一、目前问题:
1、42652IMU读取ID值不正确
目前ID读出:0 正确ID:0X6F
2、磁力计读取ID值不正确
目前ID读出:0 正确ID:0X10
二、原因推测:
1、焊接不良(硬件问题)
2、驱动时序未编写对(软件问题)
三、目前在做的事情:
思路:
先排除软件问题再考虑硬件问题,抓取I2C和SPI通讯的时序,判断是否确实将时序发送了出去,如果时序是正确的,并且我只做读取器件ID的操作,器件只要正常上电,并且我确实向其发送的读取ID时序,不用考虑器件的初始化,我都应该能读到器件的ID,如果仍未读到ID,说明极大可能是硬件问题(焊接问题)
验证:
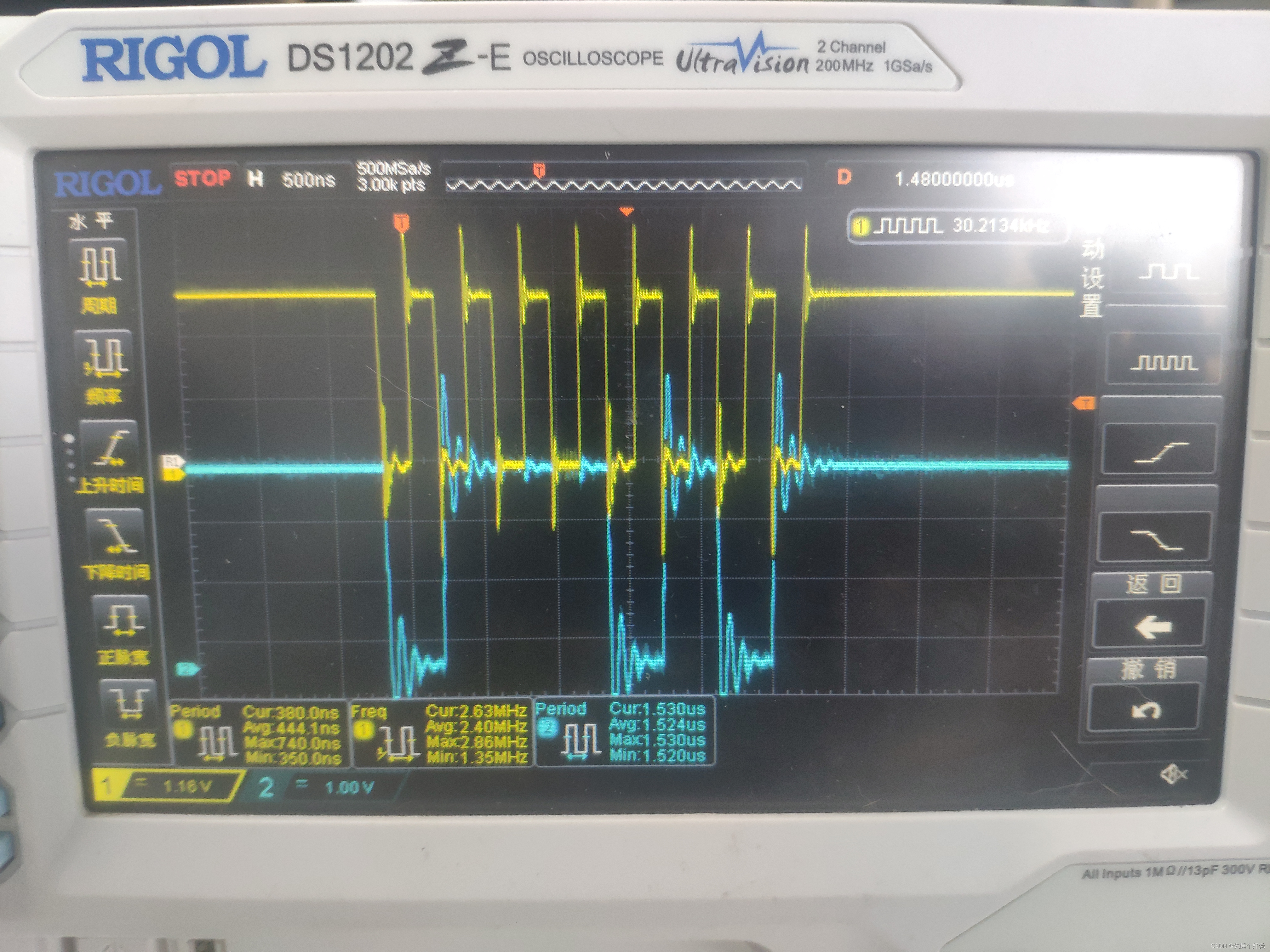
IIM42652(黄色时钟线,蓝色MOSI数据线):根据配置为SPI模式三,所以时钟空闲为高电平,第二个跳变沿采样,所以由主机发送的寻址信号为01110101,十六进制是0X75,根据官方手册,ID寄存器地址确实是0X75
结论:IIM42652的SPI的发送时序没问题
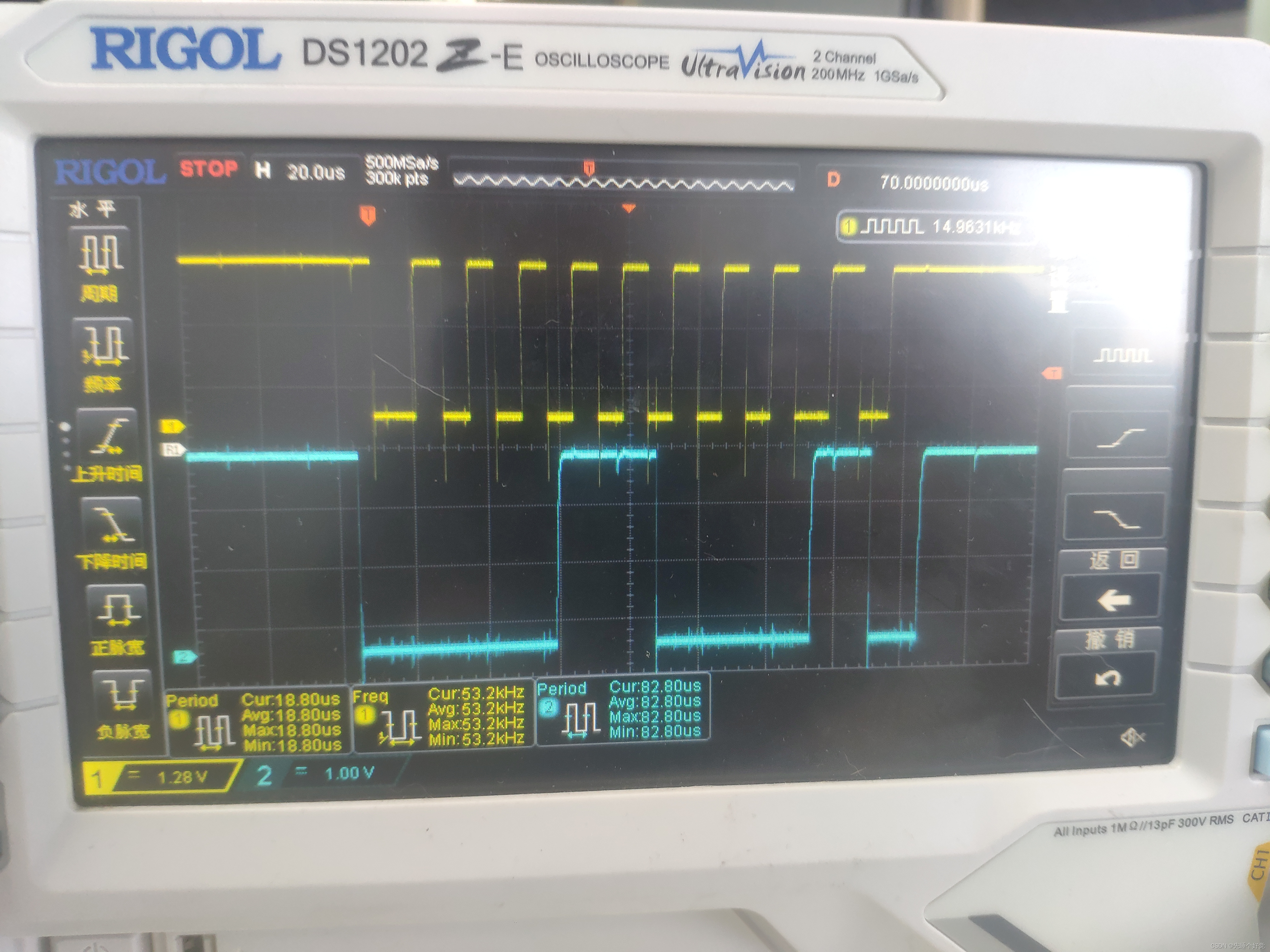
IST8308(黄色SCL,蓝色SDA): 时钟高电平时进行取样,故寻址信号为000110001,前七位为地址,第八位为读写位0为写1为读,