一、下载Darknet_ros
mkidr -p yolo_ws/src
cd yolo_ws/src
git clone --recursive https://github.com/leggedrobotics/darknet_ros.git
#因为这样克隆的darknet文件夹是空的,将darknet_ros中的darknet的文件替换成如下
cd darknet_ros
git clone https://github.com/arnoldfychen/darknet.git
#进入darknet目录下进行make
cd darknet
make修改darknet文件夹下的Makefile文件

修改 darknet_ros/darknet_ros/CMakeLists.txt
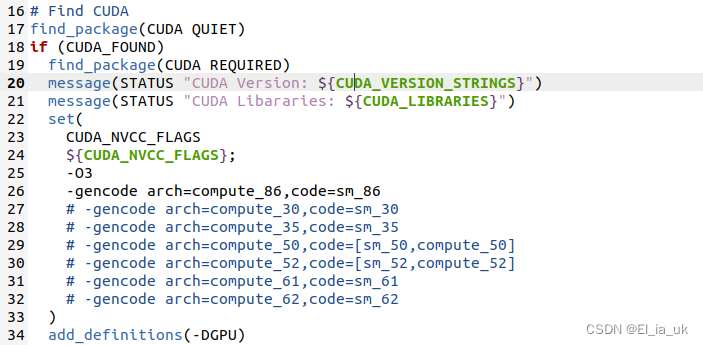
将这算力改成自己电脑的算力
make可能会报如下错误:
一、
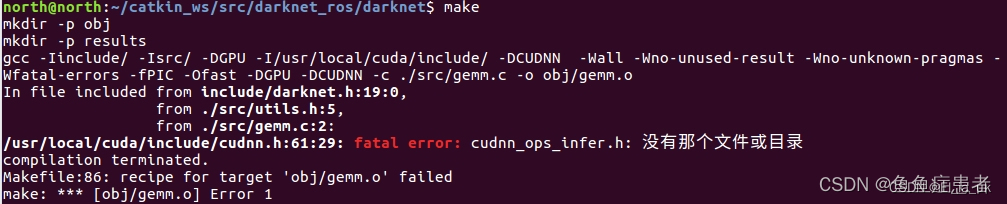
fatal error:cudnn_ros_infer.h:没有那个文件或目录
解决办法:
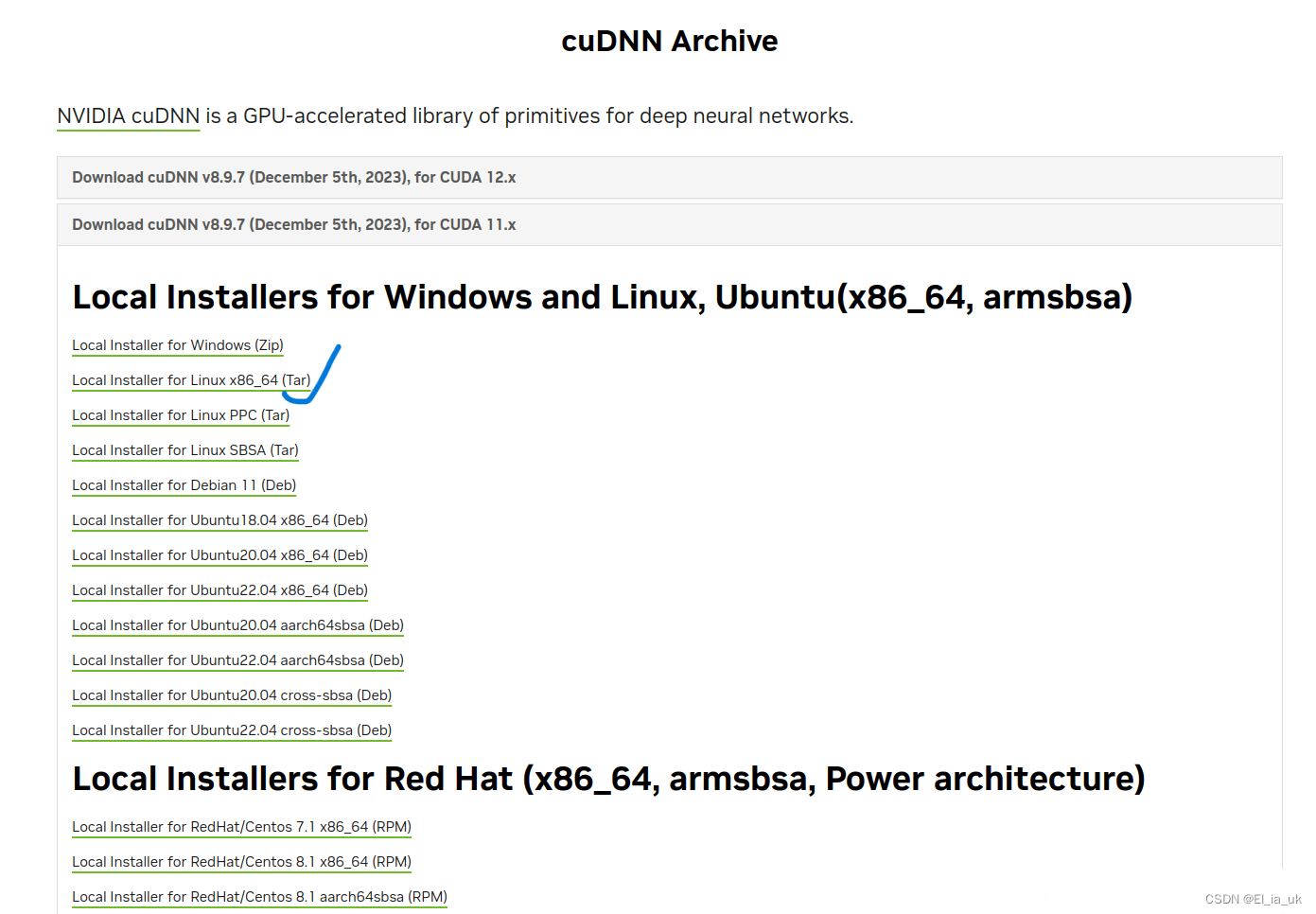
根据官方链接cuDNN Archive | NVIDIA Developer,选择与cuda版本相匹配的cudnn下载tar文件。在这里,我下载的是v8.9.6,可与cuda 12.x等版本适配。
解压cudnn-linux-x86_64-8.9.7.29_cuda11-archive.tar.xz后,进入该目录,将lib内的文件都复制到目录/usr/local/cuda-11.6/lib64/中,将include内的文件都复制到目录/usr/local/cuda-11.6/include/中
cd ./cudnn-linux-x86_64-8.9.6.50_cuda11-archive
sudo cp ./lib/* /usr/local/cuda-12.2/lib64/
sudo cp ./include/* /usr/local/cuda-12.2/include/
二、
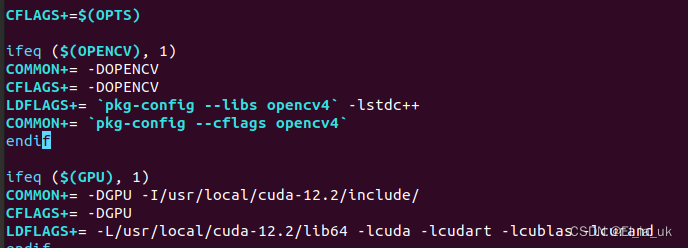
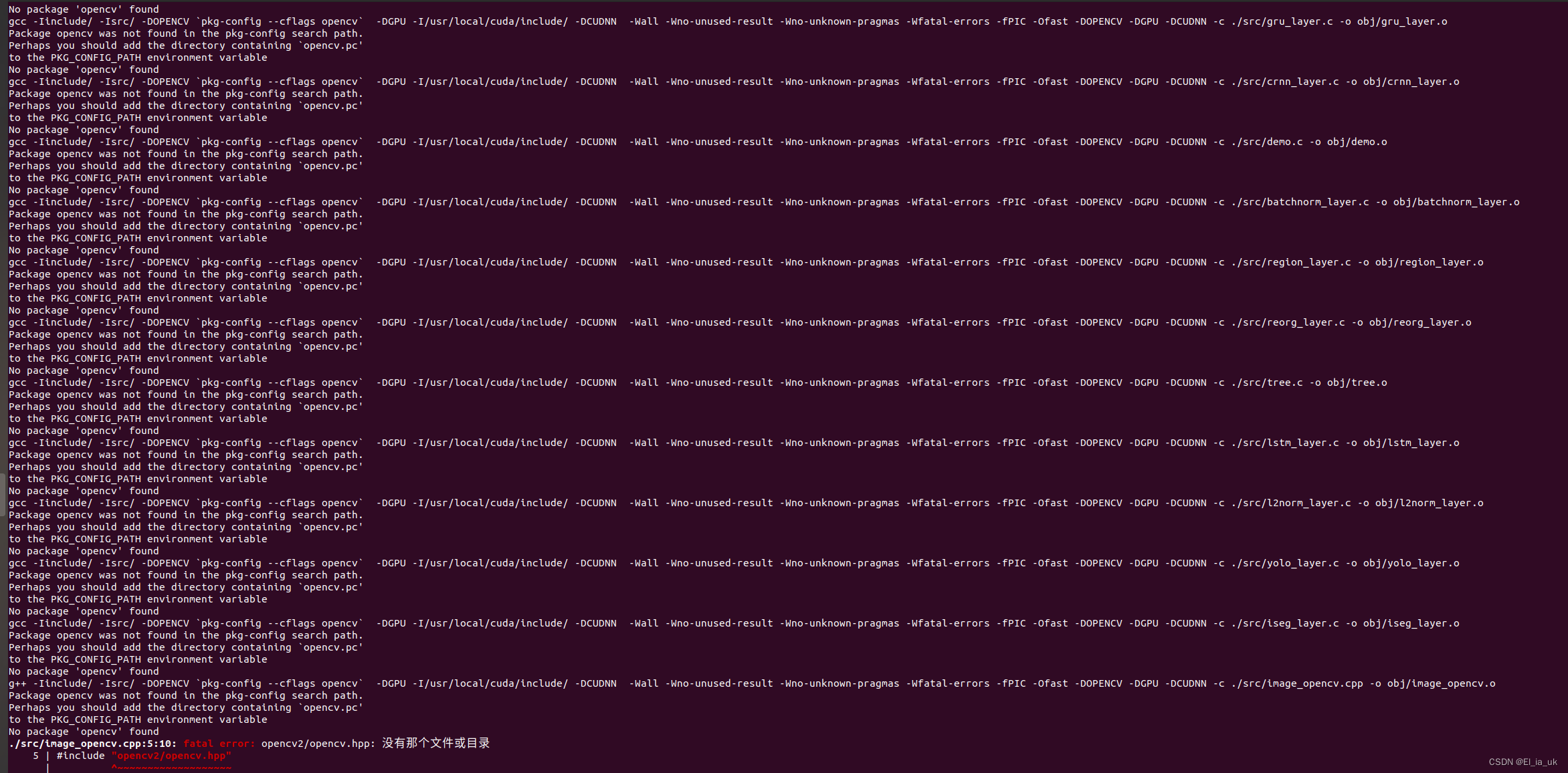 fatal error:opencv2/opencvhpp:没有那个文件或目录
fatal error:opencv2/opencvhpp:没有那个文件或目录
