一、连续系统的时域分析
如电路工作,信号传播就是连续系统
1.1 系统的概念
线性系统与非线性系统
同时满足可加性和齐次性的系统称为线性系统,如:
若 f 1 ( t ) → y 1 ( t ) , f 2 ( t ) → y 2 ( t ) 若f_1(t) \rightarrow y_1(t),f_2(t) \rightarrow y_2(t) 若f1(t)→y1(t),f2(t)→y2(t)
对于任意常数 a 1 a_1 a1和 a 2 a_2 a2,有
a 1 f 1 ( t ) + a 2 f 2 ( t ) → a 1 y 1 ( t ) + a 2 y 2 ( t ) a_1f_1(t) + a_2f_2(t) \rightarrow a_1y_1(t)+a_2y_2(t) a1f1(t)+a2f2(t)→a1y1(t)+a2y2(t)
不满足以上关系为非线性系统时不变系统
如果系统元件参数不随时间变化的则称为时不变系统:
若 f ( t ) → y ( t ) 则 f ( t − t 0 ) → y ( t − t 0 ) \begin{align*} & 若f(t) \rightarrow y(t) \\ & 则f(t-t_0) \rightarrow y(t-t_0) \end{align*} 若f(t)→y(t)则f(t−t0)→y(t−t0)
如果系统既是线性的也是时不变的,则称为线性时不变系统(LTI)因果系统
如果在激励信号作用之前系统不产生响应,这样的系统称为因果系统
1.2 常用基本信号
直流信号
f ( t ) = A ( − ∞ < t < ∞ ) f(t)=A(-\infty<t<\infty) f(t)=A(−∞<t<∞)正弦信号
f ( t ) = A sin ( ω t + φ ) f(t)=A \sin( \omega t + φ) f(t)=Asin(ωt+φ)单位阶跃信号
ε ( t ) = { 1 ( t > t 0 ) 0 ( t < t 0 ) \varepsilon(t)= \begin{cases} 1 \quad (t>t_0) \\ 0 \quad (t<t_0) \end{cases} ε(t)={1(t>t0)0(t<t0)斜坡信号
r ( t ) = { t ( t ≥ t 0 ) 0 ( t < t 0 ) r(t)= \begin{cases} t \quad (t \geq t_0) \\ 0 \quad (t<t_0) \end{cases} r(t)={t(t≥t0)0(t<t0)单位冲激信号(又称狄拉克函数)
{ δ ( t ) = 0 t ≠ 0 ∫ − ∞ ∞ δ ( t ) d t = 1 \begin{cases} \delta(t)=0 \quad t\not=0 \\ \int_{-\infty}^\infty {\delta(t)} \,{\rm d}t=1 \end{cases} {δ(t)=0t=0∫−∞∞δ(t)dt=1指数信号
f ( t ) = A e − α t ( α > 0 , t > 0 ) f(t)=Ae^{-\alpha t} \quad (\alpha>0,t>0) f(t)=Ae−αt(α>0,t>0)复指数信号
f ( t ) = A e ( α + j ω ) t f(t)=Ae^{(\alpha + j \omega)t} f(t)=Ae(α+jω)t
根据欧拉公式:
e j ω t = cos ω t + j sin ω t e − j ω t = cos ω t − j sin ω t e^{j\omega t}=\cos \ \omega t+j\sin \ \omega t\qquad e^{-j\omega t}=\cos \ \omega t-j\sin \ \omega t ejωt=cos ωt+jsin ωte−jωt=cos ωt−jsin ωt
可得:
f ( t ) = A e α t ( cos ω t + j sin ω t ) f(t)=Ae^{\alpha t}(\cos \ \omega t+j\sin \ \omega t) f(t)=Aeαt(cos ωt+jsin ωt)
