使用gRPC基于Protobuf传输大文件或数据流
在现代软件开发中,性能通常是关键的考虑因素之一,尤其是在进行大文件传输时。高效的协议和工具可以显著提升传输速度和可靠性。本文详细介绍如何使用gRPC和Protobuf进行大文件传输,并与传统TCP传输进行性能比较。
1. 背景和技术选择
在过去,大文件传输常常使用传统的TCP/IP协议,虽然简单但在处理大规模数据传输时往往速度较慢,尤其在网络条件不佳的环境下更是如此。在最近一个项目中,就有传输大数据文件的需求,用传统方式进行测试发现传输延时无法达到要求,于是在网上查阅资料发现了一个较优的解决方案。
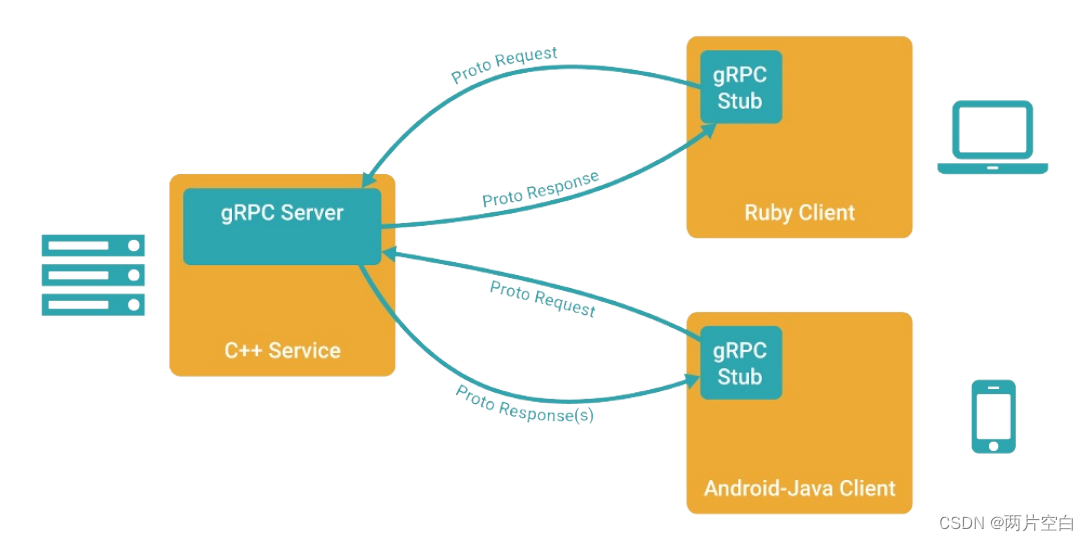
相对于TCP,gRPC提供了一种现代的、高性能的解决方案。gRPC是一个高性能的远程过程调用(RPC)框架,由Google主导开发,使用HTTP/2作为传输层协议,支持多种开发语言,如C++, Java, Python和Go等。Protobuf(Protocol Buffers)则是一种轻量级的数据交换格式,可以高效地序列化结构化数据。
1.1 gRPC的优势
- 高性能: 利用HTTP/2协议,支持多路复用、服务器推送等现代网络技术。
- 跨语言支持: 支持多种编程语言,便于在不同的系统间交互。
- 接口定义: 使用.proto文件定义服务,自动生成服务端和客户端代码,减少重复工作量。
- 流控制: 支持流式传输数据,适合大文件传输和实时数据处理。
1.2 Protocol Buffers的优势
- 高效: 编码和解码迅速,且生成的数据包比XML小3到10倍。
- 灵活: 支持向后兼容性,新旧数据格式可以无缝转换。
- 简洁: 简化了复杂数据结构的处理,易于开发者使用。
2. 项目配置与环境搭建
为了使用gRPC进行项目开发,首先需要在开发环境中安装gRPC及其依赖的库。以下是gRPC安装的步骤,适用于多种操作系统,包括Windows、Linux和macOS。
2.1 安装gRPC和Protocol Buffers
gRPC的安装可以通过多种方式进行,包括使用包管理器或从源代码编译。以下介绍Ubuntu下安装C++版本的gRPC(捆绑了Protocol Buffers)
注:如果gRPC和Protocol Buffers的版本不匹配会有问题,无法正常使用
2.1.1 安装Cmake
sudo apt install -y cmake
2.1.2 设置环境变量
export MY_INSTALL_DIR=$HOME/.local
mkdir -p $MY_INSTALL_DIR
export PATH="$MY_INSTALL_DIR/bin:$PATH" # 为了永久生效可以将该命令写入~/.bashrc文件中
2.1.3 安装必要的依赖
sudo apt install -y build-essential autoconf libtool pkg-config
2.1.4 下载gRPC源码
git clone --recurse-submodules -b v1.62.0 --depth 1 --shallow-submodules https://github.com/grpc/grpc
2.1.5 编译gRPC和 Protocol Buffers
cd grpc
mkdir -p cmake/build
pushd cmake/build
cmake -DgRPC_INSTALL=ON \
-DgRPC_BUILD_TESTS=OFF \
-DCMAKE_INSTALL_PREFIX=$MY_INSTALL_DIR \
../..
make -j 4
make install
popd
2.2 CMake配置详解
2.1.1 通用配置
common.cmake 是一个辅助性的 CMake 模块文件,通常用于存放项目中共用的 CMake 配置,以简化和集中管理 CMakeLists.txt 文件中的代码。这种做法有助于提升项目的可维护性和可读性。
在 gRPC 项目中,示例代码中的common.cmake 包括以下内容:
- 变量设置:定义项目中使用的常见路径和变量,例如 gRPC 和 protobuf 的安装路径,以便在整个项目中重用。