解决办法:修改修改darknet文件夹下的Makefile文件
三、
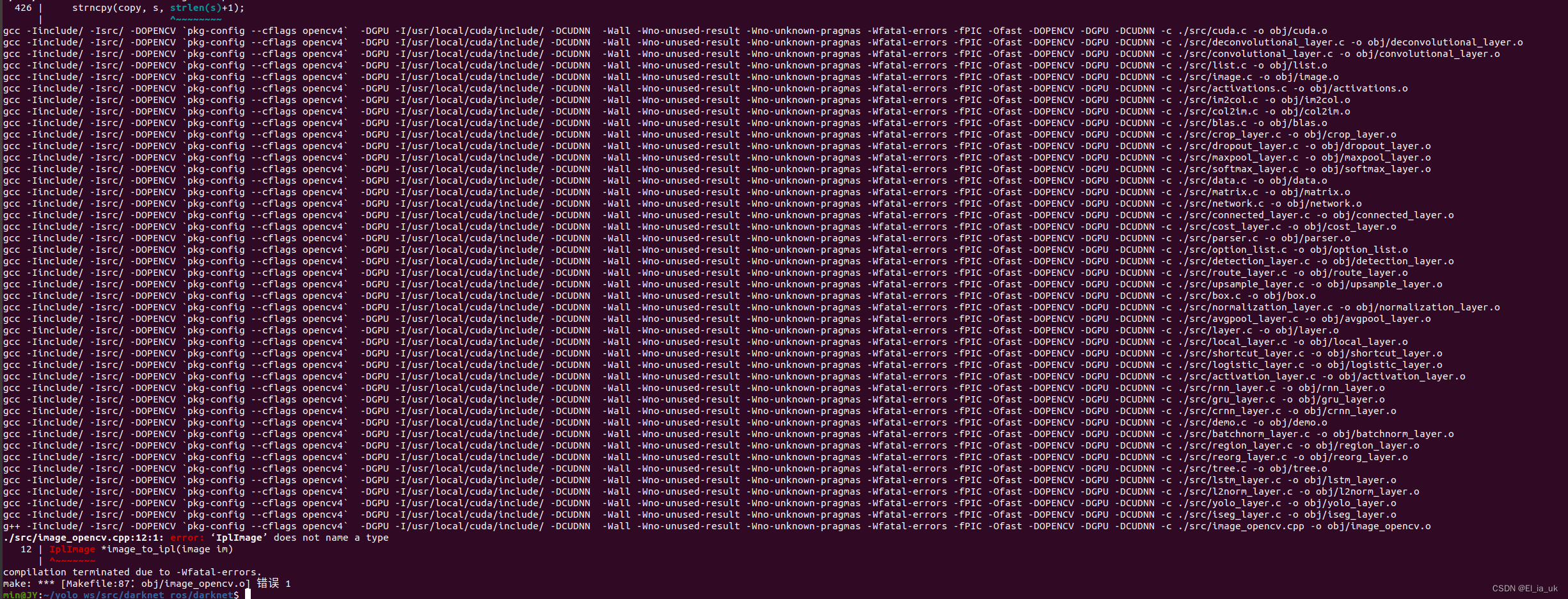
error: ‘IplImage’ does not name a type 12 | IplImage *image_to_ipl(image im)
把 home/darknet/src/imageopencv.cpp 修改如下:
#ifdef OPENCV
#include "stdio.h"
#include "stdlib.h"
#include "opencv2/opencv.hpp"
#include "image.h"
using namespace cv;
extern "C" {
/*IplImage *image_to_ipl(image im)
{
int x,y,c;
IplImage *disp = cvCreateImage(cvSize(im.w,im.h), IPL_DEPTH_8U, im.c);
int step = disp->widthStep;
for(y = 0; y < im.h; ++y){
for(x = 0; x < im.w; ++x){
for(c= 0; c < im.c; ++c){
float val = im.data[c*im.h*im.w + y*im.w + x];
disp->imageData[y*step + x*im.c + c] = (unsigned char)(val*255);
}
}
}
return disp;
}
image ipl_to_image(IplImage* src)
{
int h = src->height;
int w = src->width;
int c = src->nChannels;
image im = make_image(w, h, c);
unsigned char *data = (unsigned char *)src->imageData;
int step = src->widthStep;
int i, j, k;
for(i = 0; i < h; ++i){
for(k= 0; k < c; ++k){
for(j = 0; j < w; ++j){
im.data[k*w*h + i*w + j] = data[i*step + j*c + k]/255.;
}
}
}
return im;
}*/
/*Mat image_to_mat(image im)
