一、数学基础
小波 变换脱胎于傅里叶变换,但是有着傅里叶变换的优点。
1.1 点乘(内积)
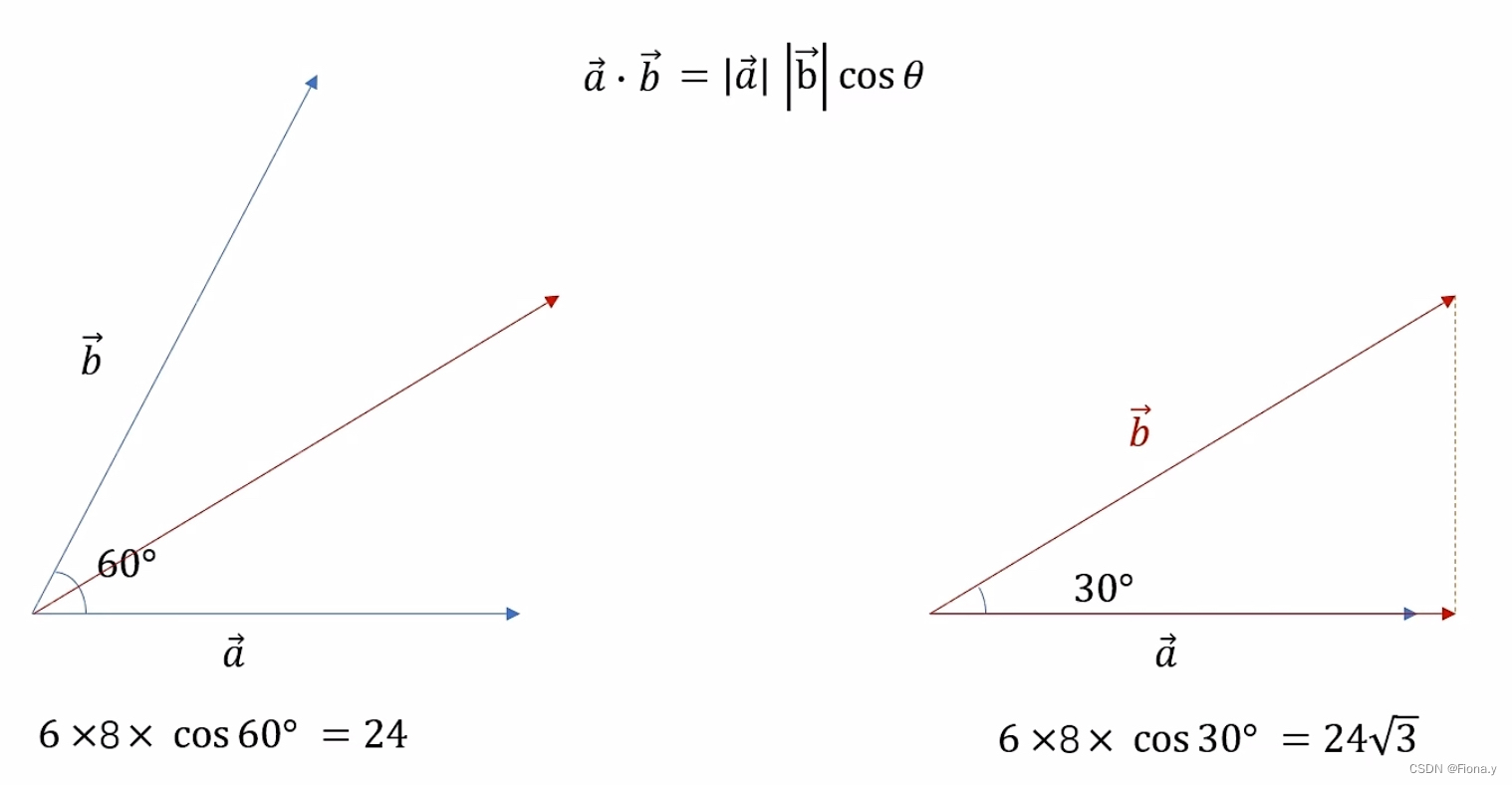
a = 6; b = 8;
点乘的作用:衡量两个事物的相似度(Similarity)
夹角变小,点乘结果变大,结果越大相似度越高
1.2 观察者
将向量a看作是一个观察者,观察向量b与自己有多像;
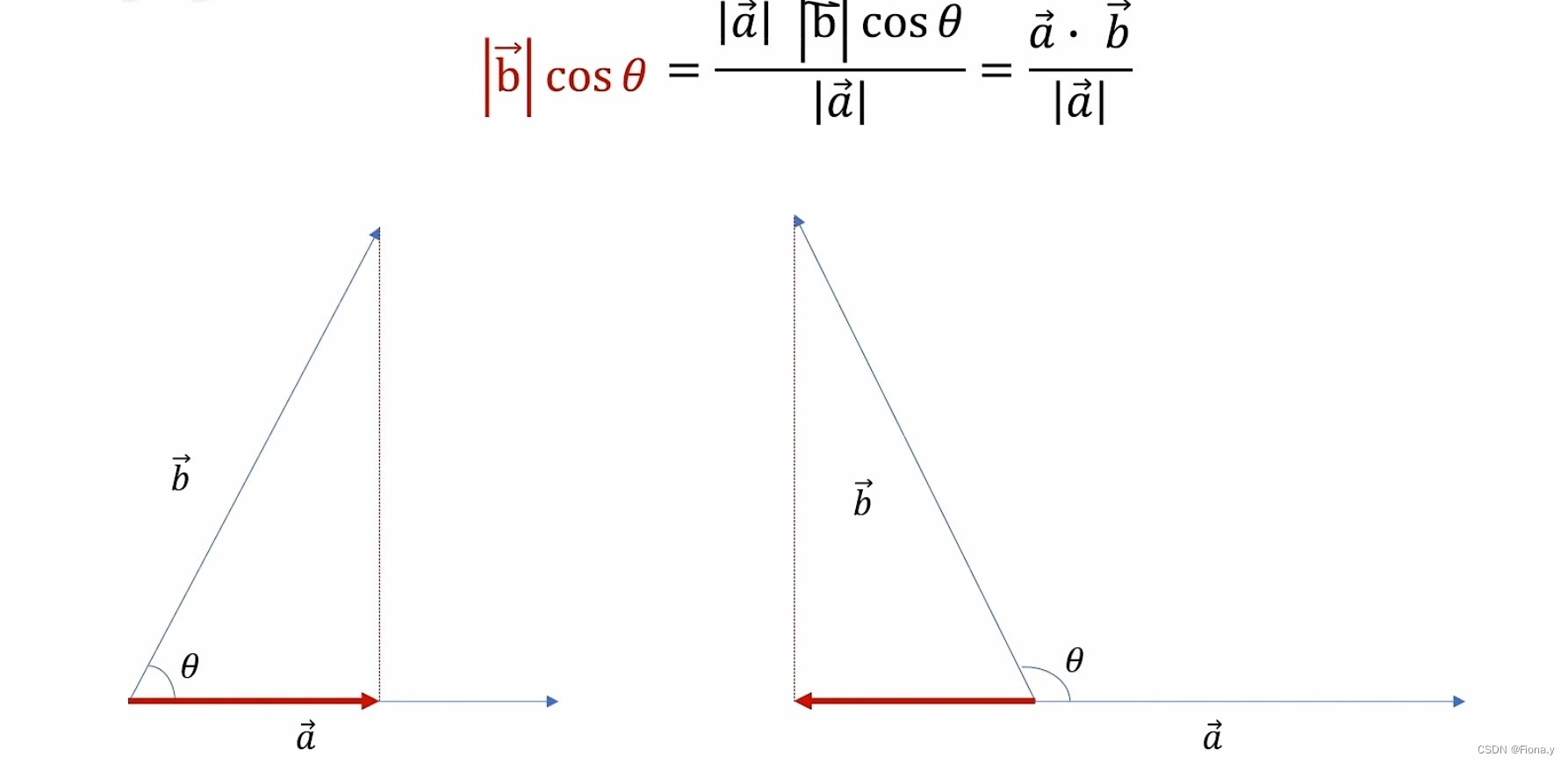
