本文简介
本文介绍如何使用CubeMars上位机调试TMotor AK80-8电机,使用MIT控制模式,实现位置/速度/力矩控制,设置CAN地址,等等。
官方的视频教程在b站搜“Cubemars 新手教学视频”,比较啰嗦,而且这个上位机操作很刁钻,所以记录一下。
建立电机-上位机通信
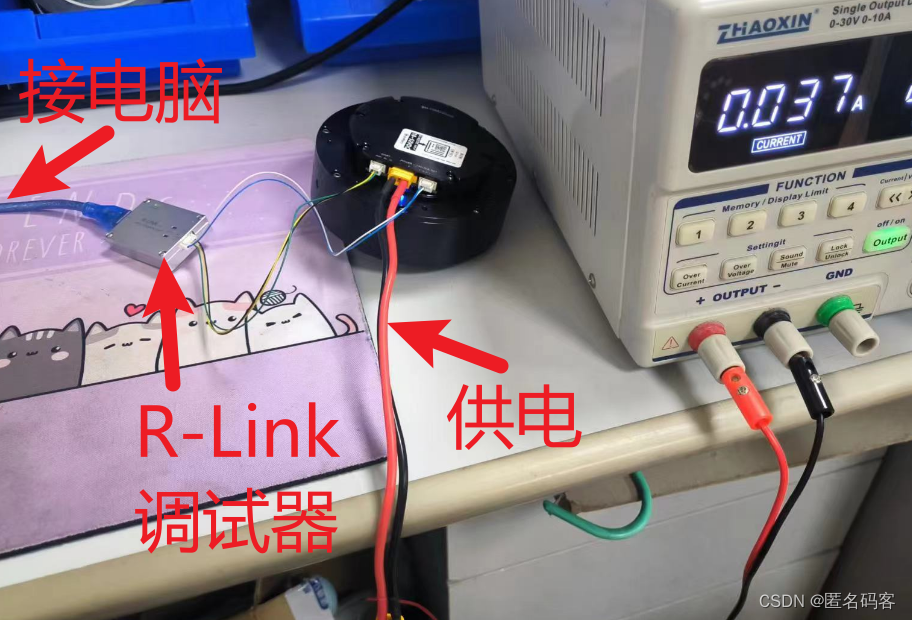
如图,按照 电脑>>R-Link调试器>>电机>>电源的顺序连线。
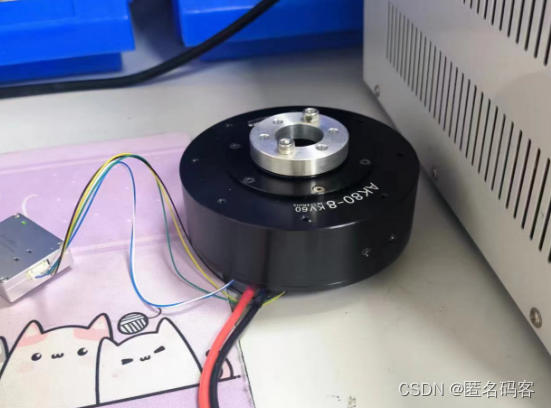
接线完成后,把电机输出轴朝上:
打开Win系统的设备管理器,观察串口号:
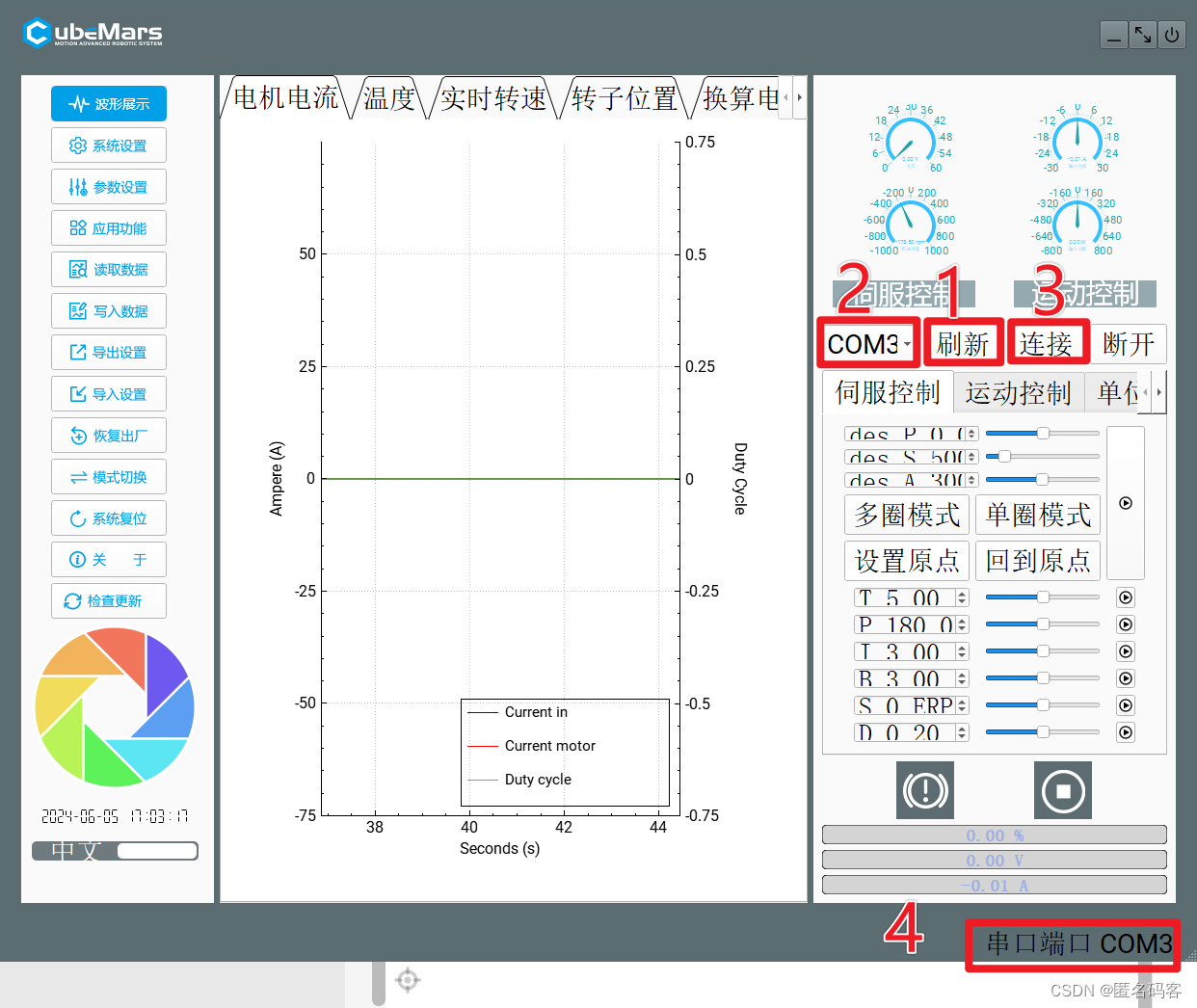