{
image copy = copy_image(im);
constrain_image(copy);
if(im.c == 3) rgbgr_image(copy);
IplImage *ipl = image_to_ipl(copy);
Mat m = cvarrToMat(ipl, true);
cvReleaseImage(&ipl);
free_image(copy);
return m;
}
image mat_to_image(Mat m)
{
IplImage ipl = m;
image im = ipl_to_image(&ipl);
rgbgr_image(im);
return im;
}*/
Mat image_to_mat(image im)
{
image copy = copy_image(im);
constrain_image(copy);
if(im.c == 3) rgbgr_image(copy);
Mat m(cv::Size(im.w,im.h), CV_8UC(im.c));
int x,y,c;
int step = m.step;
for(y = 0; y < im.h; ++y){
for(x = 0; x < im.w; ++x){
for(c= 0; c < im.c; ++c){
float val = im.data[c*im.h*im.w + y*im.w + x];
m.data[y*step + x*im.c + c] = (unsigned char)(val*255);
}
}
}
free_image(copy);
return m;
// free_image(copy);
// return m;
// IplImage *ipl = image_to_ipl(copy);
// Mat m = cvarrToMat(ipl, true);
// cvReleaseImage(&ipl);
// free_image(copy);
// return m;
}
image mat_to_image(Mat m)
{
int h = m.rows;
int w = m.cols;
int c = m.channels();
image im = make_image(w, h, c);
unsigned char *data = (unsigned char *)m.data;
int step = m.step;
int i, j, k;
for(i = 0; i < h; ++i){