只要向量b在向量a上有投影,说明都具有一定的相似度,但是只要a与b垂直,那么就不相似,即使方向相反,也是相似的。
二、观察者眼中的向量分解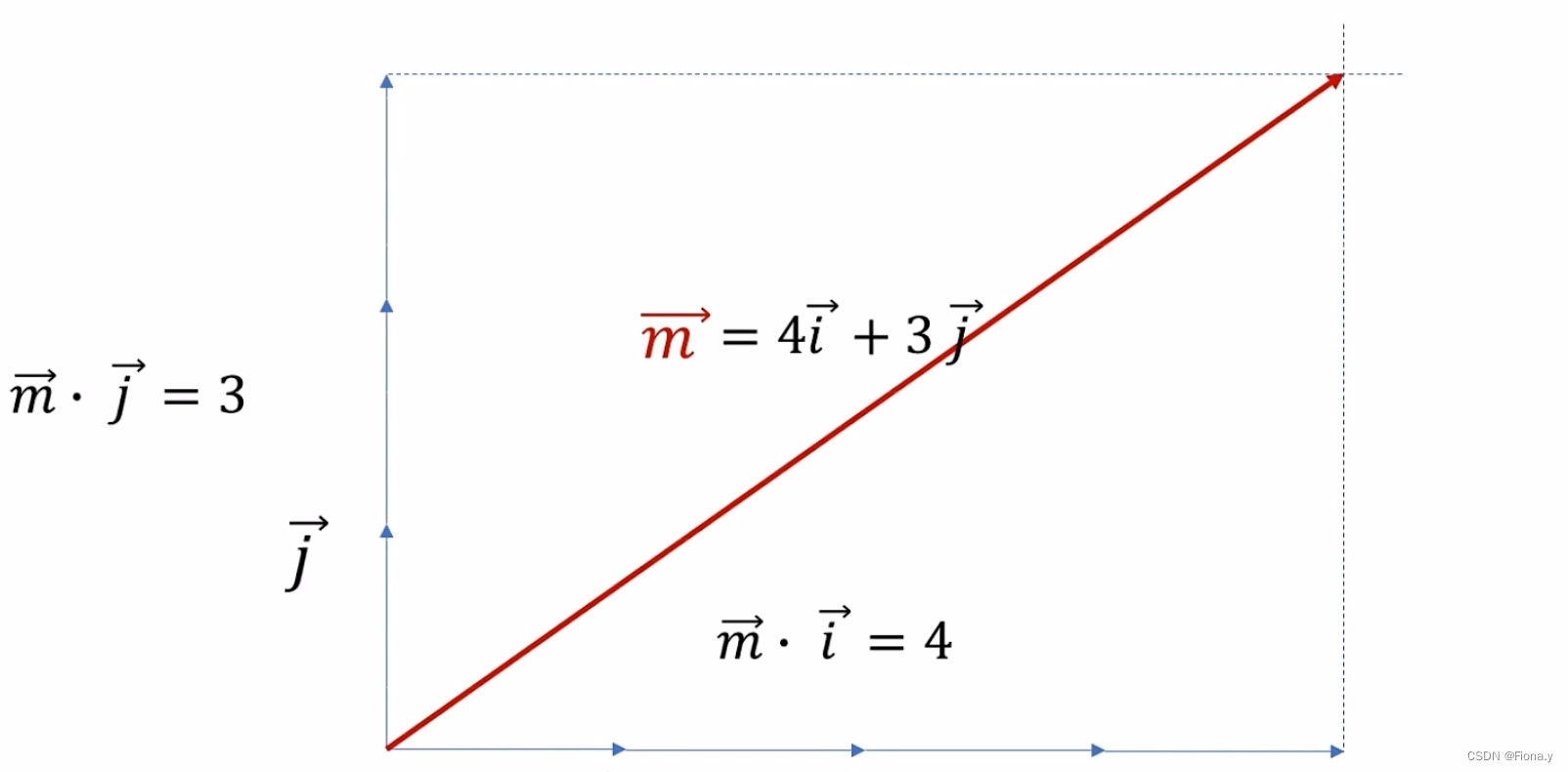
向量i与向量m的相似度更高
向量i与向量j的长度均为1,此为归一化操作。
为什么要归一化:
1、保障基准一致
2、保障各个观察者的能量一致
3、方便后续数据处理
向量如何归一化:向量除以自己的模长即可。即单位向量
4与3均是投影系数,即,不同方向上,不同观察者观察到的目标的量值是多少