打开客服提供的CubeMars上位机,先点右边刷新,再在下拉列表里选择刚才看到的端口号,再点连接,之后右下角会更新状态文字,连接成功后的页面如下:
设置控制模式和控制参数,包括CAN地址
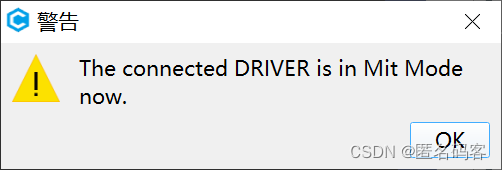
点左边的模式切换,再点中间的“跳转力控”(对应英语的MIT模式),等待几秒钟会弹窗提示“The connected driver is in MIT Mode now”,同时右上角的“运动控制”四个字会变为红色背景。然后在端口号下面打开“运动控制”标签页。

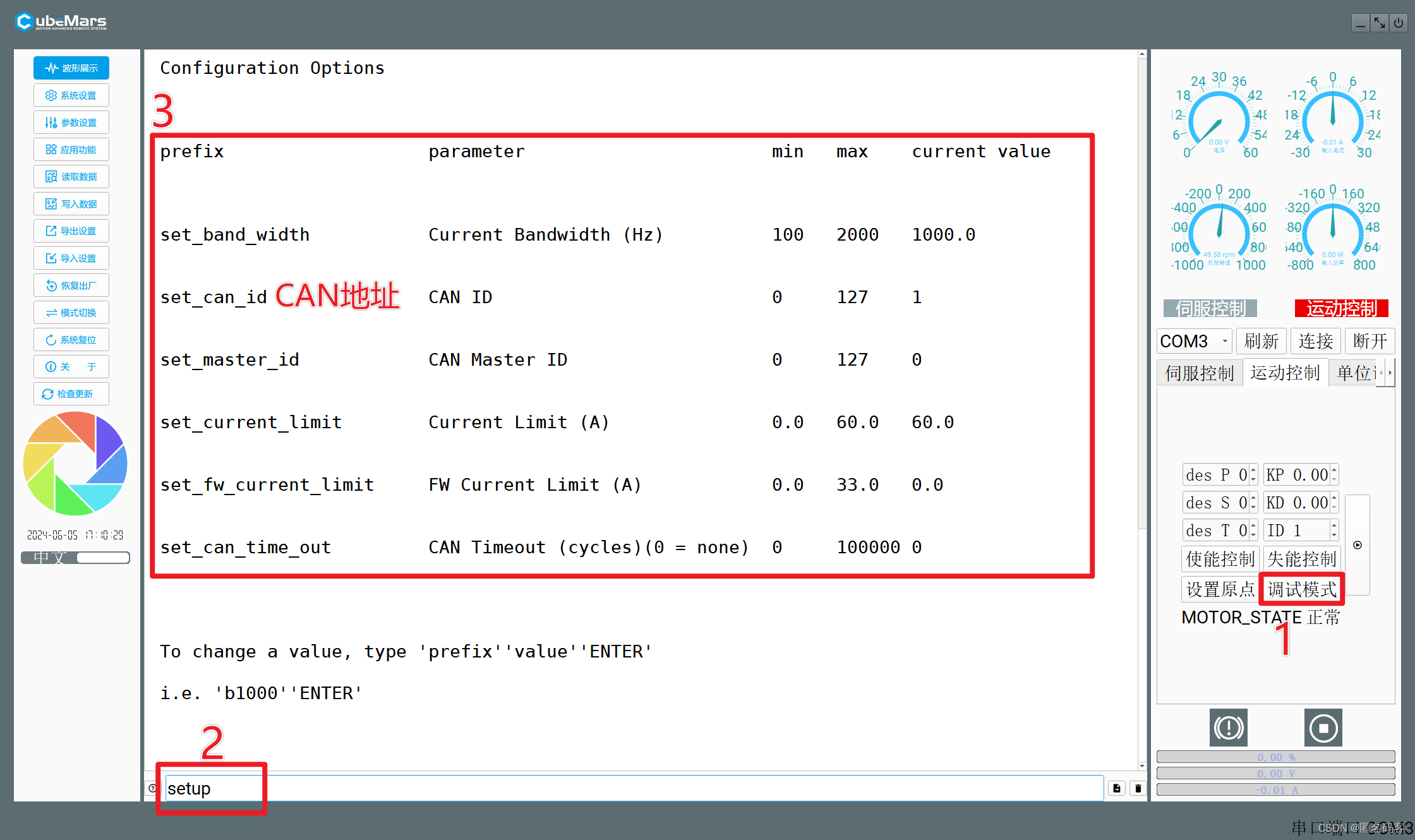