- 库查找:使用
find_package()或find_library()命令来查找和配置项目所需的依赖库,如 gRPC、protobuf、SSL 等。 - 编译器选项:统一设置编译器标志,例如 C++ 版本标准、优化级别、警告处理等。
- 宏定义:创建复用的 CMake 宏或函数,例如用于处理 proto 文件生成相关命令的宏,这有助于避免在
CMakeLists.txt文件中重复相同的代码块。
# Copyright 2018 gRPC authors.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
#
# cmake build file for C++ route_guide example.
# Assumes protobuf and gRPC have been installed using cmake.
# See cmake_externalproject/CMakeLists.txt for all-in-one cmake build
# that automatically builds all the dependencies before building route_guide.
cmake_minimum_required(VERSION 3.8)
if(MSVC)
add_definitions(-D_WIN32_WINNT=0x600)
endif()
find_package(Threads REQUIRED)
if(GRPC_AS_SUBMODULE)
# One way to build a projects that uses gRPC is to just include the
# entire gRPC project tree via "add_subdirectory".
# This approach is very simple to use, but the are some potential
# disadvantages:
# * it includes gRPC's CMakeLists.txt directly into your build script
# without and that can make gRPC's internal setting interfere with your
# own build.
# * depending on what's installed on your system, the contents of submodules
# in gRPC's third_party/* might need to be available (and there might be
# additional prerequisites required to build them). Consider using
# the gRPC_*_PROVIDER options to fine-tune the expected behavior.
#
# A more robust approach to add dependency on gRPC is using
# cmake's ExternalProject_Add (see cmake_externalproject/CMakeLists.txt).
# Include the gRPC's cmake build (normally grpc source code would live
# in a git submodule called "third_party/grpc", but this example lives in
# the same repository as gRPC sources, so we just look a few directories up)
add_subdirectory(../../.. ${CMAKE_CURRENT_BINARY_DIR}/grpc EXCLUDE_FROM_ALL)
message(STATUS "Using gRPC via add_subdirectory.")