每个人看一眼,总结出来得到全貌4i+3j
点乘观察者是了解未知事物的手段
三、在直角坐标系中了解点乘
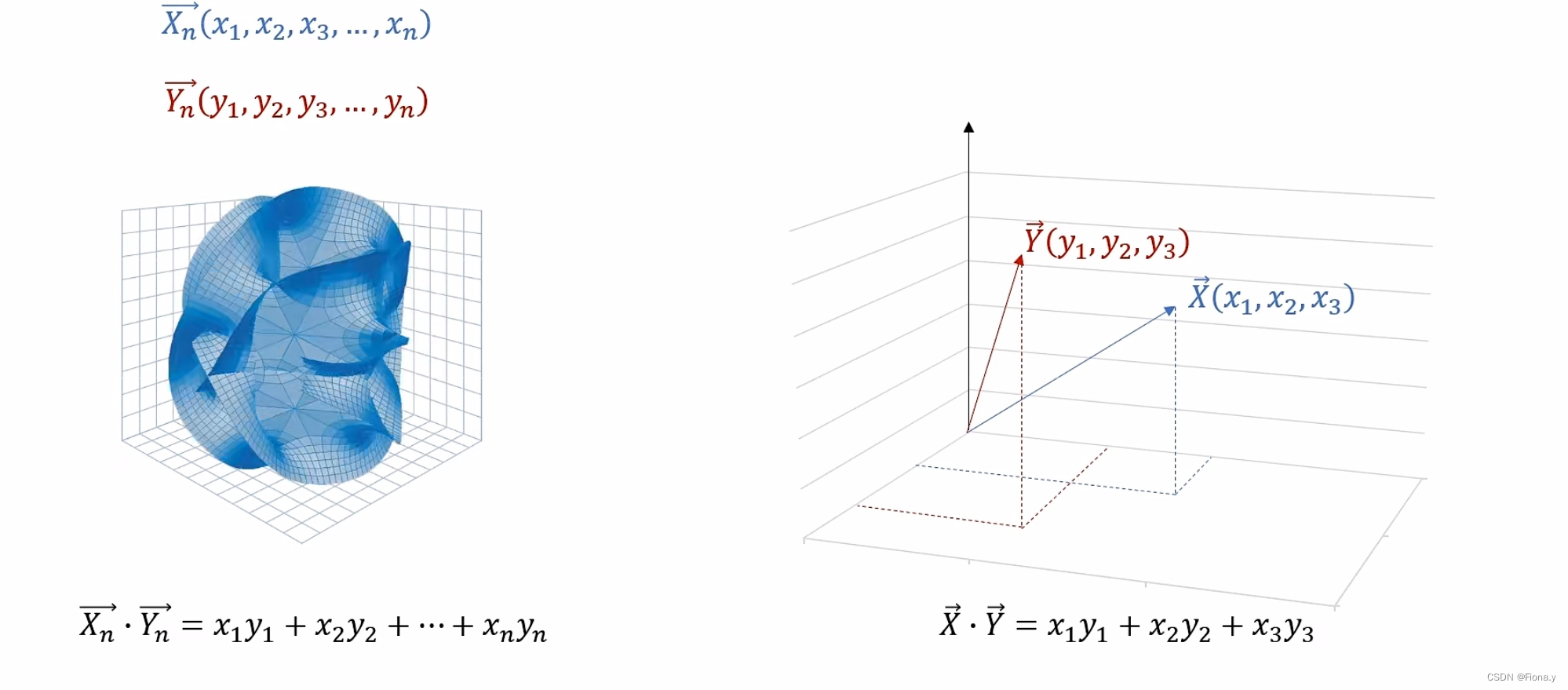
点乘在坐标系中,就是对应坐标相乘相加。
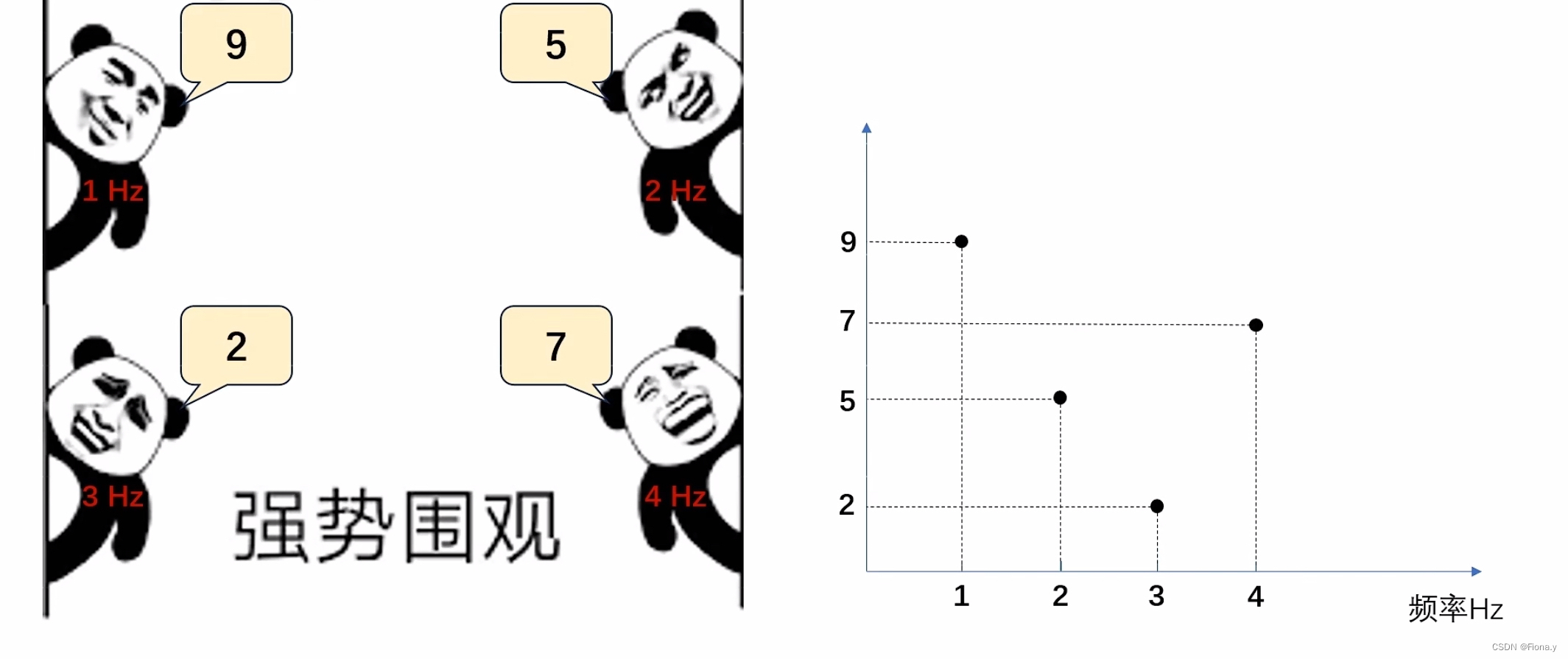
将xn的值与yn的值对应撒到直角坐标系中,会得到离散的值,当n趋于无穷的时候,那么就变成了连续的X(t)与Y(t)

在离散的值中,是对应x与y的值相乘后相加,在连续函数中,则相乘后积分。
