知识零碎:
QT的两种编译模式 1.debug 调试模式 2.release 发布模式 OpenCV在此模式下运行
---------------------------------------------------------------------------------------------------------------------------------
仿函数
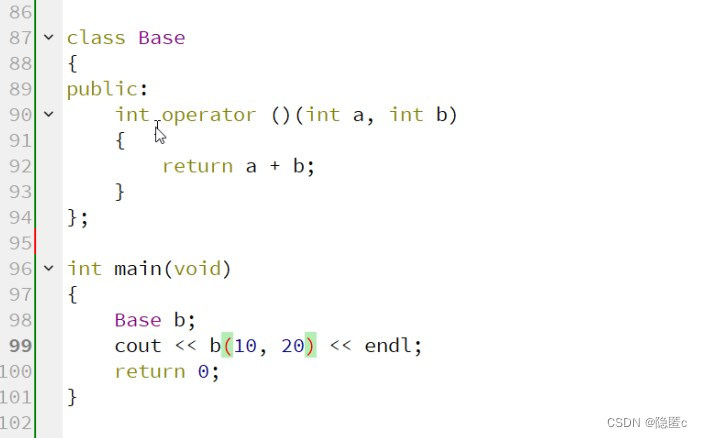
在类中实现一个operator(),并给予合适的参数类型,这个类就有了类似于函数的行为,就是一个仿函数类了。
断言

C++中assert,即断言,可以在程序调试阶段检查错误,常用的就比如函数传参时,若是整型,是否超出范围;若是字符串型,地址是否为空等。
在正常时,程序可以照常执行,如果出现超过范围或空地址时,就可以报错提示。
assert的执行是判断expression是否为假,只有在表达式为假时,才会调用abort报警。
assert注意事项
1)在函数开始处检查传入参数的合法性;
2)每个assert只检验一个条件,同时检验多个条件时,若断言失败,无法直接定位错误;
3)不能使用改变环境的语句,因为assert仅在debug阶段生效,如果这么做,会使程序在真正运行时出错;
4)assert和后面的语句空一行,以形成视觉上的一致感;
5)有的地方,assert不能代替条件过滤;
assert使用原则
1)使用断言捕捉不应该发生的非法情况。不要混淆非法情况与错误情况之间的区别,后者是必然存在的并且是一定要作出处理的。
2)使用assert对函数参数进行确认。
assert禁止使用
assert 只有在 Debug 版本中才有效,如果编译为 Release 版本则被忽略。
如果不想使用assert了,可以在#include语句之前,插入#define NDEBUG,就可以禁用assert了
---------------------------------------------------------------------------------------------------------------------------------
图像是由像素点组成的;
常见图像中的像素点有4种组成方式
(单通道) 位图: 对应位的比特只有存在和不存在,亮和暗 两种状态,用01表示 像素深度为1bit
(单通道)灰度图: 把亮和暗划分为256个梯度,用一个字节(8bit)表示 像素深度为8bit
(黑白图像都属于灰度图)
(三通道)RGB图像: 3个字节,888 像素深度为24bit
(四通道)RGBA图像: A:透明度 显示背景色 0 不透明 255 全透明 像素深度为32bit
像素的深度 : 用于表达一个像素所需的比特数
图像二值化处理: 是将灰度图像上的像素点转化为黑白两种颜色的处理方法。 原理是将灰度图像的像素值按一定的阈值进行分割,大于等于阈值的像素值设为一个值(通常是255),小于阈值的像素值设为另一个值(通常是0)。 这样得到的图像就只有黑白两种颜色,便于进行一些形态学处理和特征提取。
图像二值化有两种方法: 全局阈值和自适应阈值。 1.全局阈值是指将整个图像的像素值都按照同一个阈值进行分割。
2.自适应阈值则是将图像分割成若干个小块,然后对每个小块单独计算阈值,从而得到更准确的分割结果。
图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓
二值化处理
1.先设立阈值,例如127,小于127为黑=0 大于127 为白 =255
-----------------------------------------------------------------------------------------------------------------------------Mat 是最基本的容器类
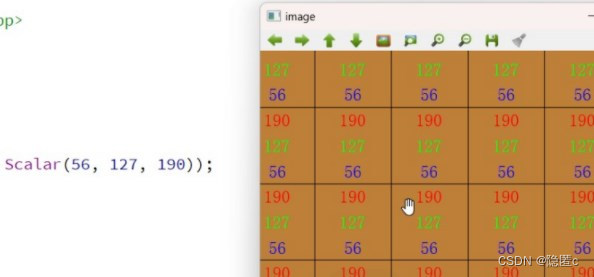
Mat的构造函数 Mat mat(10, 10, CV_8UC3, Scalar(0, 0, 0));
三通道时Mat是按照BGR组合的
Mat 其实是一个模板,可以存放不同图像的组成方式