第九位为应答位,故为寻址地址为0001100即0X0C,第八位为0写信号,第九位为1无应答。
结论:跟IST8308的I2C通信时序也没问题,从最后一位应答位为1看得出,器件没有应答,故极大可能是焊接问题。
四、需要确定的事
IIM42652:
1、根据IIM42652官方手册,四线SPI的通讯模式是模式三,即CPOL = 1, CPHA = 1 ,时钟空闲时是高电平,第二个跳变沿进行采样,已经确定配置正确
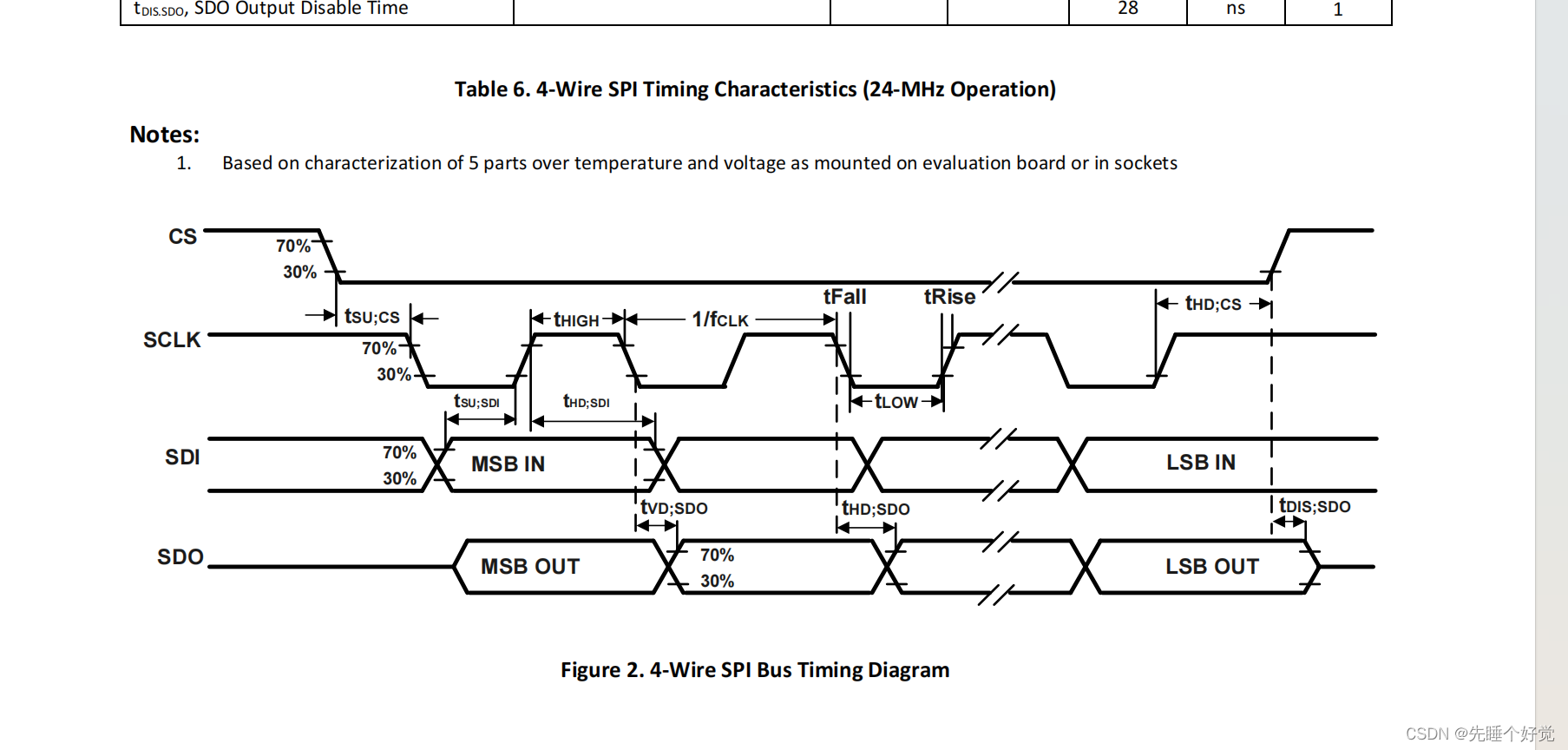
2、根据官方时序图,通信采用的是高位在前模式,即RT_SPI_MSB,已经确定配置正确