for(k= 0; k < c; ++k){
for(j = 0; j < w; ++j){
im.data[k*w*h + i*w + j] = data[i*step + j*c + k]/255.;
}
}
}
rgbgr_image(im);
return im;
// IplImage ipl = m;
// image im = ipl_to_image(&ipl);
// rgbgr_image(im);
// return im;
}
void *open_video_stream(const char *f, int c, int w, int h, int fps)
{
VideoCapture *cap;
if(f) cap = new VideoCapture(f);
else cap = new VideoCapture(c);
if(!cap->isOpened()) return 0;
//if(w) cap->set(CV_CAP_PROP_FRAME_WIDTH, w);
//if(h) cap->set(CV_CAP_PROP_FRAME_HEIGHT, w);
//if(fps) cap->set(CV_CAP_PROP_FPS, w);
if(w) cap->set(CAP_PROP_FRAME_WIDTH, w);
if(h) cap->set(CAP_PROP_FRAME_HEIGHT, w);
if(fps) cap->set(CAP_PROP_FPS, w);
return (void *) cap;
}
image get_image_from_stream(void *p)
{
VideoCapture *cap = (VideoCapture *)p;
Mat m;
*cap >> m;
if(m.empty()) return make_empty_image(0,0,0);
return mat_to_image(m);
}
image load_image_cv(char *filename, int channels)
{
int flag = -1;
if (channels == 0) flag = -1;
else if (channels == 1) flag = 0;
else if (channels == 3) flag = 1;
else {
fprintf(stderr, "OpenCV can't force load with %d channels\n", channels);