# After using add_subdirectory, we can now use the grpc targets directly from
# this build.
set(_PROTOBUF_LIBPROTOBUF libprotobuf)
set(_REFLECTION grpc++_reflection)
set(_ORCA_SERVICE grpcpp_orca_service)
if(CMAKE_CROSSCOMPILING)
find_program(_PROTOBUF_PROTOC protoc)
else()
set(_PROTOBUF_PROTOC $<TARGET_FILE:protobuf::protoc>)
endif()
set(_GRPC_GRPCPP grpc++)
if(CMAKE_CROSSCOMPILING)
find_program(_GRPC_CPP_PLUGIN_EXECUTABLE grpc_cpp_plugin)
else()
set(_GRPC_CPP_PLUGIN_EXECUTABLE $<TARGET_FILE:grpc_cpp_plugin>)
endif()
elseif(GRPC_FETCHCONTENT)
# Another way is to use CMake's FetchContent module to clone gRPC at
# configure time. This makes gRPC's source code available to your project,
# similar to a git submodule.
message(STATUS "Using gRPC via add_subdirectory (FetchContent).")
include(FetchContent)
FetchContent_Declare(
grpc
GIT_REPOSITORY https://github.com/grpc/grpc.git
# when using gRPC, you will actually set this to an existing tag, such as
# v1.25.0, v1.26.0 etc..
# For the purpose of testing, we override the tag used to the commit
# that's currently under test.
GIT_TAG vGRPC_TAG_VERSION_OF_YOUR_CHOICE)
FetchContent_MakeAvailable(grpc)
# Since FetchContent uses add_subdirectory under the hood, we can use
# the grpc targets directly from this build.
set(_PROTOBUF_LIBPROTOBUF libprotobuf)
set(_REFLECTION grpc++_reflection)
set(_PROTOBUF_PROTOC $<TARGET_FILE:protoc>)
set(_GRPC_GRPCPP grpc++)
if(CMAKE_CROSSCOMPILING)
find_program(_GRPC_CPP_PLUGIN_EXECUTABLE grpc_cpp_plugin)
else()
set(_GRPC_CPP_PLUGIN_EXECUTABLE $<TARGET_FILE:grpc_cpp_plugin>)
endif()
else()
# This branch assumes that gRPC and all its dependencies are already installed
# on this system, so they can be located by find_package().
# Find Protobuf installation
# Looks for protobuf-config.cmake file installed by Protobuf's cmake installation.
option(protobuf_MODULE_COMPATIBLE TRUE)
find_package(Protobuf CONFIG REQUIRED)
message(STATUS "Using protobuf ${Protobuf_VERSION}")
set(_PROTOBUF_LIBPROTOBUF protobuf::libprotobuf)
set(_REFLECTION gRPC::grpc++_reflection)
if(CMAKE_CROSSCOMPILING)
find_program(_PROTOBUF_PROTOC protoc)
else()
set(_PROTOBUF_PROTOC $<TARGET_FILE:protobuf::protoc>)
endif()