1.3 卷积
1.3.1 卷积的定义
首先任意信号 f ( t ) f(t) f(t)都可以表示为冲激信号的线性组合,如
f ( t ) = ∫ − ∞ ∞ f 1 ( τ ) δ ( t − τ ) d τ f(t)=\int_{-\infty}^\infty {f_1(\tau)\delta(t-\tau)} \,{\rm d}\tau f(t)=∫−∞∞f1(τ)δ(t−τ)dτ
此时设定义在(-∞,∞)上的两个函数 f 1 ( t ) f_1(t) f1(t)和 f 2 ( t ) f_2(t) f2(t),则积分
y ( t ) = ∫ − ∞ ∞ f 1 ( τ ) f 1 ( t − τ ) d τ y(t)=\int_{-\infty}^\infty {f_1(\tau)f_1(t-\tau)} \,{\rm d}\tau y(t)=∫−∞∞f1(τ)f1(t−τ)dτ
称为 f 1 ( t ) f_1(t) f1(t)和 f 2 ( t ) f_2(t) f2(t)的卷积,并记为
y ( t ) = f 1 ( t ) ∗ f 2 ( t ) y(t)=f_1(t)*f_2(t) y(t)=f1(t)∗f2(t)
1.3.2 卷积的性质
分配律
[ f 1 ( t ) + f 2 ( t ) ] ∗ f 3 ( t ) = f 1 ( t ) ∗ f 3 ( t ) + f 2 ( t ) ∗ f 3 ( t ) [f_1(t)+f_2(t)]*f_3(t)=f_1(t)*f_3(t)+f_2(t)*f_3(t) [f1(t)+f2(t)]∗f3(t)=f1(t)∗f3(t)+f2(t)∗f3(t)微分性质
若
y ( t ) = f 1 ( t ) ∗ f 2 ( t ) y(t)=f_1(t)*f_2(t) y(t)=f1(t)∗f2(t)
则
y ′ ( t ) = f 1 ( t ) ∗ f 2 ′ ( t ) = f 1 ′ ( t ) ∗ f 2 ( t ) y'(t)=f_1(t)*f_2'(t)=f_1'(t)*f_2(t) y′(t)=f1(t)∗f2′(t)=f1′(t)∗f2(t)积分性质
y ( − 1 ) ( t ) = f 1 ( t ) ∗ f 2 ( − 1 ) ( t ) = f 1 ( − 1 ) ( t ) ∗ f 2 ( t ) y^{(-1)}(t)=f_1(t)*f_2^{(-1)}(t)=f_1^{(-1)}(t)*f_2(t) y(−1)(t)=f1(t)∗f2(−1)(t)=f1(−1)(t)∗f2(t)延迟性质
f 1 ( t − t 1 ) ∗ f 2 ( t − t 2 ) = y ( t − t 1 − t 2 ) f_1(t-t_1)*f_2(t-t_2)=y(t-t_1-t_2) f1(t−t1)∗f2(t−t2)=y(t−t1−t2)
1.3.3 常用信号卷积表
| f 1 ( t ) f_1(t) f1(t) | f 2 ( t ) f_2(t) f2(t) | f 1 ( t ) ∗ f 2 ( t ) f_1(t)*f_2(t) f1(t)∗f2(t) |
|---|---|---|
| f ( t ) f(t) f(t) | δ ( t ) \delta(t) δ(t) | f ( t ) f(t) f(t) |
| ε ( t ) \varepsilon(t) ε(t) | ε ( t ) \varepsilon(t) ε(t) | t ε ( t ) t\varepsilon(t) tε(t) |
| t ε ( t ) t\varepsilon(t) tε(t) | ε ( t ) \varepsilon(t) ε(t) | 1 2 t 2 ε ( t ) \frac{1}{2}t^2\varepsilon(t) 21t2ε(t) |