当积分结果为0时候,相似度为0;无论结果是正或者是负值,都具有相似度。
四、傅里叶级数
傅里叶级数是由一系列的sin与cos作为基。这些基都是一系列的观察者(通过不同频率来区分)。
观察者与目标函数的相似度,越相似,占比越大。确定他们的相似度,通过点乘再积分。
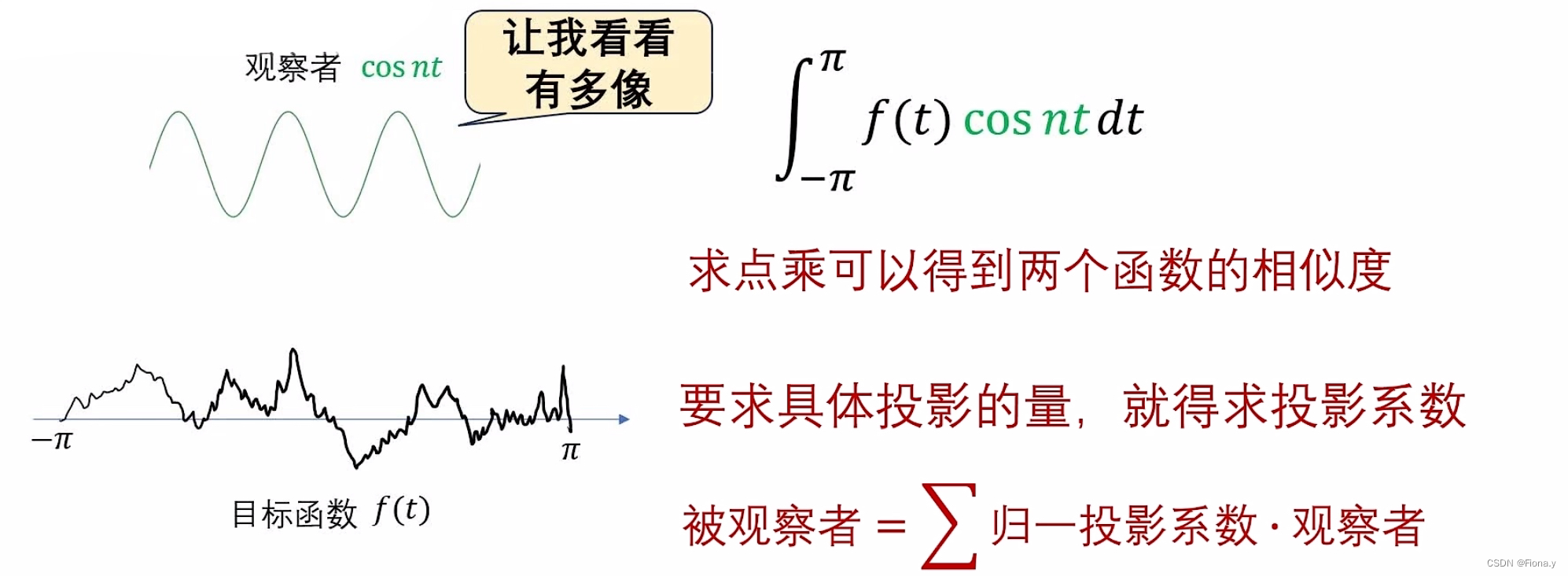
被观察者 = 诡异投影系数 ·观察者
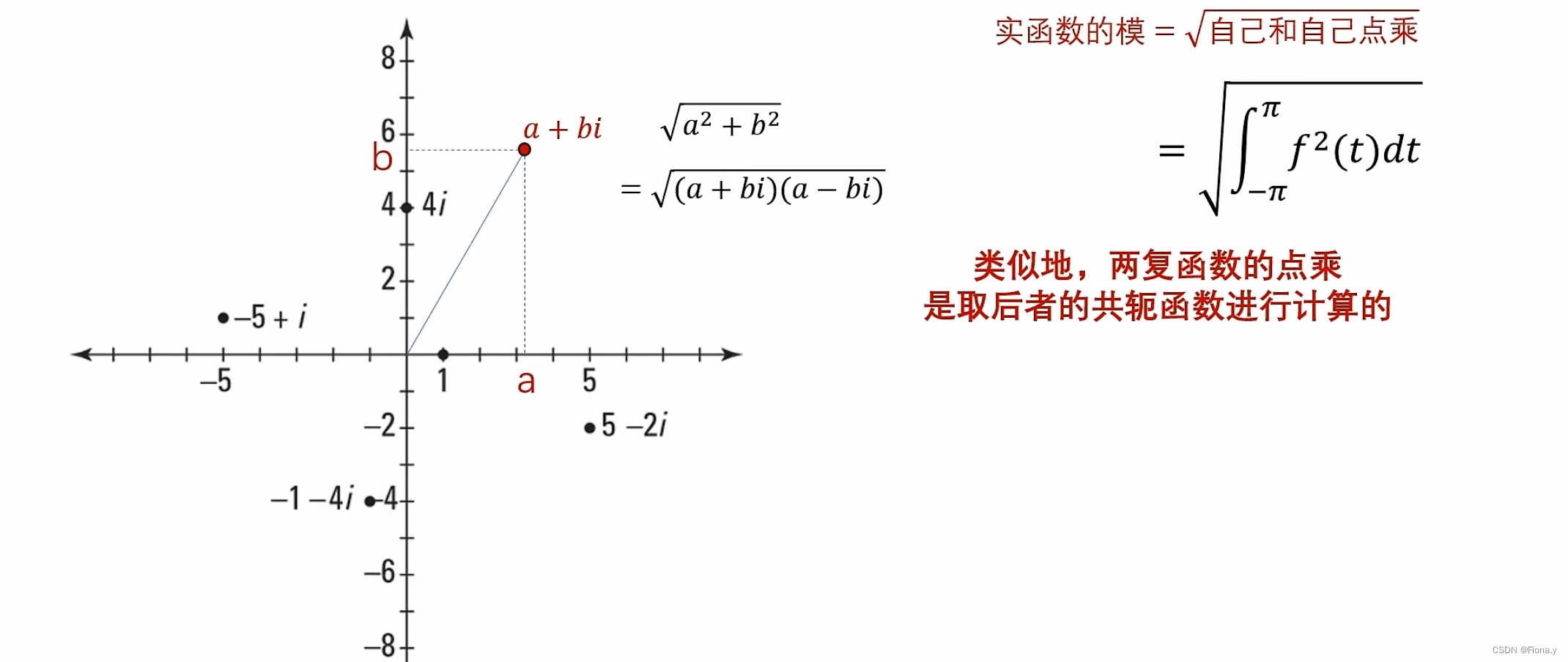