# Find gRPC installation
# Looks for gRPCConfig.cmake file installed by gRPC's cmake installation.
find_package(gRPC CONFIG REQUIRED)
message(STATUS "Using gRPC ${gRPC_VERSION}")
set(_GRPC_GRPCPP gRPC::grpc++)
if(CMAKE_CROSSCOMPILING)
find_program(_GRPC_CPP_PLUGIN_EXECUTABLE grpc_cpp_plugin)
else()
set(_GRPC_CPP_PLUGIN_EXECUTABLE $<TARGET_FILE:gRPC::grpc_cpp_plugin>)
endif()
endif()
2.2.2 项目配置
这个配置文件包括了从proto文件生成C++代码的命令,以及编译这些生成的源代码文件为库和可执行文件的命令。利用CMake,我们能够确保项目在不同环境中具有可重复构建的能力。
cmake_minimum_required(VERSION 3.15)
project(grpcDemo)
set(CMAKE_CXX_STANDARD 17)
include(common.cmake)
# Proto file
get_filename_component(transfer_proto "transferfile.proto" ABSOLUTE)
get_filename_component(transfer_proto_path "${transfer_proto}" PATH)
# Generated sources
set(transfer_proto_srcs "${CMAKE_CURRENT_BINARY_DIR}/transferfile.pb.cc")
set(transfer_proto_hdrs "${CMAKE_CURRENT_BINARY_DIR}/transferfile.pb.h")
set(transfer_grpc_srcs "${CMAKE_CURRENT_BINARY_DIR}/transferfile.grpc.pb.cc")
set(transfer_grpc_hdrs "${CMAKE_CURRENT_BINARY_DIR}/transferfile.grpc.pb.h")
add_custom_command(
OUTPUT "${transfer_proto_srcs}" "${transfer_proto_hdrs}" "${transfer_grpc_srcs}" "${transfer_grpc_hdrs}"
COMMAND ${_PROTOBUF_PROTOC}
ARGS --grpc_out "${CMAKE_CURRENT_BINARY_DIR}"
--cpp_out "${CMAKE_CURRENT_BINARY_DIR}"
-I "${transfer_proto_path}"
--plugin=protoc-gen-grpc="${_GRPC_CPP_PLUGIN_EXECUTABLE}"
"${transfer_proto}"
DEPENDS "${transfer_proto}")
# Include generated *.pb.h files
include_directories("${CMAKE_CURRENT_BINARY_DIR}")
# transfer_grpc_proto
add_library(transfer_grpc_proto
${transfer_grpc_srcs}
${transfer_grpc_hdrs}
${transfer_proto_srcs}
${transfer_proto_hdrs})
target_link_libraries(transfer_grpc_proto
${_REFLECTION}
${_GRPC_GRPCPP}
${_PROTOBUF_LIBPROTOBUF})
# Targets greeter_[async_](client|server)
foreach(_target
transfer_client transfer_server)
add_executable(${_target} "${_target}.cpp")
target_link_libraries(${_target}
transfer_grpc_proto
${_REFLECTION}
${_GRPC_GRPCPP}
${_PROTOBUF_LIBPROTOBUF})
endforeach()
2.3 服务定义与proto文件
在gRPC中,服务和消息的定义是通过.proto文件进行的。例如,定义一个文件传输服务,可以在transferfile.proto中如下定义:
syntax = "proto3";
package filetransfer;
service FileTransferService {
rpc Upload(stream FileChunk) returns (UploadStatus) {}
}
message FileChunk {
bytes content = 1;
}
message UploadStatus {
bool success = 1;
string message = 2;
}
这里定义了一个FileTransferService服务,包含了一个Upload方法,该方法接受一个FileChunk类型的流,并返回一个UploadStatus状态。
3. 客户端和服务端的实现
客户端和服务端的实现是通过gRPC框架生成的接口进行的,这些接口基于前面定义的.proto文件。
3.1 gRPC客户端实现
客户端的主要职责是打开文件,读取数据,然后以流的形式发送到服务端。实现代码如下:
#include <iostream>
#include <string>
#include <fstream>
#include <chrono>
#include <grpcpp/grpcpp.h>
#include <grpcpp/channel.h>
#include <grpcpp/client_context.h>
#include <grpcpp/create_channel.h>
#include <grpcpp/security/credentials.h>
#include "transferfile.grpc.pb.h"
using grpc::Channel;
using grpc::ClientContext;
using grpc::ClientWriter;
using grpc::Status;
using transferfile::FileChunk;