| e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) e−αtε(t) | ε ( t ) \varepsilon(t) ε(t) | 1 α ( 1 − e − α t ) ε ( t ) \frac{1}{\alpha}(1-e^{-\alpha t})\varepsilon(t) α1(1−e−αt)ε(t) |
| e − α 1 t ε ( t ) e^{-\alpha 1 t}\varepsilon(t) e−α1tε(t) | e − α 2 t ε ( t ) e^{-\alpha 2 t}\varepsilon(t) e−α2tε(t) | 1 α 2 − α 1 ( e − α 1 t − e − α 2 t ) ε ( t ) \frac{1}{\alpha 2-\alpha 1}(e^{-\alpha 1 t}-e^{-\alpha 2 t})\varepsilon(t) α2−α11(e−α1t−e−α2t)ε(t) |
| e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) e−αtε(t) | e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) e−αtε(t) | t e − α t ε ( t ) te^{-\alpha t}\varepsilon(t) te−αtε(t) |
| t ε ( t ) t\varepsilon(t) tε(t) | e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) e−αtε(t) | a t − 1 a 2 ε ( t ) + 1 a 2 e − α t ) ε ( t ) \frac{at-1}{a^2}\varepsilon(t)+\frac{1}{a^2}e^{-\alpha t})\varepsilon(t) a2at−1ε(t)+a21e−αt)ε(t) |
| t e − α t ε ( t ) te^{-\alpha t}\varepsilon(t) te−αtε(t) | e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) e−αtε(t) | 1 2 t 2 e − α t ε ( t ) \frac{1}{2}t^2e^{-\alpha t}\varepsilon(t) 21t2e−αtε(t) |
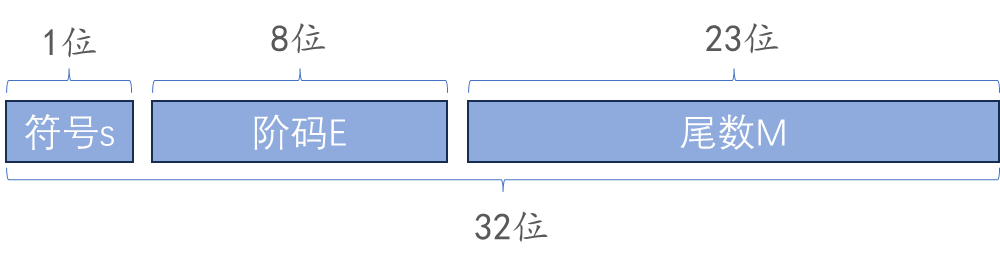
二、傅里叶变换
傅里叶变换主要是利用傅里叶级数,可以让任意信号变成多次谐波的正弦信号之和的特点,从而对系统进行频域分析。此时就可以直接分析连续系统的频域特性,将其进行傅里叶反变换从而直接得到时域特性。
三、拉普拉斯变换
拉普拉斯变换就是在傅里叶变换的推广下,进行复频域分析,更加简化时域系统分析。
四、离散系统的时域分析
离散系统通常为软件上的处理,如对一些A/D转换的数字信号的处理
4.1 时域离散信号
- 单位脉冲序列
δ ( n ) = { 1 ( n = 0 ) 0 ( n ≠ 0 ) \delta(n)= \begin{cases} 1 \quad (n=0) \\ 0 \quad (n \not=0 ) \end{cases} δ(n)={1(n=0)0(n=0) - 单位阶跃序列
ε ( n ) = { 1 ( n ⩾ 0 ) 0 ( n < 0 ) \varepsilon(n)= \begin{cases} 1 \quad (n\geqslant 0) \\ 0 \quad (n<0) \end{cases} ε(n)={1(n⩾0)0(n<0)
其与单位脉冲序列的关系
δ ( n ) = ε ( n ) − ε ( n − 1 ) ε ( n ) = ∑ k = 0 ∞ δ ( n − k ) \delta(n)=\varepsilon(n)-\varepsilon(n-1) \\ \varepsilon(n)=\sum_{k=0}^\infty \delta(n-k) δ(n)=ε(n)−ε(n−1)ε(n)=k=0∑∞δ(n−k)
