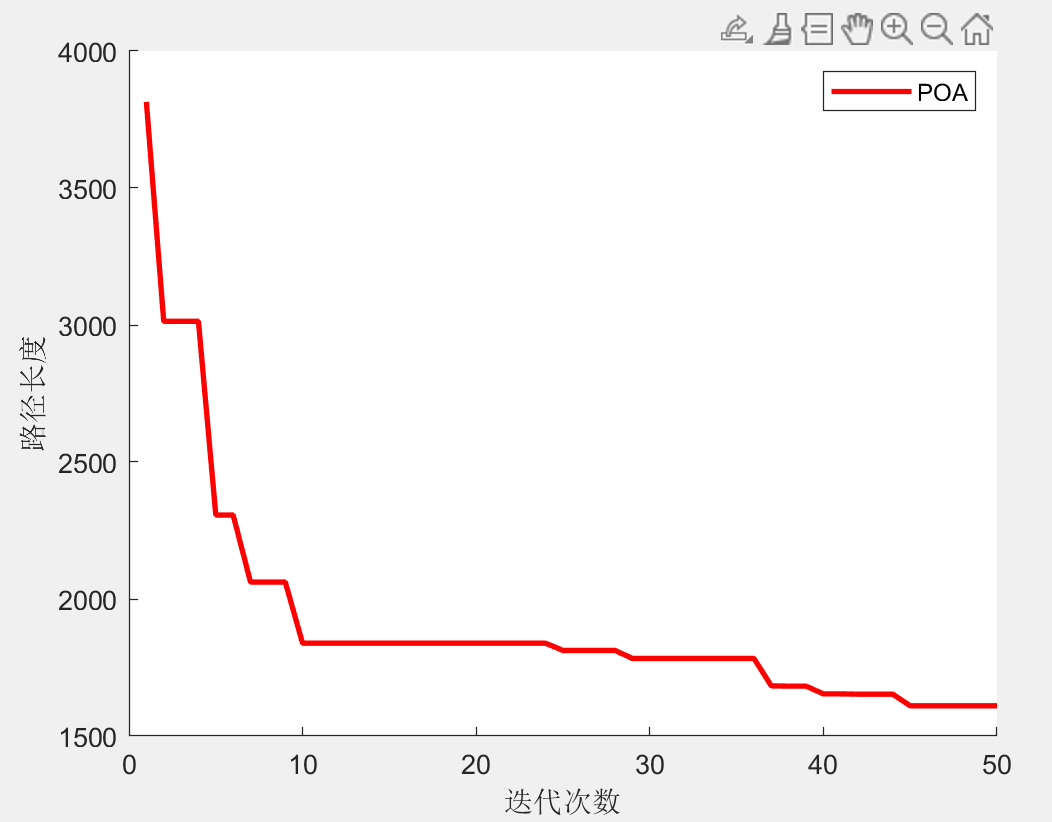
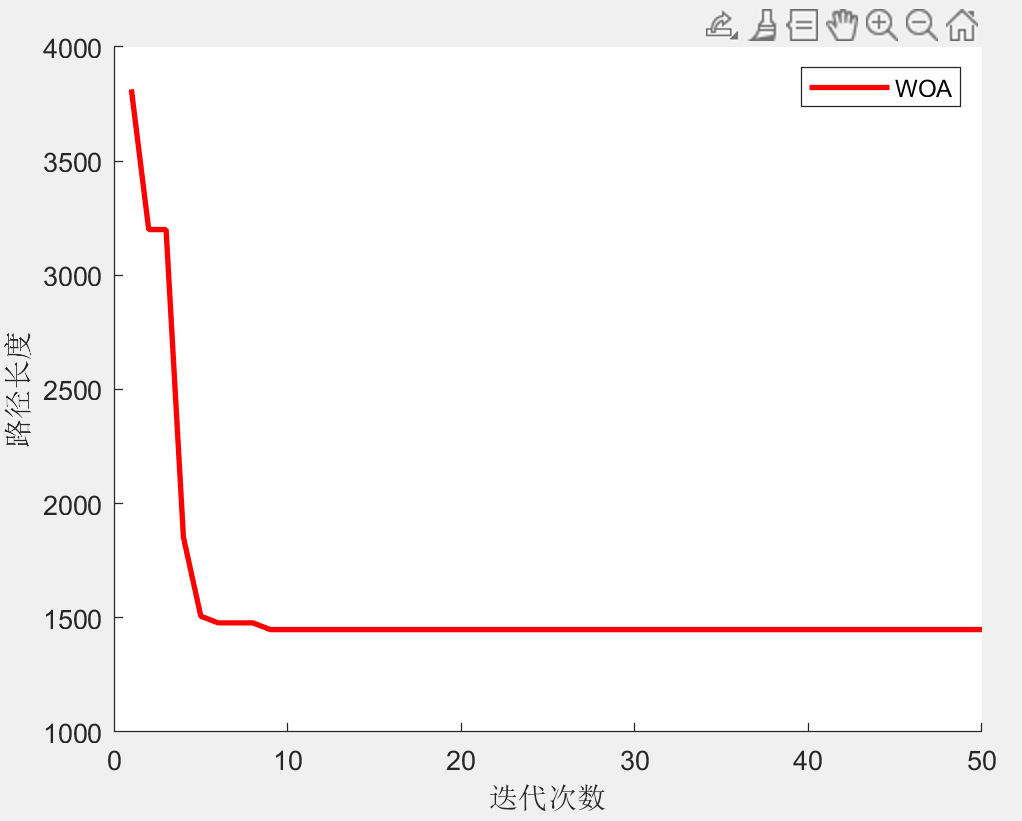
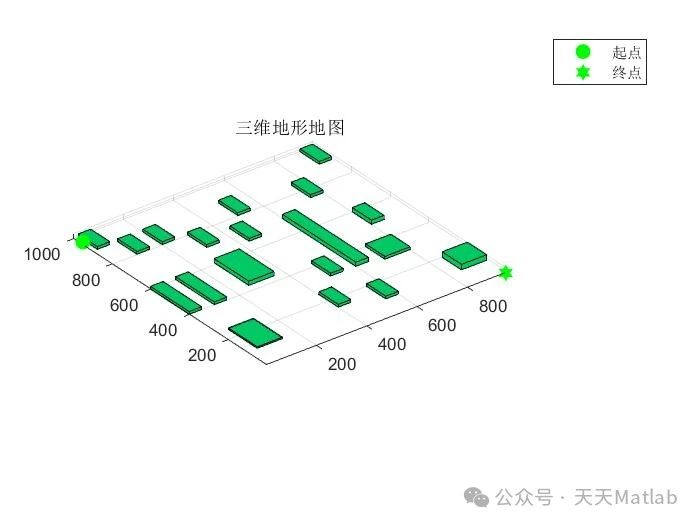
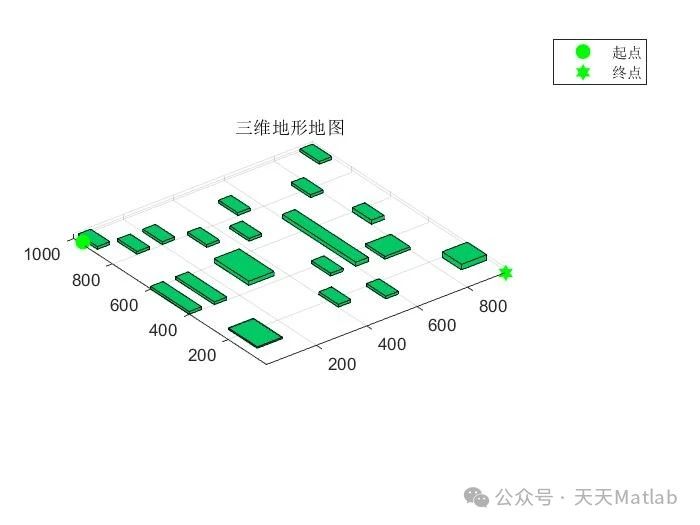
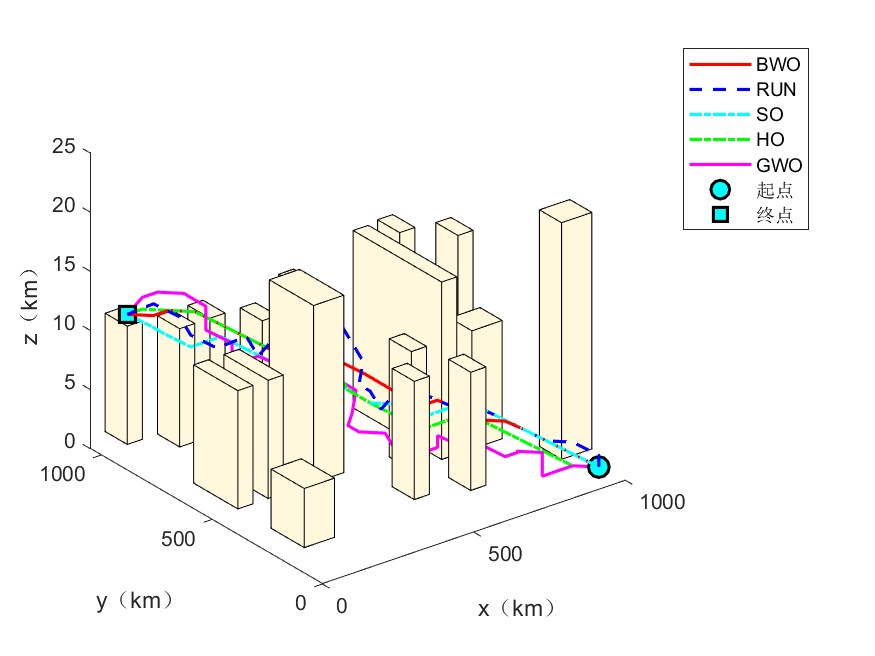
复杂城市地形下无人机避障三维航迹规划是指在城市等高密度区域内,通过无人机的传感器和导航系统来实现飞行路径的规划和调整,从而避免无人机与建筑物、其他无人机、地面障碍物等发生碰撞和冲突。具体来说,无人机需要实时感知周围环境,包括建筑物、电线杆、树木等。传感器可以包括激光雷达、摄像头、超声波传感器等。然后通过对传感器数据进行处理,比如建立地图、分割障碍物、预测运动轨迹等,来确定无人机的可飞行区域。在确定了无人机可飞行区域后,需要对航迹进行规划。一般来说,航迹规划需要满足以下几个要求:一是避免障碍物,二是最小化路径长度,三是保证无人机的安全性和稳定性。现有的算法主要包括基于图搜索的算法、基于采样的算法、基于轨迹优化的算法、鹈鹕优化算法POA等。
一、部分代码
close all