using transferfile::FileUploadStatus;
using transferfile::TransferFile;
#define CHUNK_SIZE 3 * 1024 * 1024 // 3MB
class TransferClient
{
public:
TransferClient(std::shared_ptr<Channel> channel) : stub_(TransferFile::NewStub(channel)) {}
void uploadFile(const std::string &filename);
private:
std::unique_ptr<TransferFile::Stub> stub_;
};
void TransferClient::uploadFile(const std::string &filename)
{
FileChunk chunk;
char *buffer = new char[CHUNK_SIZE];
FileUploadStatus status;
ClientContext context;
std::ifstream infile;
unsigned long len = 0;
auto start = std::chrono::steady_clock::now();
infile.open(filename, std::ios::binary | std::ios::in);
if (!infile.is_open())
{
std::cerr << "Error: File not found" << std::endl;
return;
}
std::unique_ptr<ClientWriter<FileChunk>> writer(stub_->UploadFile(&context, &status)); // Create a writer to send chunks of file
while (!infile.eof())
{
infile.read(buffer, CHUNK_SIZE);
chunk.set_buffer(buffer, infile.gcount());
if (!writer->Write(chunk))
{
std::cerr << "Error: Failed to write chunk" << std::endl;
break;
}
len += infile.gcount();
}
infile.close();
delete[] buffer;
writer->WritesDone();
Status status1 = writer->Finish();
if (status1.ok() && len != status.length())
{
auto end = std::chrono::steady_clock::now();
std::cout << "File uploaded successfully" << std::endl;
std::cout << "Time taken: " << std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count() << "ms" << std::endl;
std::cout << "File size: " << len << " bytes" << std::endl;
auto speed = (len / std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count()) * 1000 / 1024 / 1024;
std::cout << "Speed: " << speed << " MB/s" << std::endl;
}
else
{
std::cerr << "Error: " << status1.error_message() << "len: " << len << " status.length(): " << status.length()
<< std::endl;
}
}
int main(int argc, char *argv[])
{
if (argc < 2)
{
std::cerr << "Usage: " << argv[0] << " <filename> [server_ip]" << std::endl;
return 1;
}
std::string filename(argv[1]);
std::string server_ip = "localhost";
if (argc == 3)
{
server_ip = argv[2];
}
TransferClient client(grpc::CreateChannel(server_ip + ":50051", grpc::InsecureChannelCredentials()));
client.uploadFile(filename);
return 0;
}
客户端代码展示了如何创建一个gRPC客户端,如何打开文件,如何将文件切割成块,并且如何将这些块通过网络发送到服务端。
3.2 gRPC服务端实现
服务端的实现则负责接收来自客户端的数据块,并将其写入到服务器上的文件中。服务端代码如下:
#include <iostream>
#include <string>
#include <fstream>
#include <grpcpp/grpcpp.h>
#include <grpcpp/server.h>
#include <grpcpp/server_builder.h>
#include <grpcpp/server_context.h>
#include <grpcpp/security/server_credentials.h>
#include "transferfile.grpc.pb.h"
#include <sys/resource.h>
#include <unistd.h>
#include <chrono>
using grpc::Server;
using grpc::ServerBuilder;
using grpc::ServerContext;
using grpc::ServerReader;
using grpc::Status;
using transferfile::FileChunk;
using transferfile::FileUploadStatus;
using transferfile::TransferFile;
using namespace std::chrono;
#define CHUNK_SIZE 3 * 1024 * 1024 // 3MB
class TransferServiceImpl final : public TransferFile::Service
