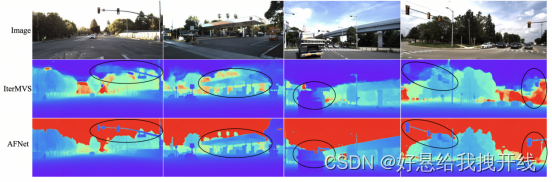
Adaptive Fusion of Single-View and Multi-View Depth for Autonomous Driving
提出了一个单、多视图融合深度估计系统,它自适应地集成了高置信度的单视图和多视图结果
动态选择两个分支之间的高置信度区域执行融合
提出了一个双分支网络,即一个以单目深度线索为目标,而另一个利用多视图几何结构,两个分支都预测深度图和置信度图
通过使用这样的置信度图来执行逐像素融合,可以最终实现更稳健的深度
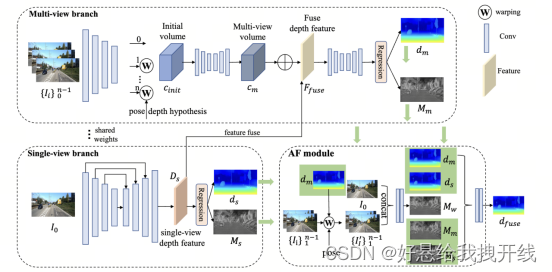
AFNet,它由三个部分组成,即单视图深度模块、多视图深度模块和自适应融合模块




![[<span style='color:red;'>论文</span><span style='color:red;'>阅读</span>]Multimodal Virtual Point <span style='color:red;'>3</span><span style='color:red;'>D</span> Detection](https://img-blog.csdnimg.cn/direct/8b0c173e29da4b5e85f10f0c87f68892.png)