令n-k=m,代入上式
ε ( n ) = ∑ m = − ∞ n δ ( m ) \varepsilon(n)=\sum_{m=-\infty}^n \delta(m) ε(n)=m=−∞∑nδ(m) - 矩形序列
f N ( n ) = { 1 ( 0 ⩽ n ⩽ N − 1 ) 0 其他 f_N(n)= \begin{cases} 1 \quad (0\leqslant n\leqslant N-1) \\ 0 \quad \text {其他} \end{cases} fN(n)={1(0⩽n⩽N−1)0其他
用单位阶跃序列表示
f N ( n ) = ε ( n ) − ε ( n − N ) f_N(n)=\varepsilon(n)-\varepsilon(n-N) fN(n)=ε(n)−ε(n−N) - 正弦序列
f ( n ) = A sin ( ω n ) f(n)=A \sin( \omega n) f(n)=Asin(ωn)
式中 ω ω ω为数字角频率, ω = Ω T ω=Ω T ω=ΩT, T T T为取样周期。由于采样频率 F s = 1 / T F_s=1/T Fs=1/T,所以
ω = Ω / F s ω=Ω/F_s ω=Ω/Fs - 指数序列
f ( n ) = a n ε ( n ) f(n)=a^n \varepsilon(n) f(n)=anε(n) - 复指数序列
f ( n ) = e ( σ + j w 0 ) n f(n)=e^{(σ+jw_0)n} f(n)=e(σ+jw0)n
当 σ = 0 σ=0 σ=0有
f ( n ) = e j w 0 n = cos ( w 0 n ) + j sin ( w 0 n ) f(n)=e^{jw_0n}=\cos(w_0n)+j\sin(w_0n) f(n)=ejw0n=cos(w0n)+jsin(w0n)
由于n取整数,则下面等式成立
e j ( w 0 + 2 π M ) n = e j w 0 n e^{j(w_0+2πM)n}=e^{jw_0n} ej(w0+2πM)n=ejw0n - 周期序列
周期为N的周期序列
x ( n ) = x ( n + N ) − ∞ ⩽ n ⩽ ∞ x(n)=x(n+N) \quad -\infty \leqslant n \leqslant \infty x(n)=x(n+N)−∞⩽n⩽∞
4.2 卷积和
4.2.1 卷积和的定义
离散信号 f ( n ) f(n) f(n)可以表示为单位序列的线性组合,如
f ( n ) = ∑ k = − ∞ ∞ f ( k ) δ ( n − k ) f(n)=\sum_{k=-\infty}^\infty f(k)\delta(n-k) f(n)=k=−∞∑∞f(k)δ(n−k)
那么对于离散信号 f 1 ( n ) f_1(n) f1(n)和 f 2 ( n ) f_2(n) f2(n),二者的卷和定义为
f 1 ( n ) ∗ f 2 ( n ) = ∑ k = − ∞ ∞ f 1 ( k ) f 2 ( n − k ) f_1(n)*f_2(n)=\sum_{k=-\infty}^\infty f_1(k)f_2(n-k) f1(n)∗f2(n)=k=−∞∑∞f1(k)f2(n−k)
对于因果信号则有
f 1 ( n ) ∗ f 2 ( n ) = ∑ k = 0 n f 1 ( k ) f 2 ( n − k ) f_1(n)*f_2(n)=\sum_{k=0}^n f_1(k)f_2(n-k) f1(n)∗f2(n)=k=0∑nf1(k)f2(n−k)
4.2.2 常见序列卷和表
| f 1 ( n ) f_1(n) f1(n) | f 2 ( n ) f_2(n) f2(n) | f 1 ( n ) ∗ f 2 ( n ) f_1(n)*f_2(n) f1(n)∗f2(n) |
|---|---|---|
| δ ( n ) \delta(n) δ(n) | f ( n ) f(n) f(n) | f ( n ) f(n) f(n) |