{
public:
Status UploadFile(ServerContext *context, ServerReader<FileChunk> *reader, FileUploadStatus *status) override;
protected:
void printUsage(const struct rusage &start, const struct rusage &end)
{
std::cout << "CPU Usage: User time: " << (end.ru_utime.tv_sec - start.ru_utime.tv_sec) + (end.ru_utime.tv_usec - start.ru_utime.tv_usec) / 1000000.0
<< "s, System time: " << (end.ru_stime.tv_sec - start.ru_stime.tv_sec) + (end.ru_stime.tv_usec - start.ru_stime.tv_usec) / 1000000.0 << "s" << std::endl;
std::cout << "Max resident set size: " << (end.ru_maxrss - start.ru_maxrss) << " KB" << std::endl;
}
};
Status TransferServiceImpl::UploadFile(ServerContext *context, ServerReader<FileChunk> *reader, FileUploadStatus *status)
{
FileChunk chunk;
std::ofstream outfile;
const char *data;
struct rusage usage_start, usage_end;
getrusage(RUSAGE_SELF, &usage_start);
auto start = high_resolution_clock::now();
outfile.open("output.bin", std::ios::binary | std::ios::out | std::ios::trunc);
if (!outfile.is_open())
{
std::cerr << "Error: Failed to open file" << std::endl;
return Status::CANCELLED;
}
while (reader->Read(&chunk))
{
data = chunk.buffer().c_str();
outfile.write(data, chunk.buffer().length());
}
long pos = outfile.tellp();
status->set_length(pos);
outfile.close();
auto end = high_resolution_clock::now();
getrusage(RUSAGE_SELF, &usage_end);
auto duration = duration_cast<milliseconds>(end - start);
printUsage(usage_start, usage_end);
std::cout << "Total transmission time: " << duration.count() << " ms" << std::endl;
std::cout << "Total data transmitted: " << pos << " bytes" << std::endl;
std::cout << "Transmission rate: " << (pos * 1000.0 / duration.count()) / 1024 / 1024 << " MB/s" << std::endl;
return Status::OK;
}
void RunServer()
{
std::string server_address("0.0.0.0:50051");
TransferServiceImpl service;
ServerBuilder builder;
builder.AddListeningPort(server_address, grpc::InsecureServerCredentials());
builder.RegisterService(&service);
std::unique_ptr<Server> server(builder.BuildAndStart());
std::cout << "Server listening on " << server_address << std::endl;
server->Wait();
}
int main(int argc, char **argv)
{
RunServer();
return 0;
}
服务端代码展示了如何创建一个gRPC服务端,如何接收客户端发送的数据块,以及如何将这些数据块写入到磁盘文件中。
3.3 TCP客户端实现
功能同gRPC客户端
#include <iostream>
#include <fstream>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <string>
#include <cstring>
int main(int argc, char *argv[])
{
const char *server_ip = "127.0.0.1";
int server_port = 8888;
std::string file_path = argv[1];
// Create socket
int sock = socket(AF_INET, SOCK_STREAM, 0);
if (sock < 0)
{
std::cerr << "Socket creation failed." << std::endl;
return 1;
}
// Define the server address
struct sockaddr_in server_address;
memset(&server_address, 0, sizeof(server_address));
server_address.sin_family = AF_INET;
server_address.sin_port = htons(server_port);
inet_pton(AF_INET, server_ip, &server_address.sin_addr);
// Connect to the server