}
Mat m;
m = imread(filename, flag);
if(!m.data){
fprintf(stderr, "Cannot load image \"%s\"\n", filename);
char buff[256];
sprintf(buff, "echo %s >> bad.list", filename);
system(buff);
return make_image(10,10,3);
//exit(0);
}
image im = mat_to_image(m);
return im;
}
int show_image_cv(image im, const char* name, int ms)
{
Mat m = image_to_mat(im);
imshow(name, m);
int c = waitKey(ms);
if (c != -1) c = c%256;
return c;
}
void make_window(char *name, int w, int h, int fullscreen)
{
namedWindow(name, WINDOW_NORMAL);
if (fullscreen) {
//setWindowProperty(name, CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
setWindowProperty(name, WND_PROP_FULLSCREEN, WINDOW_FULLSCREEN);
} else {
resizeWindow(name, w, h);
if(strcmp(name, "Demo") == 0) moveWindow(name, 0, 0);
}
}
}
#endif
将之前在darknet文件进行make出错的文件删除,再重新编译
sudo make clean
make在工作空间中安装realsense_ros与机械臂启动包
cd yolo_ws
cd src
#安装realsense_ros
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git Universal_Robots_ROS_Driver
git clone -b calibration_devel https://github.com/fmauch/universal_robot.git fmauch_universal_robot
cd ..