对于向量的归一化,就是求模长 = 自己和自己点乘
连续函数的模长 = f(t)^2 dt
模长对于一个函数称之为二范数(Euclidean morn)
归一投影系数 = 目标·观察者/|观察者模长|^2
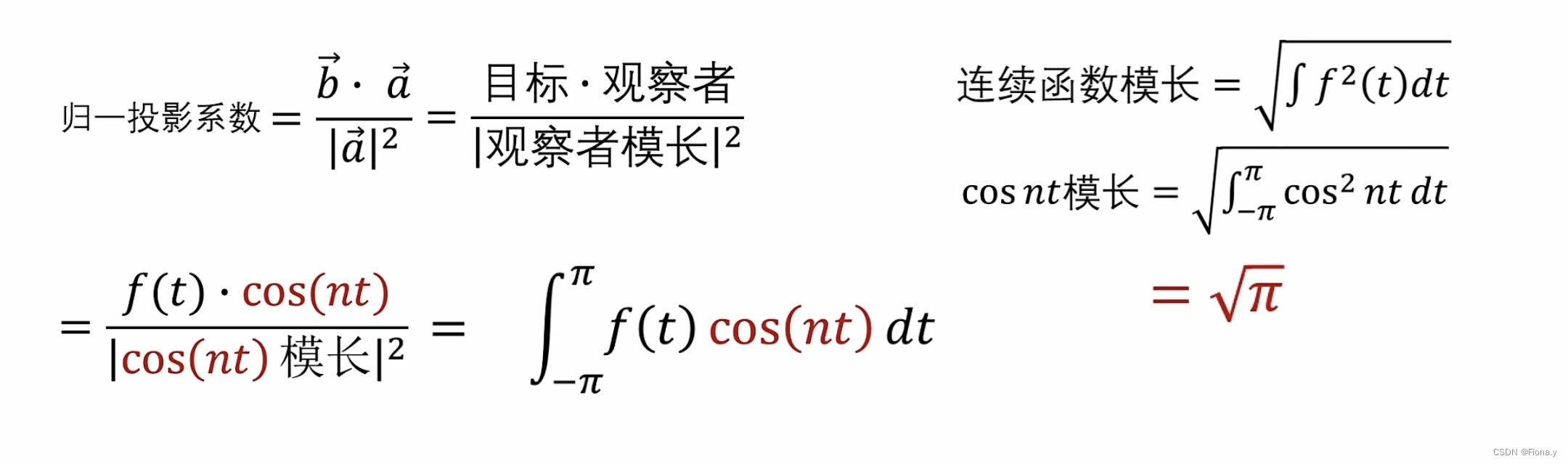
即An的式子
五、负指数形式的傅里叶变换
与上述相似,只是观察者由之前的cos函数变成了e^jwt,观察域从实数域拓展到了带虚数的复数域。w是角频率,越大越快。

查看相似度:
存在的问题:
