本文介绍 遥感影像的一般处理流程。
1 遥感影像分级
| 影像级别 | 说明 |
|---|---|
| 0级 | 原始数据产品(分景后的卫星下传遥感数据) |
| 1级 | 辐射校正产品(经传感器辐射校正,而未几何校正的产品,用户拿到的一般都是1级) |
| 2级 | 系统几何校正产品(经辐射校正和系统几何校正,并将校正后的影像映射到指定的地图投影坐标系下) |
| 3级 | 几何精校正产品(采用地面控制点改进产品的几何精度) |
| 4级 | 高程校正产品(采用DEM纠正了地势起伏造成的视差) |
| 5级 | 标准镶嵌图像产品(无缝镶嵌图像产品) |
2 遥感影像处理
2.1 一般流程
| 序号 | 步骤 | 类型或方法 | 说明 | |
|---|---|---|---|---|
| 一 | 预处理 | 包括降噪处理、薄云处理、阴影处理等 | ||
| 降噪处理 | 周期性和尖锐噪声 | 带通或者槽形滤波消除。消除尖峰噪声用傅立叶变换进行滤波处理比较方便 | ||
| 去除坏线和条带 | 采用傅里叶变换和低通滤波进行消除或减弱 | |||
| 薄云处理 | 修改照度增益、反射率增益、截取频率这三个参数 | |||
| 阴影处理 | 采用比值法进行消除 | |||
| 二 | 几何校正 | 一般获取的遥感影像是1级产品(已做辐射处理)。为使其定位准确,须进行几何精纠正;在地形起伏较大地区,还须做正射纠正;特殊情况下还须进行大气纠正(基于辐射传输方程的大气校正、基于地面场地数据或辅助数据进行辐射校正) | ||
| 影像配准 | 影像对栅格图像的配准 | 遥感影像配准到另一幅影像或栅格地图 | ||
| 影像对矢量图形的配准 | 遥感影像配准到一幅矢量图形 | |||
| 几何粗校正 | 按常规处理方案,结合卫星运行姿态、传感器性能指标、大气状态、太阳高度角对影像几何畸变进行校正 | |||
| 几何精校正 | 影像对影像的纠正 | 利用已有遥感影像对原始影像进行纠正,使其具有准确的地理坐标和投影信息 | ||
| 影像对地图(矢量或栅格)的纠正 | 利用已有扫描或矢量地形图对原始遥感影像进行纠正,使其具有准确的地理坐标和投影信息 | |||
| 影像对已知点(控制点)的纠正 | 利用已知点或地面控制点对原始遥感影像进行纠正,使其具有准确的地理坐标和投影信息 | |||
| 正射纠正 | 利用已有地理参考数据(影像、地形图和控制点)和数字高程模型数据(DEM、GDEM)对原始遥感影像进行纠正,消除或减弱地形起伏带来的变形,使遥感影像具有准确的地面坐标和投影信息 | |||
| 三 | 图像增强 | 为使遥感图像所包含的地物信息可读性更强,感兴趣目标更突出,需要对遥感图像进行增强处理 | ||
| 彩色合成 | 真彩色合成图像(如TM321)与假彩色合成图像(如TM432) | |||
| 直方图变换 | 直方图均衡化 | 将随机分布的直方图修改成均匀分布的直方图,实质是对图像做非线性拉伸,重新分配像元值,使一定灰度范围内的像元数量大致相等 | ||
| 直方图正态化 | 将随机分布的原图像直方图修改成正态(或近似)正态分布直方图 | |||
| 密度分割 | 将灰度图像按像元灰度值分级赋值形成伪彩色图像,达到图像增强的目的 | |||
| 灰度颠倒 | 将图像灰度范围先拉伸至饱和(如0~255),然后再进行颠倒,使正、负像互换 | |||
| 图像间运算 | 两幅或多幅单波段影像,空间配准后进行算术运算(加法、减法、比值和综合运算)实现影像增强 | |||
| 图像融合 | 将多源遥感数据(不同空间分辨率、波普分辨率、时间分辨率)在统一地理坐标系中,采用一定算法生成一组新的信息或合成图像的过程(如全色图像融合进多光谱图像) | |||
| 领域增强 | 即滤波处理,滤波器常取3×3或5×5,可用于去噪声、图像平滑、锐化和相关运算 | |||
| 主成分分析 | 也叫PCA变换,可消除特征向量间的相关性并进行特征选择。主成分分析还可用来进行高光谱图像数据的压缩和信息融合 | |||