| a n a^n an | ε ( n ) \varepsilon(n) ε(n) | ( 1 − a n + 1 ) / ( 1 − a ) (1-a^{n+1})/(1-a) (1−an+1)/(1−a) |
| ε ( n ) ε(n) ε(n) | ε ( n ) ε(n) ε(n) | n + 1 n+1 n+1 |
| e λ n e^{λn} eλn | ε ( n ) ε(n) ε(n) | [ 1 − e λ ( n + 1 ) ] / ( 1 − e λ ) [1-e^{λ(n+1)}]/(1-e^λ) [1−eλ(n+1)]/(1−eλ) |
| a 1 n a_1^n a1n | a 2 n a_2^n a2n | ( a 1 n + 1 − a 2 n + 1 ) / ( a 1 − a 2 ) ( a 1 ≠ a 2 ) (a_1^{n+1}-a_2^{n+1})/(a_1-a_2)(a_1\not= a_2) (a1n+1−a2n+1)/(a1−a2)(a1=a2) |
| a n a^n an | a n a^n an | ( n + 1 ) a n (n+1)a^n (n+1)an |
| e λ 1 n e^{λ_1n} eλ1n | e λ 2 n e^{λ_2n} eλ2n | [ e λ 1 ( n + 1 ) − e λ 2 ( n + 1 ) ] / ( e λ 1 − e λ 2 ) ( λ 1 ≠ λ 2 ) [e^{λ_1(n+1)}-e^{λ_2(n+1)}]/(e^{λ_1}-e^{λ_2})(λ_1\not= λ_2) [eλ1(n+1)−eλ2(n+1)]/(eλ1−eλ2)(λ1=λ2) |
| e λ n e^{λn} eλn | e λ n e^{λn} eλn | ( n + 1 ) e λ n (n+1)e^{λn} (n+1)eλn |
| n | n | 1 6 ( n − 1 ) n ( n + 1 ) \frac{1}{6}(n-1)n(n+1) 61(n−1)n(n+1) |
| n | ε ( n ) ε(n) ε(n) | n ( n + 1 ) / 2 n(n+1)/2 n(n+1)/2 |
五、Z变换
如拉普拉斯变换,Z变换可以把差分方程变为代数方程,从而使离散系统的分析得以简化
5.1 Z变换的定义
首先用冲激序列 δ T ( t ) δ_T(t) δT(t)对 f ( t ) f(t) f(t)进行取样,则取样信号 f s ( t ) f_s(t) fs(t)为
f s ( t ) = f ( t ) δ T ( t ) = f ( t ) ∑ n = − ∞ ∞ δ ( t − n T ) = ∑ n = − ∞ ∞ f ( n T ) δ ( t − n T ) f_s(t)=f(t)δ_T(t)=f(t)\sum_{n=-\infty}^\infty \delta(t-nT) \\ =\sum_{n=-\infty}^\infty f(nT)\delta(t-nT) fs(t)=f(t)δT(t)=f(t)n=−∞∑∞δ(t−nT)=n=−∞∑∞f(nT)δ(t−nT)
得到离散信号之后取拉式变化为
F ( s ) = L [ ∑ n = − ∞ ∞ f ( n T ) δ ( t − n T ) ] = ∑ n = − ∞ ∞ f ( n T ) e − n s T F(s)=L[\sum_{n=-\infty}^\infty f(nT)\delta(t-nT)]=\sum_{n=-\infty}^\infty f(nT)e^{-nsT} F(s)=L[n=−∞∑∞f(nT)δ(t−nT)]=n=−∞∑∞f(nT)e−nsT
令 z = e s T z=e^{sT} z=esT,将 f ( n T ) f(nT) f(nT)换为 f ( n ) f(n) f(n),且给定序列从 n = 0 n=0 n=0开始有
F ( z ) = ∑ n = 0 ∞ f ( n ) z − n F(z)=\sum_{n=0}^\infty f(n)z^{-n} F(z)=n=0∑∞f(n)z−n