观察者在整条时间轴一起看,就算只有一部分相似度高,就说具有相似性质。
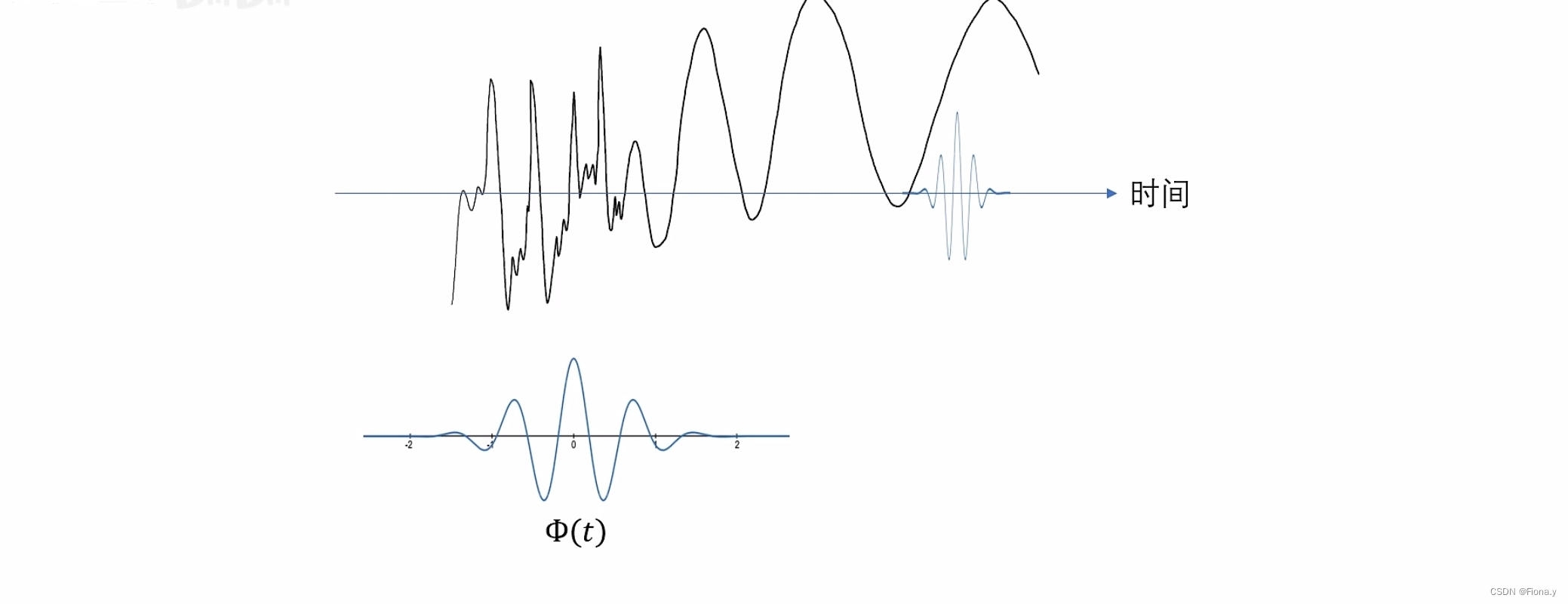
六、观察者的改造
局域化:乘以衰减系数,则观察者在时间轴上不再是无穷无尽的。
观察者巡逻:
如何巡逻?
函数的平移:(t-b),b就是平移因子。不同的b值,对应着不同的时间点。
观察者的高低频如何控制?
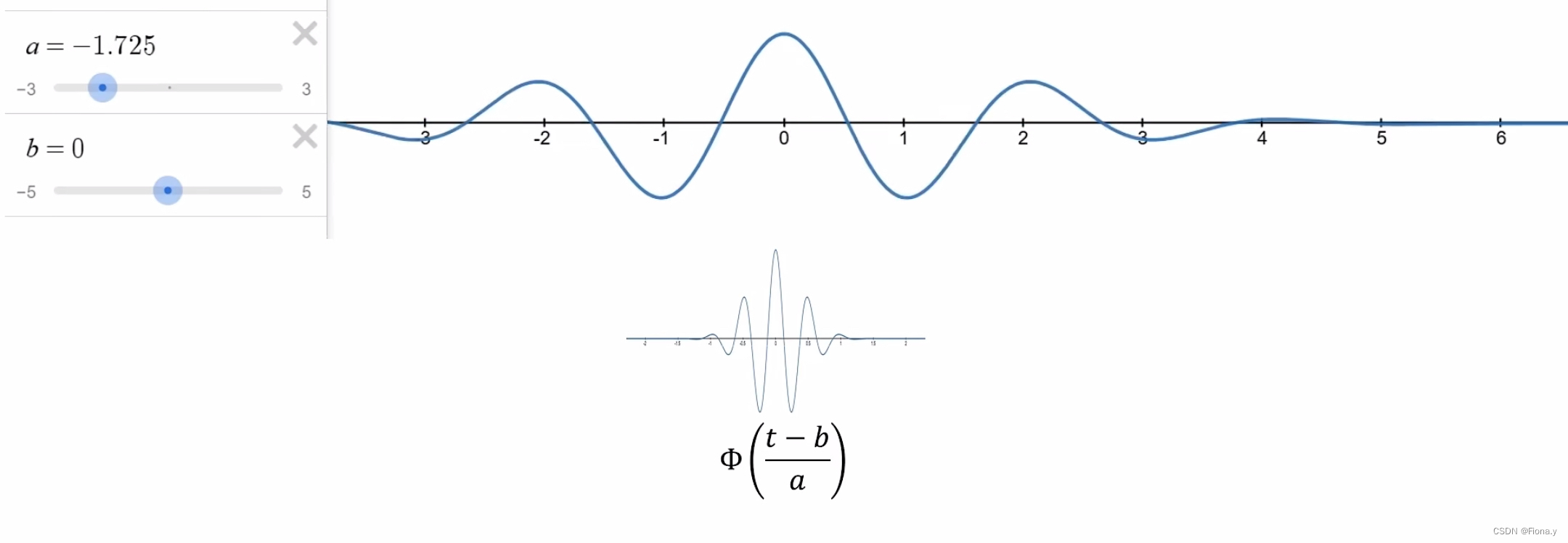
控制a,就能控制观察者的高低频。a也称为尺度因子。
a越小,频率越高。