在“运动控制”标签页下面点“调试模式”,然后中部主窗口会显示一个命令交互窗口,在底下输入“setup”命令然后回车,会显示电机参数,其中就包括CAN_ID,即CAN总线的设备地址。
输入“set_can_id 2”命令,回车,然后用鼠标滚轮把终端显示内容拉到最底下,可以看到参数更新了:
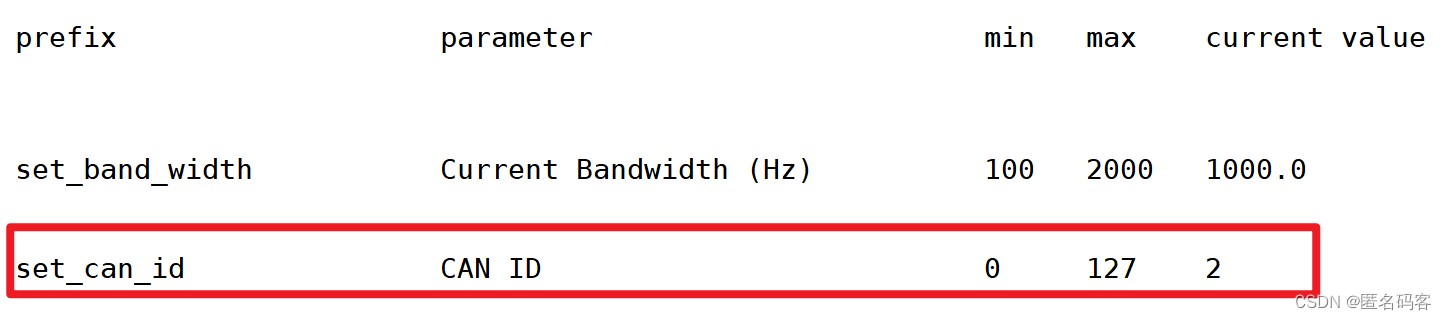
注意别忘了用鼠标滚轮下拉,它是不会自己更新的。
位置/速度/力矩控制
按下图,点“波形展示” >> “转子位置"

依靠右边“运动控制”标签的面板进行控制调试。ID要设置成电机的CAN ID,其他5个参数都设置为0,这时候看中间转子位置,如果不是0则点右边的“设置原点”,让角度为0.