| K-T变换 | 即Kauth-Thomas变换,又称为“缨帽变换”。此变换着眼于农作物生长过程而区别于其他植被覆盖,力争抓住地面景物在多光谱空间中的特征 | |||
| 四 | 影像裁剪 | 在日常遥感应用中,我们只对影像中特定范围内的信息感兴趣,这就需要将遥感影像裁减成研究范围的大小 | ||
| 按ROI裁剪 | 按ROI(感兴趣区域)范围裁减影像 | |||
| 按文件裁剪 | 按指定影像文件的范围进行裁剪 | |||
| 按地图裁剪 | 按地图的地理坐范围进行裁剪 | |||
| 五 | 影像镶嵌和匀色 | 影像镶嵌即影像拼接;匀色处理可使影像色彩均衡 | ||
| 影像镶嵌 | 即影像拼接,将两幅或多幅数字影像拼接构成一幅整体图像的过程。先对每幅图像进行几何校正规划到统一坐标系中,再对它们进行裁剪去掉重叠部分,最后将裁剪后的多幅影像拼接成一幅大幅面影像 | |||
| 影像匀色 | 用于镶嵌的影像经常来源于不同传感器、不同时相的遥感数据,导致镶嵌时出现色调不一致的现象,这时需结合实际情况和整体协调性对参与镶嵌的影像进行匀色处理(如直方图均衡化、直方图匹配) | |||
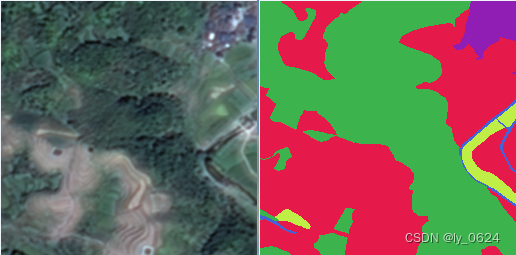
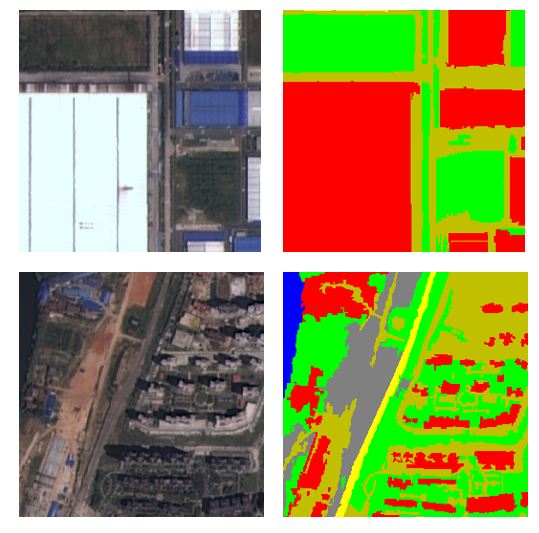
| 六 | 遥感信息提取 | 依据遥感影像的地物特征,识别地物类型、性质、空间位置、形状、大小等属性的过程即为遥感信息提取,目前主要有目视判读法和计算机分类法(基于图像的灰度),且目视判读是最常用的方法 | ||
| 目视判读 | 人工解译提取遥感影像信息 | |||
| 计算机图像分类 | 监督分类 | 根据已知的样本类别和类别先验知识,确定判别函数和判别准则,训练分类器;然后将未知类别的样本带入判别函数依据判别准则对其分类 | ||
| 非监督分类 | 事先未对分类过程施加先验知识,仅凭遥感影像地物的光谱特征分布规律,即自然聚类的特性进行“盲目”分类(不能确定类别属性) | |||
| 其他分类方法 | 如模糊聚类算法、神经元网络方法、面向对象分类技术等 | |||
2.2 串讲流程
我们用户一般拿到的都是1级遥感影像,也即是经过了地面接收站处理中心进行辐射处理过后的遥感影像数据。遥感影像的处理流程主要包括六步:预处理、几何校正、图像增强、影像剪裁、影像镶嵌和匀色以及遥感信息提取。
第一步、预处理。预处理就是用户使用数字图像处理方法对遥感影像进行降噪处理、薄云处理和阴影处理等。其中,薄云处理可通过修改照度增益、反射率增益或截取频率等参数进行;阴影处理一般通过比值法进行。
第二步、几何校正。遥感影像的几何校正包括几何粗校正和几何精校正。几何粗校正就是基于传感器的构象方程,利用成像瞬间传感器的外方位元素和扫描角等纠正传感器的内部畸变;几何精校正则是基于构像方程,利用地面控制点解求构像模型的未知参数,实现图像坐标到地面坐标的转换,其方法包括多项式法、共线方程法和有理函数模型法等。
第三步、图像增强。遥感图像增强是为了特定目的,突出遥感图像中的某些信息,削弱或除去某些不需要的信息,使图像更易判读。图像增强主要包括直方图变换、图像间运算和图像融合等方法。其中,直方图变换包括直方图均衡化、正态化以及密度分割、灰度反转等。
第四步、影像剪裁。在遥感应用中,我们只对影像中特定范围内的信息感兴趣,这就需要将影像裁剪成研究范围的大小,包括按ROI裁剪、按文件裁剪和按地图裁剪等。
第五步、影像镶嵌和匀色。来自不同传感器、不同时相的多源遥感影像拼接形成一幅整体影像后会存在色调不一致的现象,这时需要进行均色处理以保持色调一致、色彩均衡。
第六步、遥感信息的提取。遥感信息的提取属于遥感影像的利用范畴,包括人工目视判读和计算机图像分类。目视判读即用人眼解译提取遥感影像的信息;图像分类包括监督分类和非监督分类,使用计算机自动分类大大降低了人力成本。
实际上,遥感影像处理是一个灵活的过程,需要根据具体任务和目标进行调整。
3 参考文献
1. 孙家抦.遥感原理与应用[M].武汉:武汉大学出版社,2013.
2. 公众号文章:遥感影像数据处理流程.