catkin_make -DCMAKE_BUILD_TYPE=Release使用VScode 在工作空间的src目录下创建新的文件夹std_msg,并添加相关的依赖:rospy roscpp std_msgs
在std_msg文件中创建scripts文件夹,创建两个py文件
一个为yolo目标检测文件及机械臂运动程序
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from darknet_ros_msgs.msg import BoundingBoxes, BoundingBox
from sensor_msgs.msg import Image, CameraInfo
from cv_bridge import CvBridge
import numpy as np
import tf2_ros
import tf2_geometry_msgs
from geometry_msgs.msg import Point
class Readyolo:
def __init__(self):
rospy.init_node('grasping_node', anonymous=True)
self.bridge = CvBridge()
self.tf_buffer = tf2_ros.Buffer()
self.tf_listener = tf2_ros.TransformListener(self.tf_buffer)
self.rgb_image_sub = rospy.Subscriber('/camera/color/image_raw', Image, self.rgb_image_callback)
self.depth_image_sub = rospy.Subscriber('/camera/depth/image_rect_raw', Image, self.depth_image_callback)
self.camera_info_sub = rospy.Subscriber('/camera/depth/camera_info', CameraInfo, self.camera_info_callback)
self.object_detection = rospy.Subscriber('/darknet_ros/bounding_boxes', BoundingBoxes, self.yolo)
self.pub = rospy.Publisher('/object_camera_coordinates', Point, queue_size=10)
self.depth_intrinsics = None
self.rgb_image = None
self.depth_image = None
def camera_info_callback(self, msg):
self.depth_intrinsics = msg
print(self.depth_intrinsics.K[0])
print(self.depth_intrinsics.K[4])
print()
def rgb_image_callback(self, msg):
self.rgb_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding="passthrough")
def depth_image_callback(self, msg):
self.depth_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding="passthrough")
self.process_yolo_results()
def process_yolo_results(self):
if self.depth_intrinsics is None or self.rgb_image is None or self.depth_image is None:
return
for box in self.bounding_boxes:
if box.Class == "bottle":
yolo_center_point_x = (box.xmin + box.xmax) / 2
yolo_center_point_y = (box.ymin + box.ymax) / 2
depth = self.depth_image[int(yolo_center_point_y)][int(yolo_center_point_x)]
camera_point = self.convert_pixel_to_camera_coordinates(yolo_center_point_x, yolo_center_point_y, depth)
print("OI:",yolo_center_point_x,yolo_center_point_y)
point_msg = Point(x=camera_point[0], y=camera_point[1], z=camera_point[2])
self.pub.publish(point_msg)
# self.pub.publish(box)
def convert_pixel_to_camera_coordinates(self, u, v, depth):
if self.depth_intrinsics is None:
return None
fx = self.depth_intrinsics.K[0]
fy = self.depth_intrinsics.K[4]
cx = self.depth_intrinsics.K[2]
cy = self.depth_intrinsics.K[5]
camera_x = (u - cx) * depth / fx/1000
camera_y = (v - cy) * depth / fy/1000
camera_z = float(depth)/1000
print("camera_link:",camera_x,camera_y,camera_z)
return [camera_x, camera_y, camera_z]
def yolo(self, msg):
self.bounding_boxes = msg.bounding_boxes
self.process_yolo_results()
def main():
readyolo = Readyolo()
rospy.spin()
if __name__ == '__main__':
main()
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy, sys
import moveit_commander
from geometry_msgs.msg import PoseStamped, Pose
import tf2_geometry_msgs
import tf2_ros
