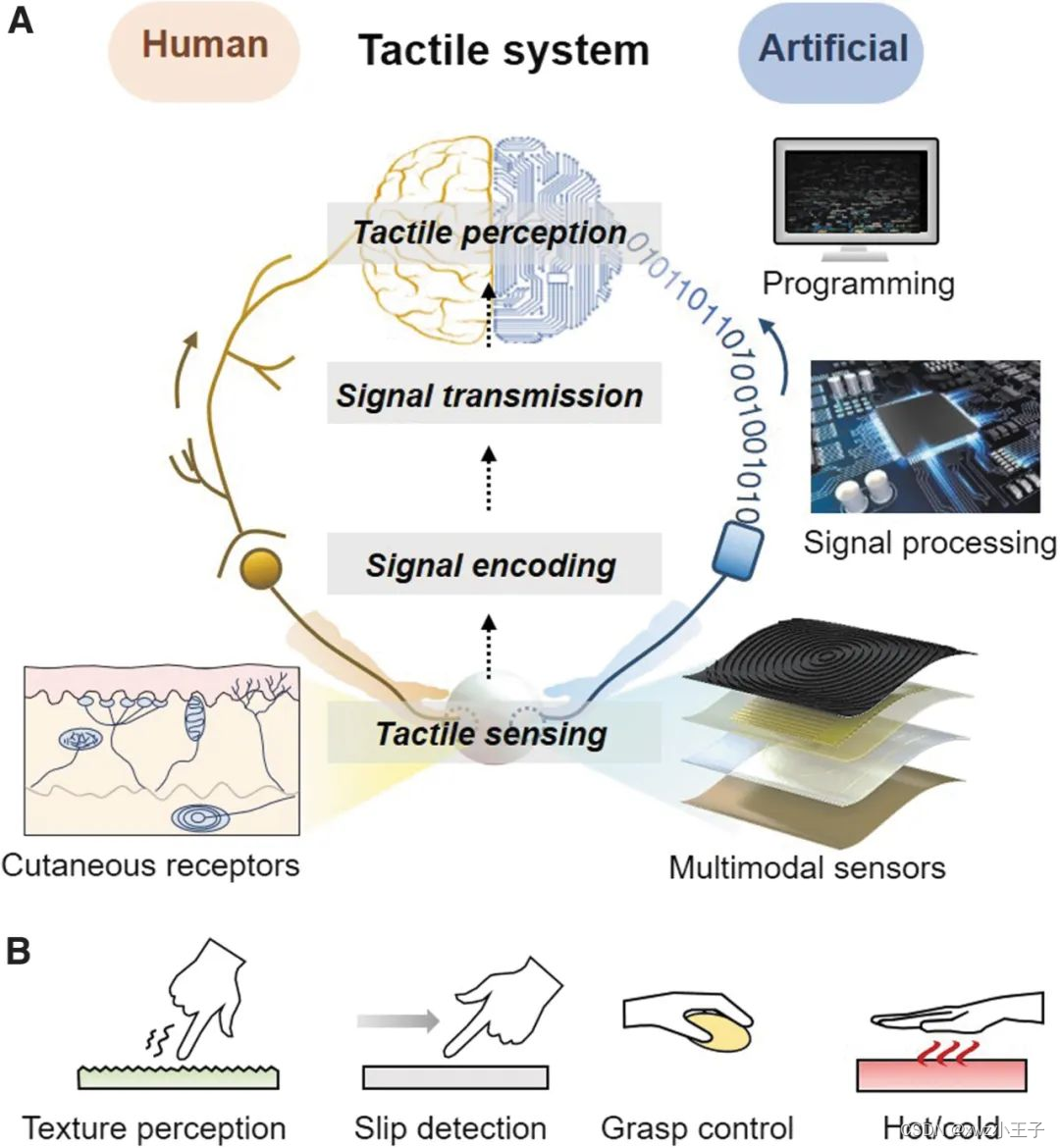
图1 | 触觉感知的机制和过程
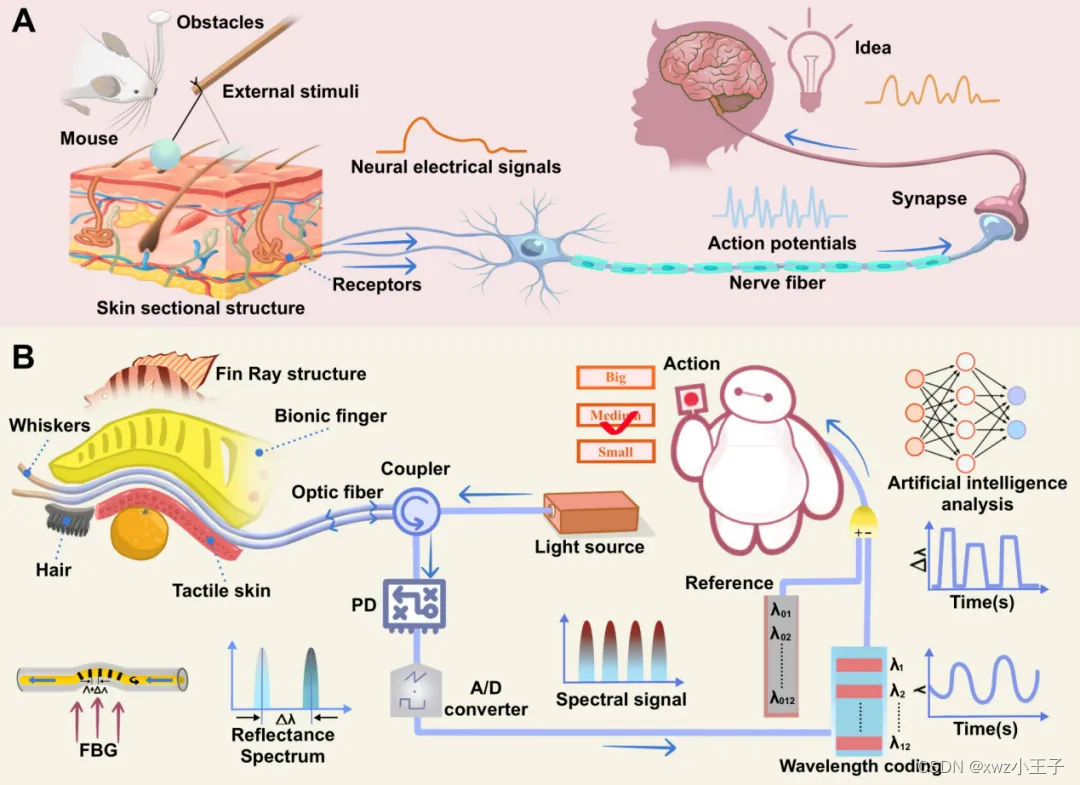
软机器人技术的快速发展凸显了触觉感知日益增长的重要性。目前,大多数用于软体机械手的触觉传感技术依赖于单个传感器或多个触觉传感器阵列。然而它们提供的触觉感知信息有限,限制了全面触觉反馈的能力。除此之外,现有的触觉感知系统表现出相对较低的集成水平,并且容易受到电磁干扰,从而降低了触觉感知的精度。胡须作为啮齿类动物的主要触觉感觉器官,具有高灵敏度和灵活性,可实现复杂环境的导航;人类指尖皮层下含有各种感觉感受器和神经元,它们相互配合可以准确地感知来自外部物体的接触和压力。