5,6,CV_8UC3
5行 6列 8:每个像素点占8个比特 U:无符号数据 3:每个像素点占用三个通道
BGR 888
256*256*256
人脸检测时,将 RGB图像转化为灰度图像 变为单通道的256 ,减少运算量和cpu的损耗
图像处理的本质: 矩阵运算,是一个二维数组
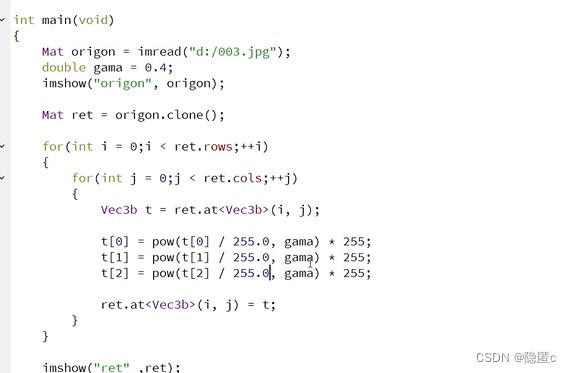
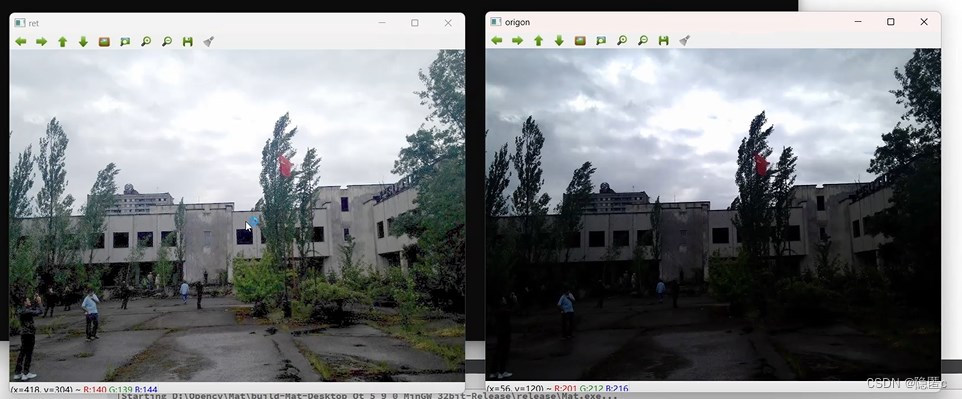
-------------------------------------------------------------------------------------------------------------------------------- 对比度调节
对比度调节方法 1. α β 调节 效果一般
2. Γ 效果好
waitKet(); return 0;
clone 克隆 rows 行 cols 列
---------------------------------------------------------------------------------------------------------------------------------
- 用cvtColor(origion, gray,COLOR_BGR2GRAY );函数转灰度或其他图像
- Mat roi = origion(Rect(10 ,10, 100, 100)); 重载函数调用运算符,获得图像的局部区域
- Resize 缩放图像
- Flip 翻转图像、
滤波
Blur 中值滤波(模糊算法)
某一点的像素= 周边一圈的像素和的平均值
拿2 举例 周围一圈/9 从而达到模糊的效果
锚点:卷积和的中心
高斯滤波Gaussianblur
Erode 腐蚀(消噪点) 通常是针对二值图像的, threshold用于转换二值图像(源图必须是灰度图)
cvtColor(mat, dest, COLOR_BGR2GRAY) threshold(dest, dest, 127, 255, THRESH_BINARY); 腐蚀时: 以卷积核中心点为中心,遍历整个二维数组,卷积核内所有像素都为1时,该点为1,有一个点为0时,该点为0
erode(dest, dest, Mat()); Mat()卷积核 默认3X3
Dilate 膨胀
Rectangle 绘制矩形
Circle 绘制圆形
Ellipse 绘制椭圆
























![[视频教程]赤壁OL单机版_80级英雄_可局域网](https://img-blog.csdnimg.cn/img_convert/a8a233e4b7fec1ef0e040bec34d0544e.jpeg)