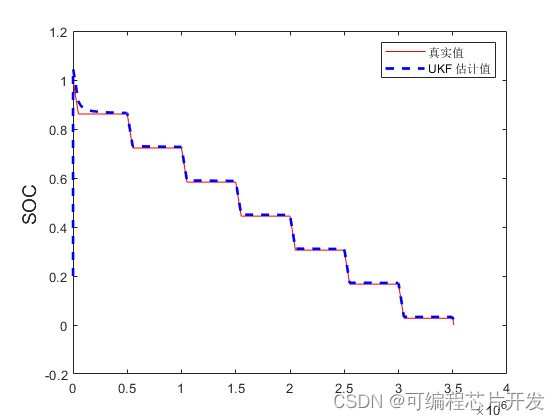
在MATLAB中实现扩展卡尔曼滤波(Extended Kalman Filter, EKF)时,误差估计是一个关键步骤。EKF是一种用于非线性系统状态估计的算法,它通过线性化非线性系统模型,并利用卡尔曼滤波的框架进行状态估计和误差估计。以下是在MATLAB中使用EKF进行误差估计的详细步骤和要点:
- 初始化
设定初始状态估计值:根据系统特性设定初始状态向量x_est。
设定初始误差协方差矩阵:表示初始状态估计的不确定性,通常设为对角矩阵P_est。 - 预测
根据非线性状态转移方程预测下一状态:使用系统的非线性动态模型预测下一个时间步的状态x_pred。
预测误差协方差矩阵:根据系统模型和过程噪声协方差矩阵Q,预测下一个时间步的误差协方差矩阵P_pred。 - 线性化
在预测的状态处线性化非线性方程:使用泰勒级数展开或数值微分方法(如雅可比矩阵)将非线性模型线性化。 - 更新
计算卡尔曼增益:根据预测误差协方差矩阵、观测噪声协方差矩阵R和线性化后的观测矩阵H,计算卡尔曼增益K。
计算观测残差:观测值与根据预测状态计算出的观测值之间的差值。
更新状态估计:利用卡尔曼增益和观测残差更新状态估计值x_upd。
更新误差协方差矩阵:利用卡尔曼增益和线性化后的观测矩阵更新误差协方差矩阵P_upd。 - 误差估计的注意事项
噪声模型:准确设定过程噪声和测量噪声的模型对误差估计的准确性至关重要。
线性化误差:由于EKF是通过线性化非线性模型来工作的,因此线性化过程中会引入误差。当初始状态误差较大或系统模型非线性程度较高时,滤波精度可能会受到影响。
计算复杂性:EKF需要计算雅可比矩阵,这可能会增加计算复杂性并影响系统的实时性。
鲁棒性:在存在模型失配、量测干扰、量测丢失、量测延迟或状态突变等复杂情况时,EKF的鲁棒性可能会受到影响。 - MATLAB实现
在MATLAB中实现EKF时,可以编写自定义函数来执行上述步骤,也可以利用MATLAB提供的工具箱或第三方库来简化实现过程。例如,可以使用MATLAB的Robotics System Toolbox中的extendedKalmanFilter函数来实现EKF。
总结
通过MATLAB实现扩展卡尔曼滤波进行误差估计时,需要关注初始化、预测、线性化、更新等关键步骤,并注意噪声模型、线性化误差、计算复杂性和鲁棒性等因素对误差估计准确性的影响。

























![YOLOv8_obb预测流程-原理解析[旋转目标检测理论篇]](https://img-blog.csdnimg.cn/direct/03ddebdec3124153b1101c6e9606766f.png)