因此,课题组从啮齿动物胡须和人类指尖的触觉感知机制中汲取灵感(如图1),利用光纤传感器的分布式传感优势模拟了触觉感知神经系统,提出了一种具有仿生触须和毛发状结构的多模态触觉感知软机器手指,以实现对多种模态的触觉感知(图2)。

图2 | 多模态触觉感知识别概览
02
文章概述
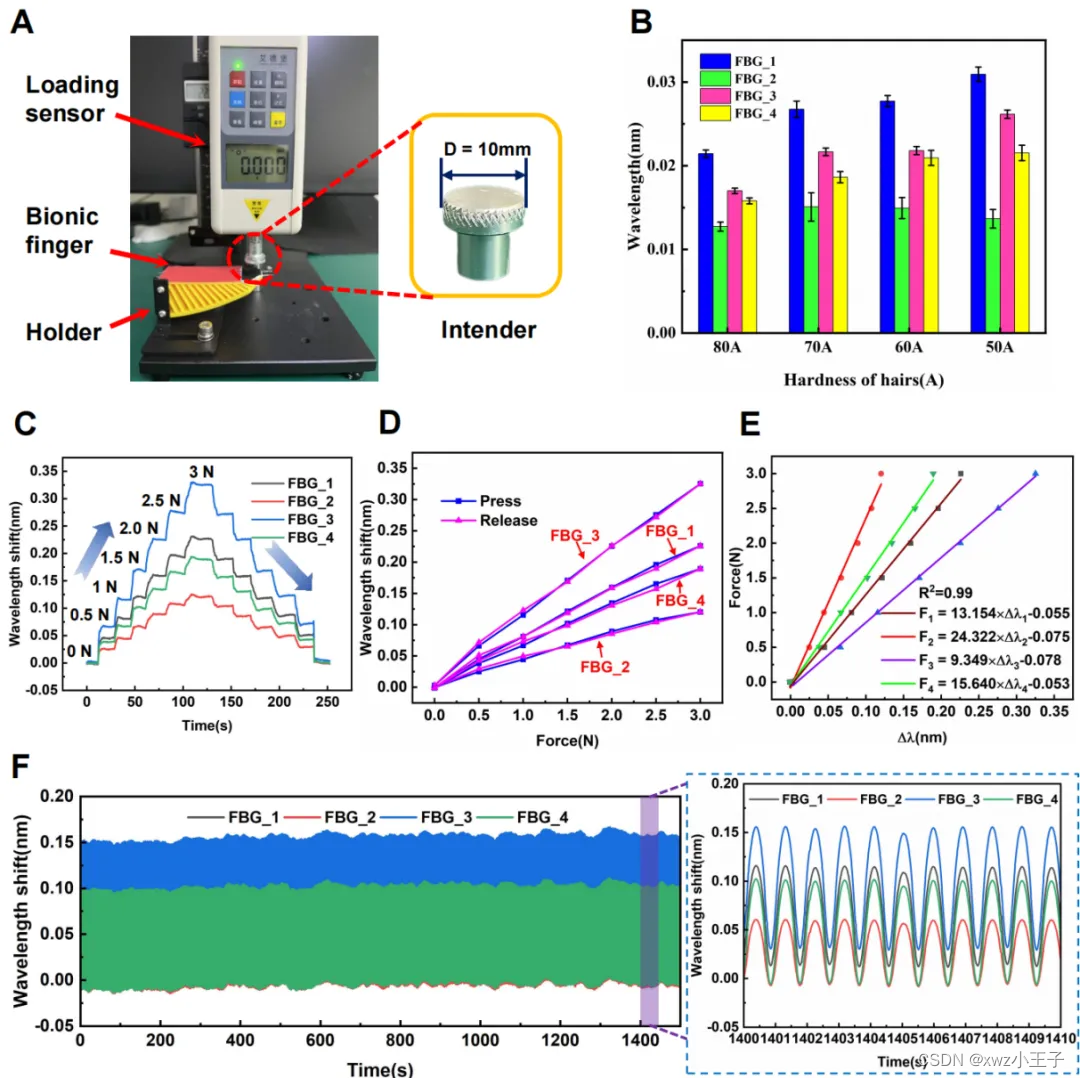
具有触觉感知的软体机械手,可以收集各种触碰交互信息,这对人机交互、可穿戴设备和机器人的灵巧操作至关重要。然而,大多数具有触觉感知能力的软握手的触觉感知模式有限,限制了它们的灵活性和安全性。此外,现有的触觉系统复杂度较高,导致其感知信号的稳定性较差。受多种生物体触觉机制的启发,课题组提出了一种多模态触觉感知软机器人手指。