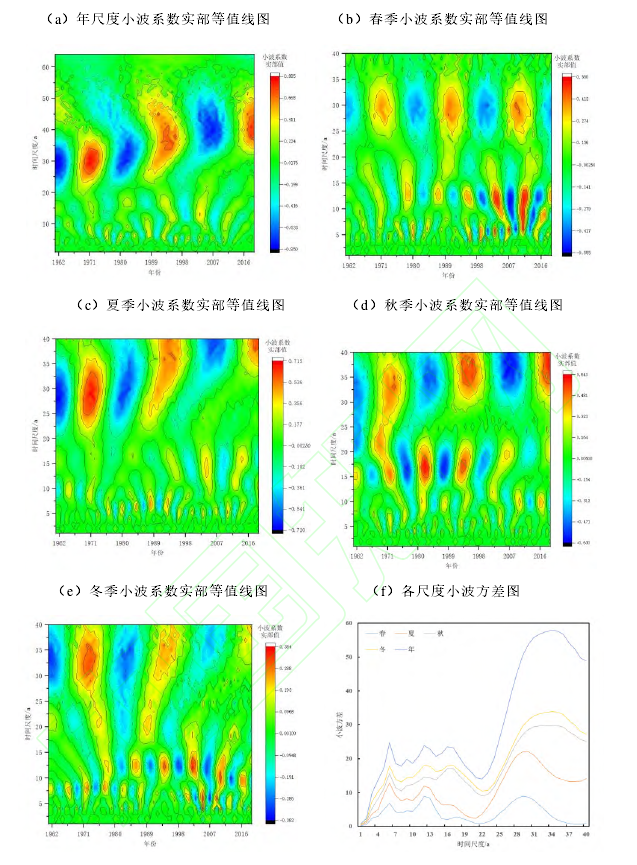
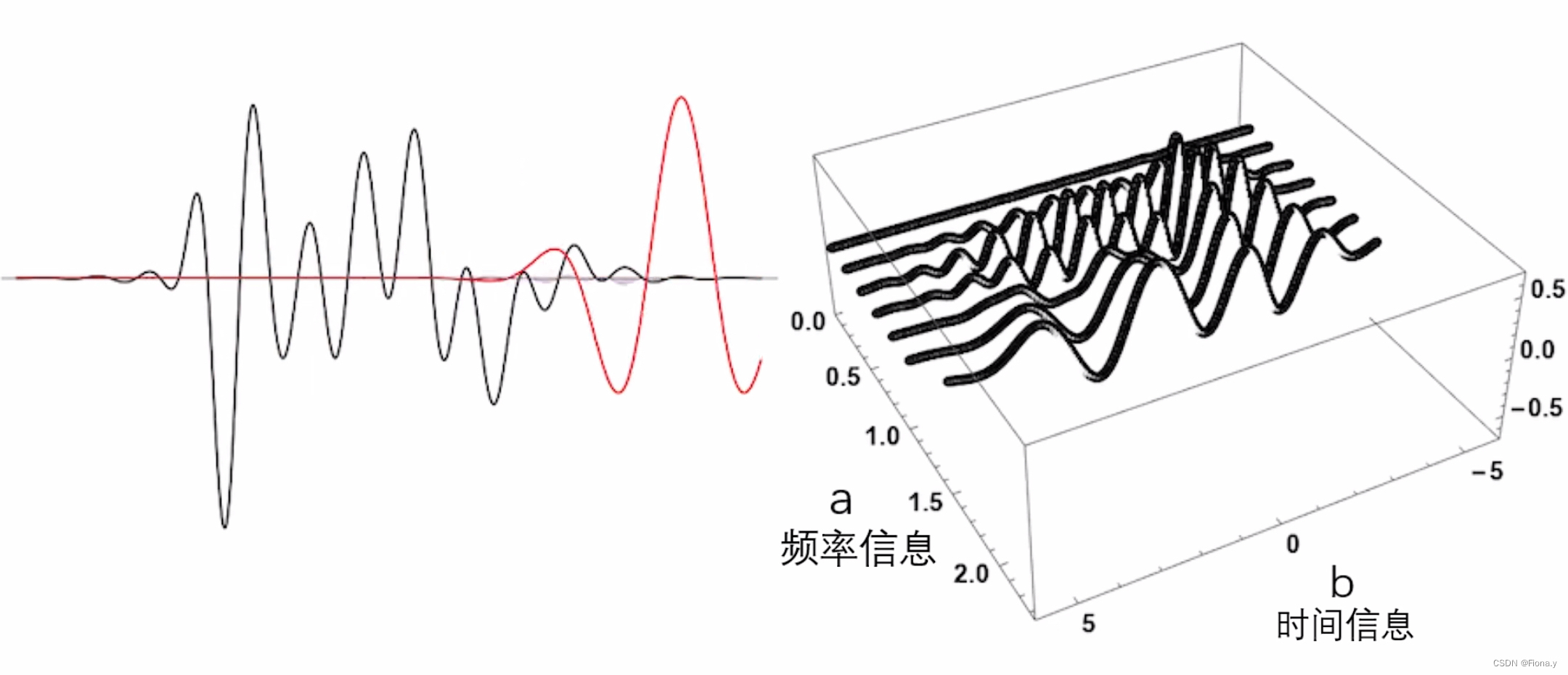
左侧黑色:目标函数,红色观察者,右侧:直线为0,高频观察者与目标函数不像,为一条直线,调整a值,频率慢慢降下来,观察者巡逻查看目标函数是否与自己相像。b表示不同的时间,即巡逻观察。这是一个关于尺度因子a与时间因子b的二元函数图像。是一个三维图像。
七、小波变换结论