上式为单边Z变换,此时原函数为
f ( n ) = 1 2 π j ∮ C F ( z ) z n − 1 d z f(n)=\frac{1}{2πj} \oint_C {F(z)z^{n-1} }\,{\rm d}z f(n)=2πj1∮CF(z)zn−1dz
这对变换关系简记为
f ( n ) ⟷ F ( z ) f(n)\longleftrightarrow F(z) f(n)⟷F(z)
5.2 常用序列Z变换
| f ( n ) , n ⩾ 0 f(n),n\geqslant 0 f(n),n⩾0 | F ( z ) F(z) F(z) | 收敛域 |
|---|---|---|
| δ ( n ) \delta(n) δ(n) | 1 | ∣ z ∣ > 0 \mid z \mid >0 ∣z∣>0 |
| ε ( n ) ε(n) ε(n) | ||
| n n n | ||
| n 2 n^2 n2 | ||
| n a n na^n nan | ||
| e a n e^{an} ean | ||
| e j ω n e^{jωn} ejωn | ||
| sin ( ω n ) \sin(ωn) sin(ωn) | ||
| cos ( ω n ) \cos(ωn) cos(ωn) | ||
| A a n − 1 ε ( n − 1 ) Aa^{n-1}ε(n-1) Aan−1ε(n−1) | ||
| ( n m − 1 ) a n − m + 1 ε ( n ) \begin{pmatrix} n \\ m-1 \end{pmatrix} a^{n-m+1}ε(n) (nm−1)an−m+1ε(n) |
注: ( n m − 1 ) = 1 ( m − 1 ) ! n ( n − 1 ) ⋯ ( n − m + 2 ) , ω = Ω T \begin{pmatrix} n \\ m-1 \end{pmatrix}=\begin{matrix}1\\ \hline (m-1)! \\\end{matrix} n(n-1)\cdots(n-m+2),ω=ΩT (nm−1)=1(m−1)!n(n−1)⋯(n−m+2),ω=ΩT为数字角频率
5.3 Z变换的主要性质
| 名称 | 时域 | z域 |
|---|---|---|
| 线性 | a 1 f 1 ( n ) + a 2 f 2 ( n ) a_1f_1(n)+a_2f_2(n) a1f1(n)+a2f2(n) | a 1 F 1 ( z ) + a 2 F 2 ( z ) a_1F_1(z)+a_2F_2(z) a1F1(z)+a2F2(z) |
| 移位 | ||
| 卷和定理 | ||
| 尺度变换 | ||
| 序列求和 | ||
| F ( z ) F(z) F(z)微分 | ||
| 初值定理 | ||
| 终值定理 |
六、离散傅里叶变换(DFT)
6.1 时域离散信号的傅里叶变换(DTFT)
6.1.1 序列傅里叶变换定义
对离散序列 f ( n ) f(n) f(n),其双边Z变换对为
F ( z ) = ∑ n = − ∞ ∞ f ( n ) z − n (6 - 1) F(z)=\sum_{n=-\infty}^\infty f(n)z^{-n}\tag{6 - 1} F(z)=n=−∞∑∞f(n)z−n(6 - 1)
f ( n ) = 1 2 π j ∮ C F ( z ) z n − 1 d z (6 - 2) f(n)=\frac{1}{2πj} \oint_C {F(z)z^{n-1} }\,{\rm d}z\tag{6 - 2} f(n)=2πj1∮CF(z)zn−1dz(6 - 2)
令 z = e j ω z=e^{jω} z=ejω代入6-2式
F ( e j ω ) = F ( z ) ∣ z = e j ω = ∑ n = − ∞ ∞ f ( n ) e − j ω F(e^{jω})= F(z)| _{z=e^{jω}}=\sum_{n=-\infty}^\infty f(n)e^{-jω} F(ejω)=F(z)∣z=ejω=n=−∞∑∞f(n)e−jω