该手指基于改进的鳍射线结构,利用分布式光纤传感系统作为其触觉感知神经模拟了人类手指的触觉能力,可以识别低至0.01 N的接触力,具有可观的灵敏度(106.96 mN/nm)(图3)。
图3 | 手指力感应特性
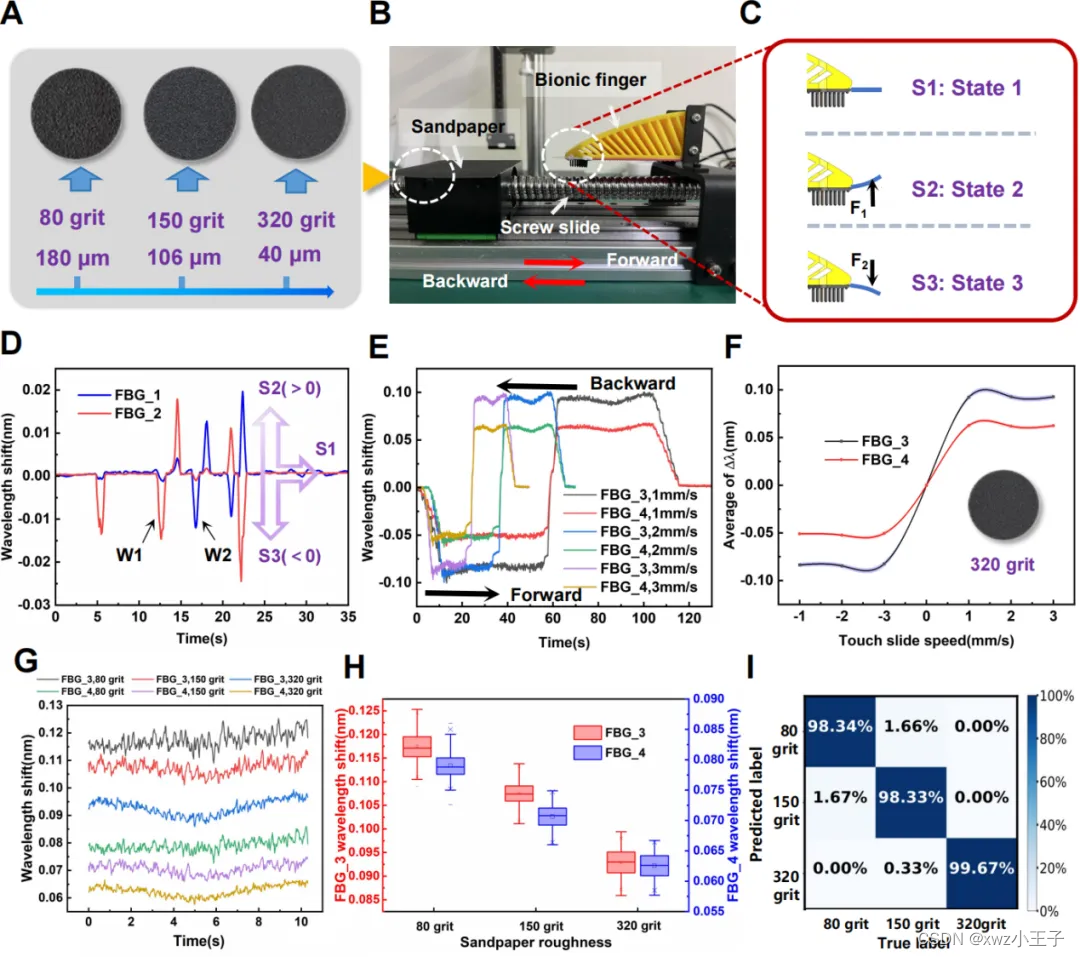
如图4所示,我们利用悬臂梁模型设计了长度约为10mm,直径1mm的仿生触须,该触须能识别三种不同触碰方位以及辨别触碰强度,真实的还原了啮齿类动物的主要触觉感觉器官。该软体机械手指尖在不同粗细的砂纸表面上滑动时,可以有效区分砂纸的不同目数及滑动方向,在神经网络CNN模型下的识别精度可达98.78%。
图4 | 触须感知和粗糙度识别
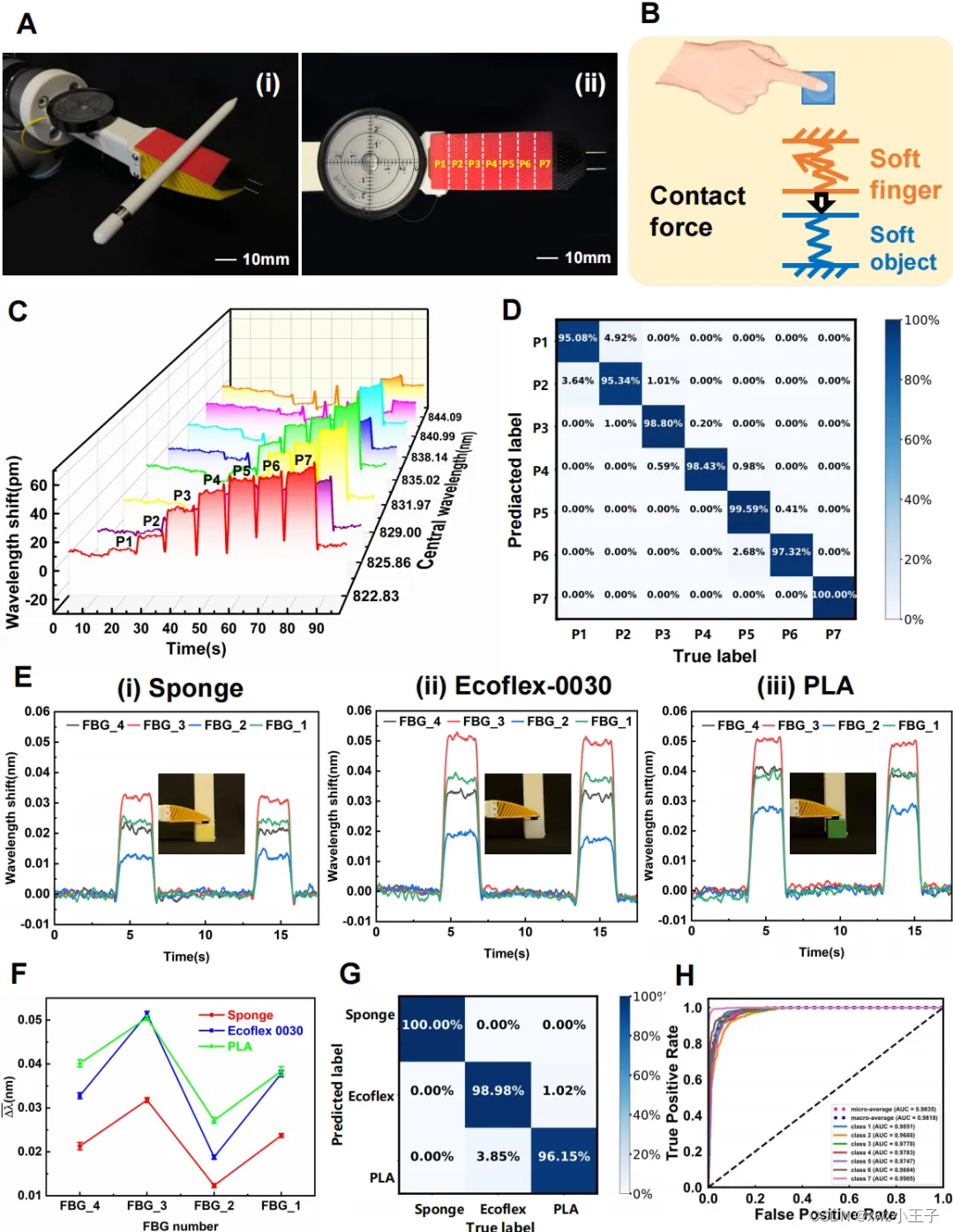