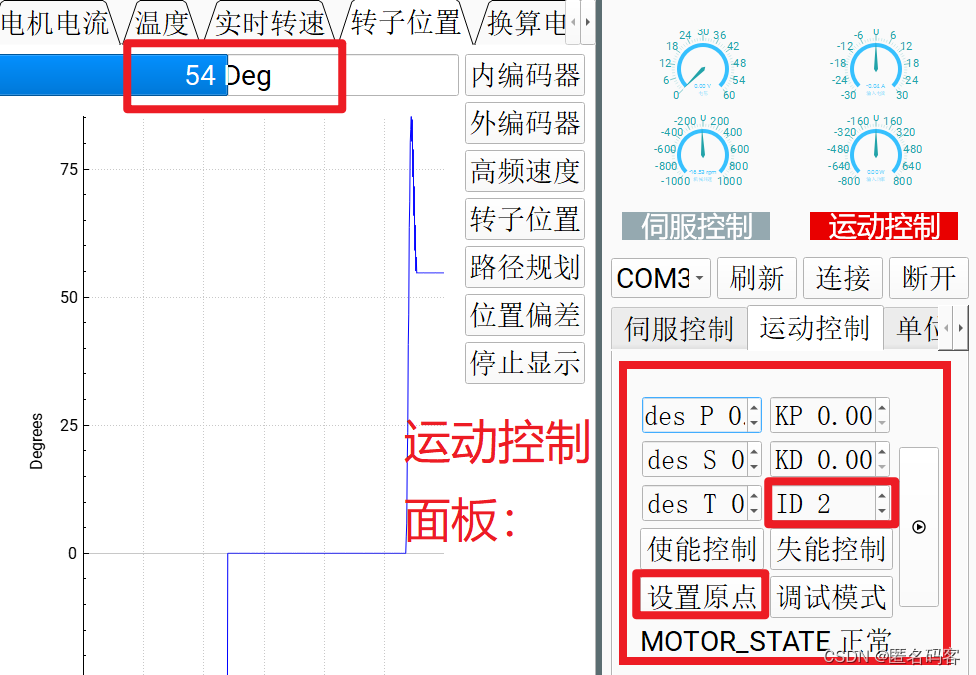
面板操作说明:des P是目标位置(默认单位rad),des S是目标速度,des T目标力矩,KP位置控制增益,KD速度增益。把电机想象成一个汽车,使能控制就是点火,失能控制是熄火,右边带开始图标的按钮是应用左边设置的参数,类似于挂挡。
所以操作流程就是:使能控制 >> 设置控制参数 >> 右边按钮应用参数 >> 失能控制,中间两步可以多次循环。