from geometry_msgs.msg import Point
class MoveItIkDemo:
def __init__(self):
# 初始化move_group的API
moveit_commander.roscpp_initialize(sys.argv)
# 初始化ROS节点
rospy.init_node('moveit_it_demo')
# 初始化需要使用move group控制的机械臂中的arm group
self.arm = moveit_commander.MoveGroupCommander('manipulator')
# 获取终端link的名称,这个在setup assistant中设置过了
end_effector_link = self.arm.get_end_effector_link()
# 设置目标位置所使用的参考坐标系
reference_frame = "base"
self.arm.set_pose_reference_frame(reference_frame)
# 当运动规划失败后,允许重新规划
self.arm.allow_replanning(True)
# 设置位置(单位: 米)和姿态(单位:弧度)的允许误差
# self.arm.set_goal_position_tolerance(0.001)
# self.arm.set_goal_orientation_tolerance(0.01)
self.arm.set_goal_position_tolerance(0.001000)
self.arm.set_goal_orientation_tolerance(0.01000)
# 设置允许的最大速度和加速度
self.arm.set_max_acceleration_scaling_factor(0.5)
self.arm.set_max_velocity_scaling_factor(0.5)
# 控制机械臂先回到初始位置
# self.arm.set_named_target('home')
# self.arm.go(wait=True)
# rospy.sleep(1)
# 设置机械臂工作空间中的目标位姿,位置使用x y z坐标描述
# 姿态使用四元数描述,基于base_link坐标系
# target_pose = PoseStamped()
# # 参考坐标系,前面设置了
# target_pose.header.frame_id = reference_frame
# target_pose.header.stamp = rospy.Time.now()
# # 末端位置
# target_pose.pose.position.x = 0.359300
# target_pose.pose.position.y = 0.163600
# target_pose.pose.position.z = 0.278700
# # 末端姿态,四元数
# target_pose.pose.orientation.x = 0.433680
# target_pose.pose.orientation.y = 0.651417
# target_pose.pose.orientation.z = 0.508190
# target_pose.pose.orientation.w = 0.359611
# # 设置机械臂当前的状态作为运动初始状态
# self.arm.set_start_state_to_current_state()
# # 设置机械臂终端运动的目标位姿
# self.arm.set_pose_target(target_pose)
# # 规划运动路径,返回虚影的效果
# plan_success,traj,planning_time,error_code = self.arm.plan()
# # traj = self.arm.plan()
# # 按照规划的运动路径控制机械臂运动
# self.arm.execute(traj)
# # 执行完休息一秒
# rospy.sleep(1)
# 新建一个接收方用来接受话题并处理
self.pose_sub = rospy.Subscriber("/object_camera_coordinates", Point, self.callback)
def transform_pose(self, input_pose, from_frame, to_frame):
try:
tf_buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(tf_buffer)
transform = tf_buffer.lookup_transform(to_frame, from_frame, rospy.Time(0), rospy.Duration(1.0))
transformed_pose = tf2_geometry_msgs.do_transform_pose(input_pose, transform)
return transformed_pose
except(tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationoException) as ex:
rospy.logerr("TF2 error:%s",str(ex))
return None
def callback(self, p):
global object_position, grasp_pose
object_position = p
temp_pose = PoseStamped()
temp_pose.header.frame_id = "camera_link"
temp_pose.pose.position = p
temp_pose.pose.orientation.w = 1.0
transformed_pose = self.transform_pose(temp_pose, "camera_link", "base")
if transformed_pose is not None:
grasp_pose = transformed_pose
self.arm.set_start_state_to_current_state()
self.arm.set_pose_target(grasp_pose)
plan_success,traj,planning_time,error_code = self.arm.plan()
self.arm.execute(traj)
rospy.sleep(1)
def main():
moveitikdemo = MoveItIkDemo()
rospy.spin()
if __name__ == '__main__':
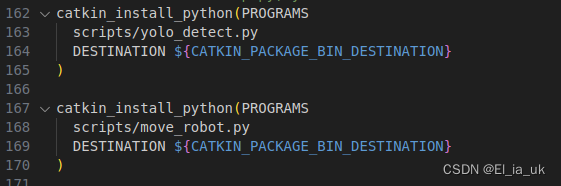
main()修改py文件权限,并在CMakeLists.txt进行相对应的修改