该仿生手指具有模拟人手指腹定位能力(视频1)以及对不同刚度材料的识别能力(视频2),通过建立卷积神经网络模型,对指腹位置识别和刚度识别的准确度分别可达97.79%和98.38%(图5)。不仅如此,该手指构成的二指平行软体机械手对不同曲率半径的橘子具有较高的识别能力(96%),有望在农业的无损采摘和分类中发挥重大作用。
图5 | 手指腹定位与材料刚度识
视频1 指腹位置识别
视频2 不同材料的刚度识别
我们将多模态触觉感知手指集成到二指平行抓手上, 通过其仿生触须的触碰感知控制和0.01N的力反馈精度实现了对脆弱物体(薯片(1g)、草莓(10g)、蓝莓(3.6g))的无损抓取(视频3)。
视频3 脆弱物体抓取
针对水下浑浊环境下的透明物体抓取任务,传统的视觉感知抓取方案已无法胜任该项抓取工作。然而,通过多模态触觉感知的协同作用,软体机械手可以轻松的完成水下透明物体的抓取(视频4),首先利用触须的触碰状态感知透明物体的方位,然后根据指腹的定位能力确定手指的最佳抓取位置,最后根据恒定波长力反馈实现对水下透明物体的无损抓取。
视频4 水下透明物体抓取
03
主要创新点
1、受自然世界中触觉感知机制的启发,我们有机融合了触觉感知机制、仿生结构和光纤感知系统,提出一种具有仿生触须和毛发的柔软机器人手指;
2、该新型仿生触须软机器人手指集成了多模态触觉感知能力,模拟了老鼠触须和人体指尖的触觉功能,实现了触碰方位感知、接触力感知、表面粗糙度感知、接触位置感知和材料刚度识别等;
3、利用仿生手指的多模态触觉感知协同作用,轻松实现对易碎物体的无损操纵,除此之外,针对水下非结构化环境,成功实现了对水下透明物体的探测与抓取,从而说明了其在不同应用领域的巨大潜力。