以下位置/速度/力矩控制都按照这个流程,不再重复说明了。
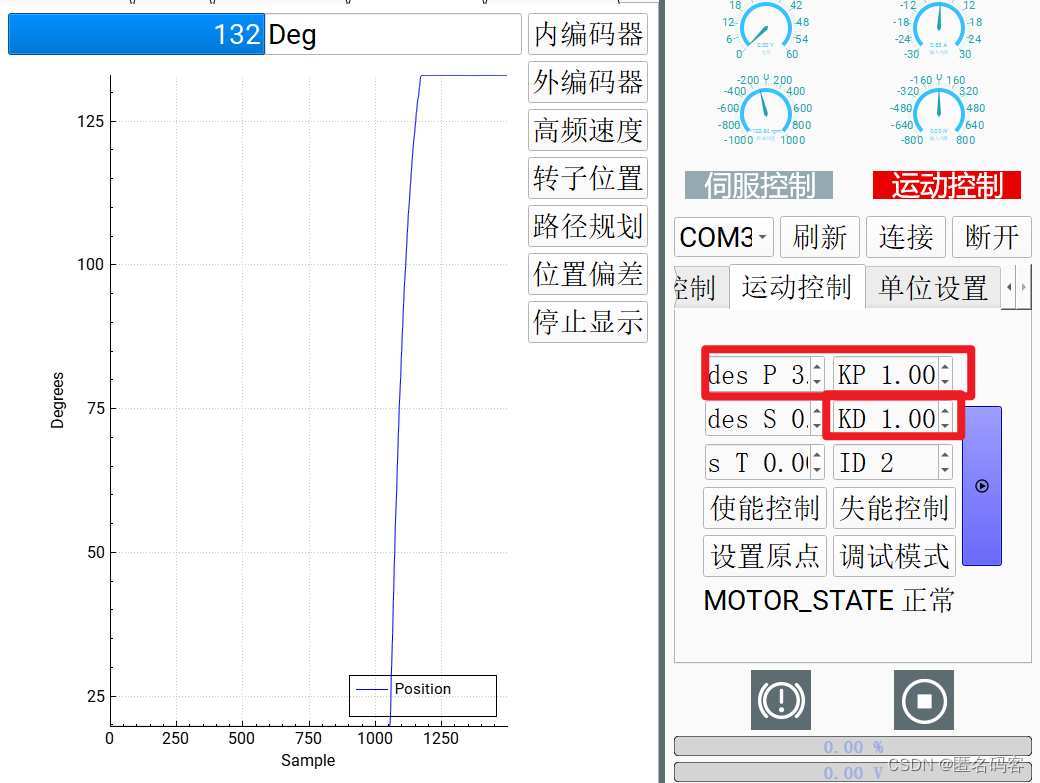
位置控制操作方法按照下图,des P设置成目标角度,KP和KP设置为正数。如果KD=0会超调。
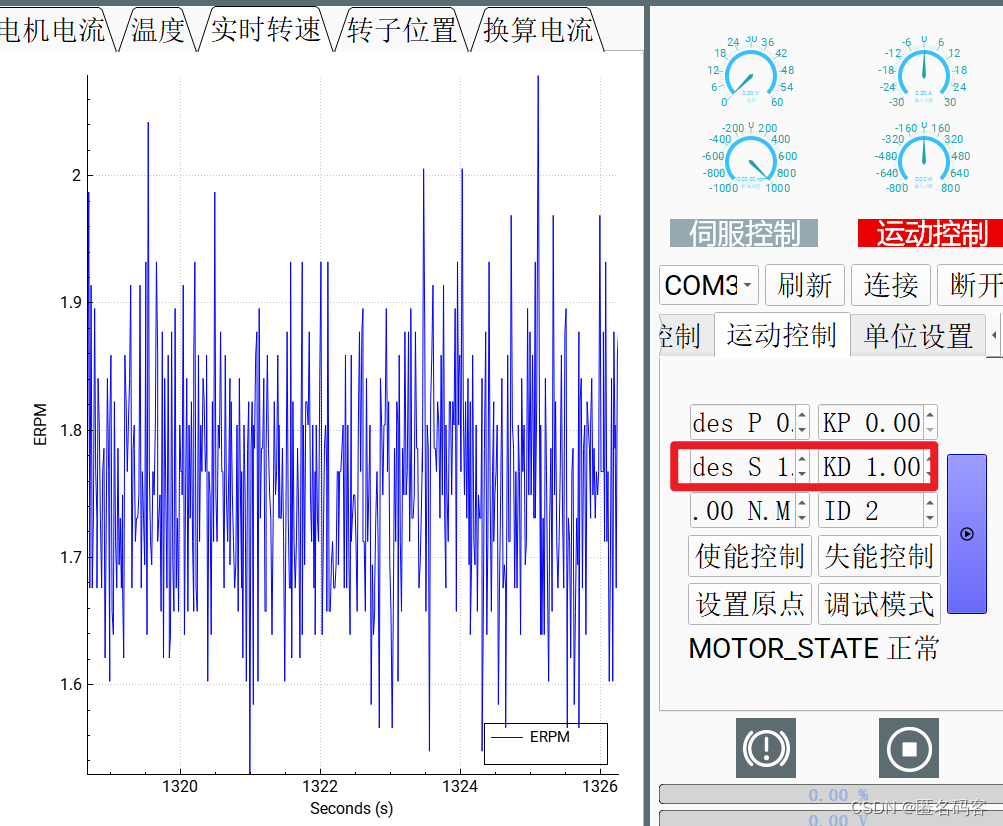