if (connect(sock, (struct sockaddr *)&server_address, sizeof(server_address)) < 0)
{
std::cerr << "Connection to server failed." << std::endl;
close(sock);
return 1;
}
std::ifstream file(file_path, std::ios::binary);
if (!file.is_open())
{
std::cerr << "Failed to open file: " << file_path << std::endl;
close(sock);
return 1;
}
// Send file contents
char *buffer = new char[1024];
while (file.read(buffer, sizeof(buffer)) || file.gcount())
{
if (send(sock, buffer, file.gcount(), 0) < 0)
{
std::cerr << "Failed to send data." << std::endl;
break;
}
}
delete[] buffer;
std::cout << "File sent successfully." << std::endl;
file.close();
close(sock);
return 0;
}
3.4 TCP服务端实现
功能同gRPC服务端
#include <iostream>
#include <fstream>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <cstring>
#include <string>
#include <sys/resource.h>
#include <unistd.h>
#include <chrono>
#define CHUNK_SIZE 3 * 1024 * 1024 // 3MB
using namespace std::chrono;
void printUsage(const struct rusage &start, const struct rusage &end)
{
std::cout << "CPU Usage: User time: " << (end.ru_utime.tv_sec - start.ru_utime.tv_sec) + (end.ru_utime.tv_usec - start.ru_utime.tv_usec) / 1000000.0
<< "s, System time: " << (end.ru_stime.tv_sec - start.ru_stime.tv_sec) + (end.ru_stime.tv_usec - start.ru_stime.tv_usec) / 1000000.0 << "s" << std::endl;
std::cout << "Max resident set size: " << (end.ru_maxrss - start.ru_maxrss) << " KB" << std::endl;
}
int main()
{
int server_port = 8888;
const char *output_file = "output_received_file";
// Create socket
int server_sock = socket(AF_INET, SOCK_STREAM, 0);
if (server_sock < 0)
{
std::cerr << "Socket creation failed." << std::endl;
return 1;
}
// Bind socket to IP / port
struct sockaddr_in server_address;
memset(&server_address, 0, sizeof(server_address));
server_address.sin_family = AF_INET;
server_address.sin_port = htons(server_port);
server_address.sin_addr.s_addr = INADDR_ANY;
if (bind(server_sock, (struct sockaddr *)&server_address, sizeof(server_address)) < 0)
{
std::cerr << "Bind failed." << std::endl;
close(server_sock);
return 1;
}
// Listen
if (listen(server_sock, 10) < 0)
{
std::cerr << "Listen failed." << std::endl;
close(server_sock);
return 1;
}
std::cout << "Server is listening on port " << server_port << std::endl;
// Accept connection
struct sockaddr_in client_address;
socklen_t client_len = sizeof(client_address);
int client_sock = accept(server_sock, (struct sockaddr *)&client_address, &client_len);
if (client_sock < 0)
{
std::cerr << "Accept failed." << std::endl;
close(server_sock);
return 1;
}
struct rusage usage_start, usage_end;
getrusage(RUSAGE_SELF, &usage_start);
auto start = high_resolution_clock::now();
std::ofstream file(output_file, std::ios::binary);
if (!file.is_open())
{
std::cerr << "Failed to open file for writing." << std::endl;
close(client_sock);
close(server_sock);
return 1;
}
// Receive data
char *buffer = new char[CHUNK_SIZE];
int bytes_received;
while ((bytes_received = recv(client_sock, buffer, sizeof(buffer), 0)) > 0)