小波变换能够同时得到时间和频率的信息,但并没有解决时频不确定的制约。这由数学的本质所确定。
小波,就是一系列在时间轴上做了局域化的观察者就是小波,(t)
不同需要下的小波是不同的,如下一部分: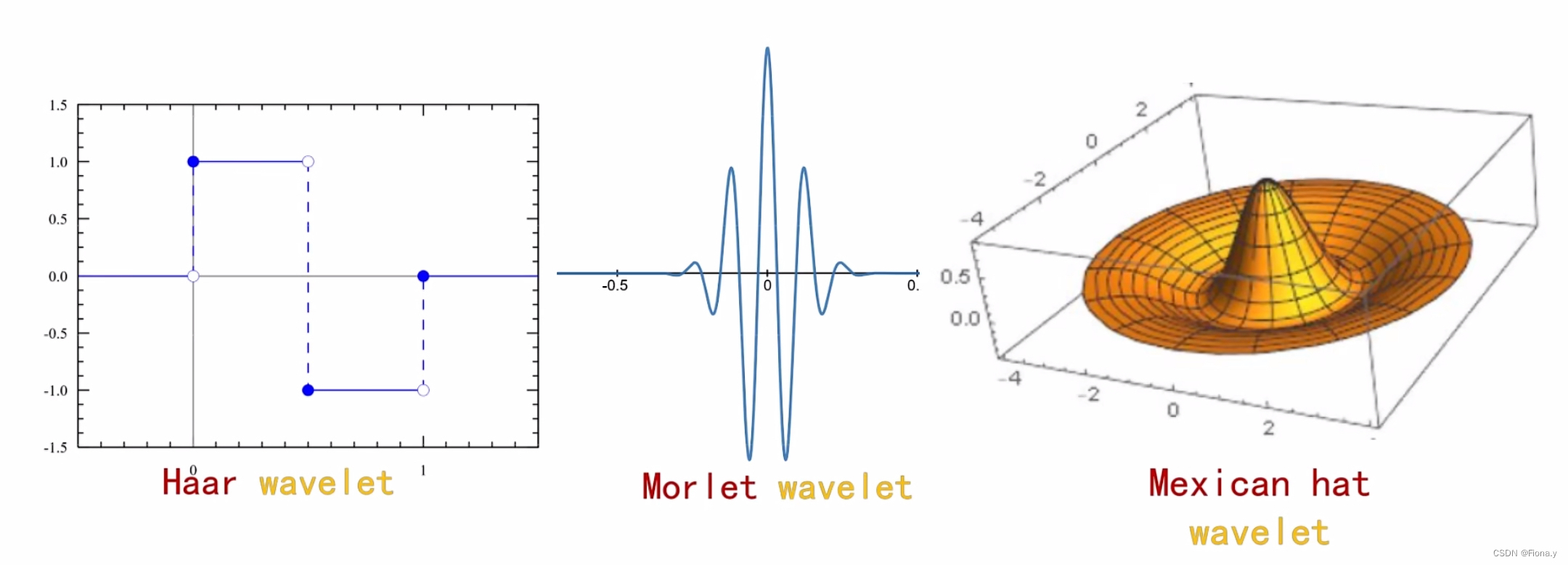
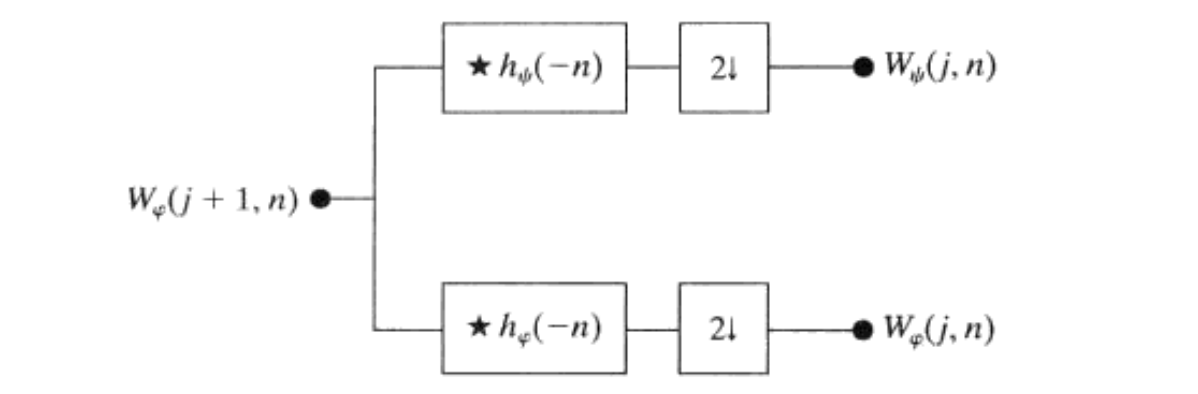
小波变换的公式:
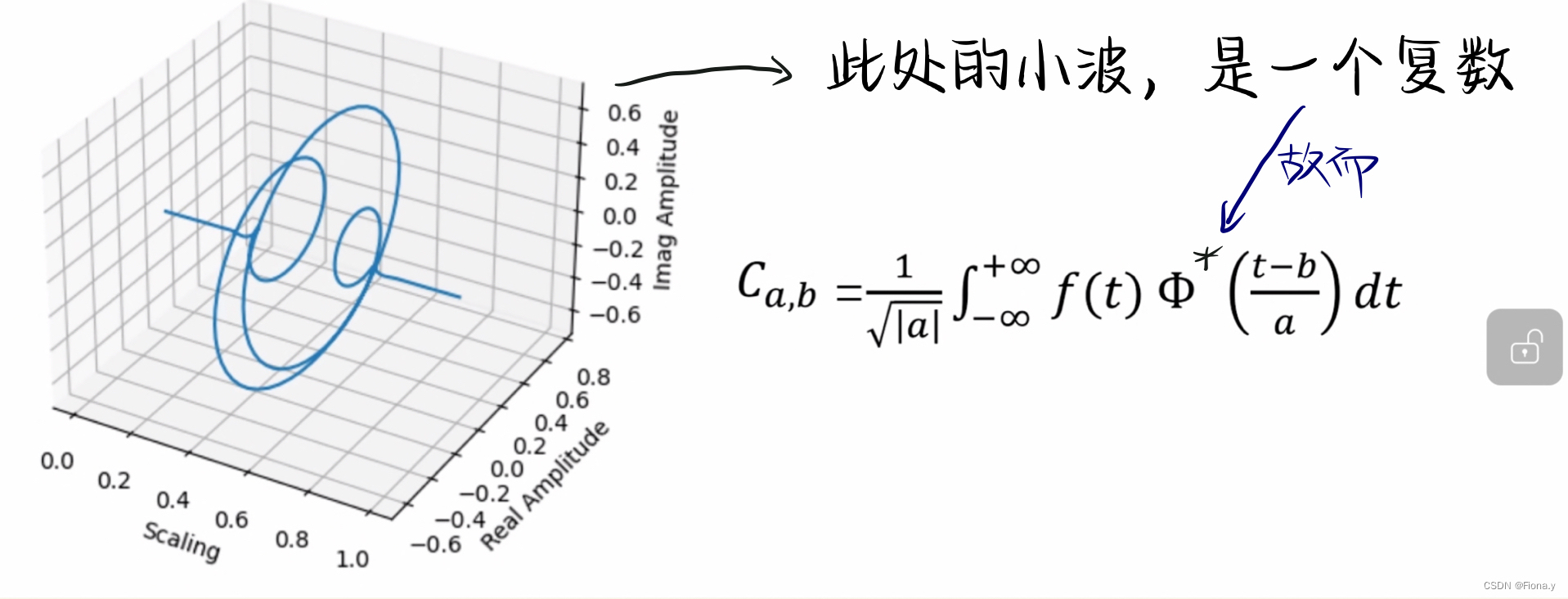
观察者在时间轴上滚动的和目标函数相乘求积分,即卷积。小波函数就是卷积和。