由s-z平面可知,Z是一个复变量,DTFT是Z变换在单位圆 ∣ z ∣ = 1 |z|=1 ∣z∣=1上的特殊情况。 F ( e j ω ) F(e^{jω}) F(ejω)称为序列 f ( n ) f(n) f(n)的时域离散信号的傅里叶变换,它既是 ω ω ω的连续函数,又是以 2 π 2π 2π为周期的周期函数。
对应的反变换定义为
f ( n ) = 1 2 π ∫ − ∞ ∞ F ( e j ω ) e j n ω d ω f(n)=\frac{1}{2π} \int_{-\infty}^\infty {F(e^{jω})e^{jnω} }\,{\rm d}ω f(n)=2π1∫−∞∞F(ejω)ejnωdω
对应关系简记为
F ( e j ω ) = D T F T [ f ( n ) ] f ( n ) = I D T F T [ F ( e j ω ) ] F(e^{jω})= DTFT[f(n)] \\ f(n)=IDTFT[F(e^{jω})] F(ejω)=DTFT[f(n)]f(n)=IDTFT[F(ejω)]
特别对于响应 h ( n ) h(n) h(n),则有频率特性
H ( e j ω ) = ∑ n = − ∞ ∞ h ( n ) e − j ω H(e^{jω})=\sum_{n=-\infty}^\infty h(n)e^{-jω} H(ejω)=n=−∞∑∞h(n)e−jω
6.1.2 基本序列傅里叶变换
| 序列 | 傅里叶变换 |
|---|---|
| δ ( n ) \delta(n) δ(n) |
6.1.3 序列傅里叶变换的主要性质
| 名称 | 时域 | 频域 |
|---|---|---|
| 线性 |
6.2 离散傅里叶变换的定义
对于有限长序列可以采用离散傅里叶变换,DFT实质是有限长序列傅里叶变换的有限点离散采样,从而实现了频域离散化。设 x ( n ) x(n) x(n)是一个长度为 M M M的有限长序列,则定义 x ( n ) x(n) x(n)的 N N N点的离散傅里叶变换为:
X ( k ) = D F T [ x ( n ) ] = ∑ n = 0 N − 1 x ( n ) W N k n k = 0 , 1 , ⋯ , N − 1 X(k)=DFT[x(n)]=\sum_{n=0}^{N-1} x(n)W_N^{kn} \qquad k=0,1,\cdots,N-1 X(k)=DFT[x(n)]=n=0∑N−1x(n)WNknk=0,1,⋯,N−1
其逆变换为
x ( n ) = I D F T [ X ( k ) ] = 1 N ∑ n = 0 N − 1 X ( k ) W N − k n n = 0 , 1 , ⋯ , N − 1 x(n)=IDFT[X(k)]=\frac {1}{N}\sum_{n=0}^{N-1} X(k)W_N^{-kn} \qquad n=0,1,\cdots,N-1 x(n)=IDFT[X(k)]=N1n=0∑N−1X(k)WN−knn=0,1,⋯,N−1
式中 W N = e − j 2 π N W_N=e^{-j\frac {2π}{N}} WN=e−jN2π, N N N称为DFT变换区间长度, N ⩾ M N \geqslant M N⩾M。
比较傅里叶变换与Z变换,可以看出DFT是 X ( n ) X(n) X(n)的Z变换在单位圆上的N点等间隔采样。是傅里叶变换 X ( e j ω ) X(e^{jω}) X(ejω)在区间 [ 0 , 2 π ] [0,2π] [0,2π]上的N点等间隔采样。所以离散傅里叶变换的特点是频域是离散的
6.3 离散傅里叶变换的基本性质
6.3.1 DFT隐含周期性
6.3.2 线性性质
6.3.3 循环移位性质
- 序列移位
- 时域移位
- 频域移位
6.3.4 循环卷积定理
- 两个有限长序列的循环卷积
- 循环卷积定理
6.3.5 共轭对称性
- 复共轭序列的DFT
- 有限长共轭对称序列和反对称序列
- 共轭对称性