clear
clc
rng('default');
%% 载入数据
data.S=[50,950,12]; %起点位置 横坐标与纵坐标需为50的倍数
data.E=[950,50,1]; %终点点位置 横坐标与纵坐标需为50的倍数
data.Obstacle=xlsread('data1.xls');
data.numObstacles=length(data.Obstacle(:,1));
%% 画图
figure
hold on
plot(curve,'r','LineWidth',2)
xlabel('迭代次数')
ylabel('路径长度')
legend(str);
[~,result]=fobj(Best_pos);
drawPc(result,option,data,str)
result.path(:,1)=result.path(:,1).*data.unit(1);
result.path(:,2)=result.path(:,2).*data.unit(2);
result.path(:,3)=result.path(:,3).*data.unit(3);
%% 显示路径信息
fprintf("路径坐标:\n");
display(result.path)
fprintf("路径长度:%f\n",result.fit);
二、部分结果


路径坐标:
50 950 12
50 900 12
50 850 13
50 800 14
50 750 13
100 700 12
150 650 12
200 650 13
200 650 14
250 650 13
250 600 12
250 550 11
250 500 12
250 450 11
300 400 12
350 400 11
400 350 11
400 350 10
450 350 9
500 400 8
500 400 7
500 350 7
550 300 6
600 300 6
650 300 6
700 250 5
750 200 4
800 150 4
850 150 4
850 100 3
900 50 2
950 50 1
路径长度:1610.286263
三、完整MATLAB代码























![[嵌入式系统-72]:RT-Thread-组件:单元测试框架utest](https://img-blog.csdnimg.cn/direct/6afd2713229342fe8953df301c00a049.png)