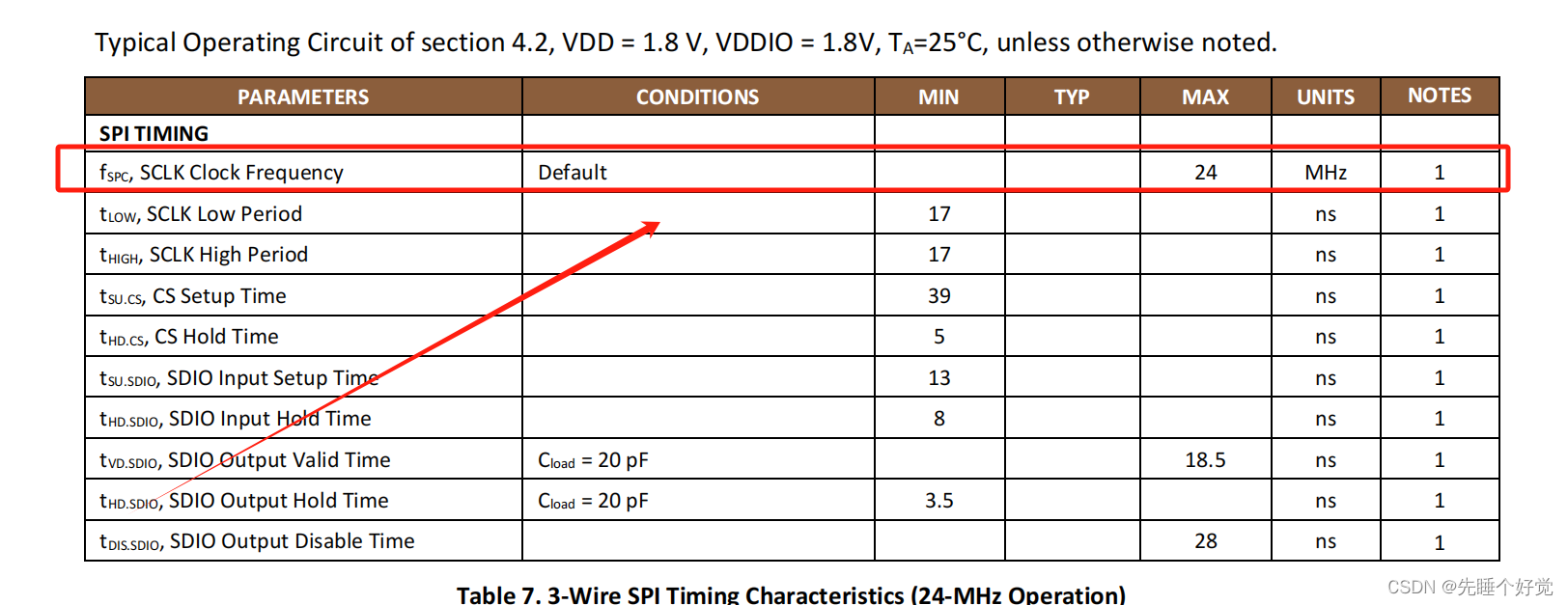
3、根据官方手册,SPI的通讯频率最大24M,我通过示波器实际抓取,我的通讯频率是2.61M,确定了在要求范围内




























![[MRCTF2020]Ez_bypass1 and [网鼎杯 2020 青龙组]AreUSerialz1()php语言基础学习,以及序列化概念的基本了解](https://img-blog.csdnimg.cn/direct/3ee6f226719f439091011e1f7c6de2d1.png)