{
file.write(buffer, bytes_received);
}
if (bytes_received < 0)
{
std::cerr << "Error in recv()." << std::endl;
}
else
{
std::cout << "File received successfully." << std::endl;
long pos = file.tellp();
auto end = high_resolution_clock::now();
getrusage(RUSAGE_SELF, &usage_end);
auto duration = duration_cast<milliseconds>(end - start);
printUsage(usage_start, usage_end);
std::cout << "Total transmission time: " << duration.count() << " ms" << std::endl;
std::cout << "Total data transmitted: " << pos << " bytes" << std::endl;
std::cout << "Transmission rate: " << (pos * 1000.0 / duration.count()) / 1024 / 1024 << " MB/s" << std::endl;
}
delete[] buffer;
file.close();
close(client_sock);
close(server_sock);
return 0;
}
4. 性能测试与分析
为了验证gRPC与Protobuf的效率,我设置了一个基准测试,比较使用gRPC和传统TCP直接传输大文件的性能差异。
4.1 测试方法
测试方法包括:
- 准备一定大小的测试文件,这里随机生成了2GB的文件。(
fallocate -l 2G 2GBfile.txt) - 分别使用gRPC和TCP传输此文件,记录所需的总时间和CPU、内存等资源的使用情况。
- 重复测试,确保数据的准确性。
4.1.1 gPRC测试结果

4.1.2 TCP测试结果

4.1.3 多次测试结果
| User time | System time | Max resident set size | Transmission time | Transmission rate | |
|---|---|---|---|---|---|
| gRPC | 0.837348 s | 3.61289 s | 118196 KB | 3.313 s | 618.171 MB/s |
| TCP | 15.0924 s | 64.0648 s | 0 KB | 79.672 s | 25.7054 MB/s |
| gRPC | 0.782648 s | 8.72327 s | 42992 KB | 8.792 s | 232.939 MB/s |
| TCP | 14.2556 s | 61.0553 s | 0 KB | 75.441 s | 27.147 MB/s |
| gRPC | 0.921911 s | 2.25723 s | 44548 KB | 2.340 s | 875.214 MB/s |
| TCP | 14.1333 s | 61.6136 s | 0 KB | 76.090 s | 26.9155 MB/s |
| gRPC | 0.8371 s | 3.73357 s | 130056 KB | 3.565 s | 574.474 MB/s |
| TCP | 14.6751 s | 65.7286 s | 0 KB | 80.590 s | 25.4126 MB/s |
| gRPC | 0.942197 s | 2.74693 s | 36912 KB | 2.601 s | 787.389 MB/s |
| TCP | 18.8037 s | 73.1375 s | 0 KB | 92.526 s | 22.1343 MB/s |
4.2 性能比较结果

4.2.1 CPU 使用
gRPC在CPU使用上明显低于传统的TCP socket方法。这主要因为gRPC内部使用了更现代的HTTP/2协议,它支持多路复用、服务器推送等高效的数据传输机制,而不需要像TCP那样对每个文件传输任务建立单独的连接。此外,gRPC的实现中可能包含了更优化的数据处理路径,减少了上下文切换和系统调用的开销。
4.2.2 内存复用
Max resident set size(最大常驻集大小)表示进程在内存中占用的最大空间。TCP方式的最大常驻集大小一直是0KB,而gRPC分配的比较多,这是由于gRPC框架本身的内存需求,以及可能的内存缓冲机制,这有助于提高数据处理的速率和效率。
4.2.3 传输时间和速率
gRPC在传输速度上极大超过了TCP socket。这种巨大的差异主要来自于gRPC使用HTTP/2的优势,如头部压缩、二进制帧传输和连接复用。HTTP/2的二进制帧结构使得传输更加高效,并减少了因为文本解析带来的开销。此外,连接复用允许在单一连接上并行交换消息,从而显著提升了数据传输效率,减少了因建立和关闭多个TCP连接所产生的延迟和资源消耗。
测试结果显示,使用gRPC和Protobuf传输大文件在多个方面均优于传统TCP方法:
- 传输速度: gRPC利用HTTP/2的多路复用功能,可以在一个连接中并行传输多个文件,显著提升了传输效率。
- 资源利用率: gRPC的传输过程中CPU利用率较低,内存复用率较高,更适合长时间运行的应用场景。
- 错误处理: gRPC内置的错误处理机制能有效地管理网络问题和数据传输错误,保证数据的完整性。
- 高效的数据序列化: Protobuf非常高效,生成的数据包体积小,通常比相等的XML小3到10倍。这意味着在网络上传输相同的数据量时,Protobuf需要的带宽更少。
- 快速序列化与反序列化: Protobuf提供了非常快的数据序列化和反序列化能力,这对于性能要求高的应用尤其重要,可以显著减少数据处理时间。
- 明确的结构定义: 使用Protobuf可以让数据结构更加清晰和严格,有助于团队内部的沟通和后期的维护。
- 避免手动解析:与自定义的二进制格式相比,Protobuf避免了手动解析数据的错误和复杂性,因为解析工作是自动化的,由工具链支持。
5. 结论
使用gRPC和Protobuf传输大文件,不仅提高了传输速度,而且确保了更高的可靠性和更低的资源消耗。这使得gRPC成为大规模数据处理和分布式系统中的理想选择。未来,随着技术的进一步成熟和优化,预计gRPC在更多场景中将显示出其优越性。
希望本文对于那些寻求改进大文件传输性能的开发者有所帮助,并能够启发更多的技术创新和应用。