速度控制:des S和KD设置为正数,其他控制参数都要设置为0,应用后电机会匀速转动:
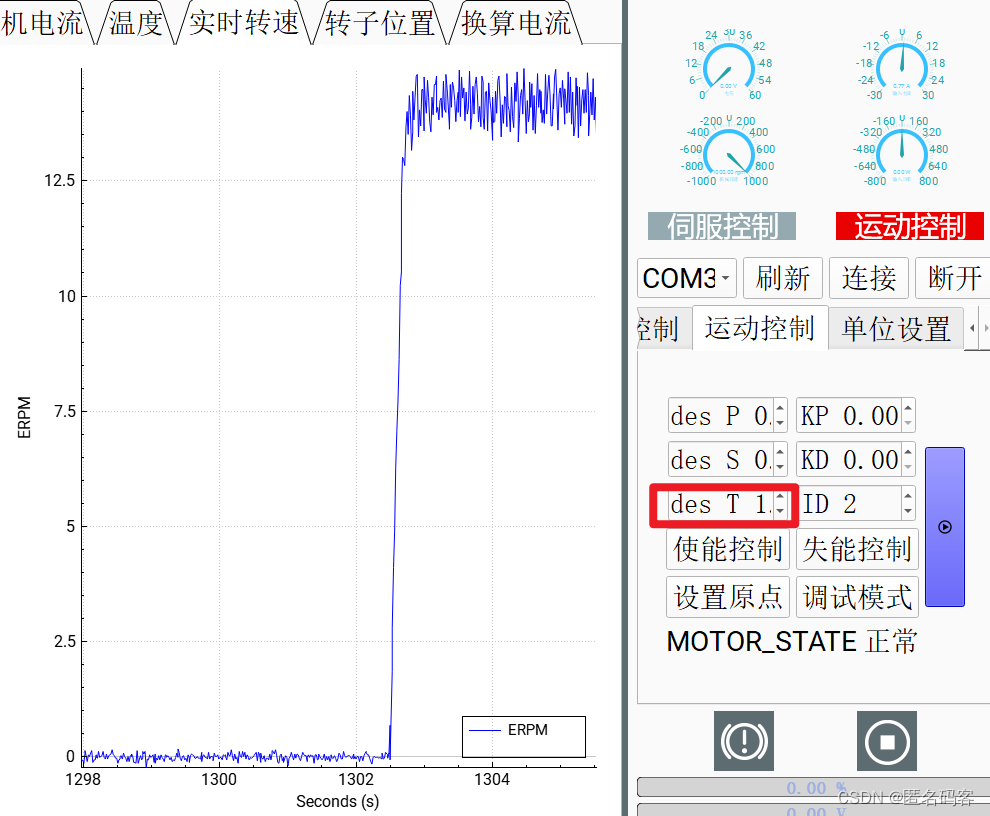
力矩控制:des T设置为正数(小于1Nm可能转不起来),由于电机是空载,转速会比较快。
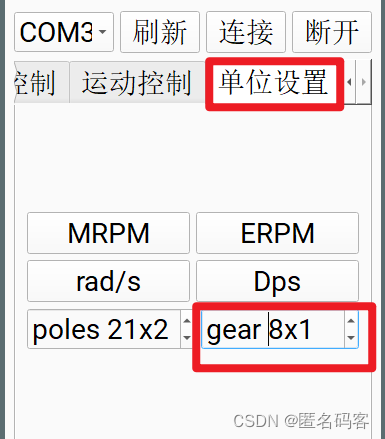
修改减速比:转到“单位设置”标签页,我用的AK80-8是8倍减速比,但是默认是9倍,需要改正。