在强化学习中,环境(Environment)、模型(Model)和策略(Policy)是三个核心概念,它们之间的关系可以描述如下:
环境(Environment):
- 环境是智能体所面对的外部世界,它包含了智能体所处的状态空间和动作空间,以及智能体与环境之间的交互规则。
- 环境定义了智能体可能遇到的状态,智能体采取的动作以及由此产生的奖励信号。
- 在强化学习任务中,环境负责接收智能体的动作,并根据当前状态返回相应的奖励信号和下一个状态。
模型(Model):
- 模型是对环境的内部表示,它描述了环境的动态特性,包括状态转移函数和奖励函数。
- 在基于模型的强化学习中,智能体利用模型来预测环境的动态特性,即给定状态和动作,模型可以预测下一个状态和相应的奖励。
- 模型可以是环境的精确描述,也可以是对环境的近似估计。
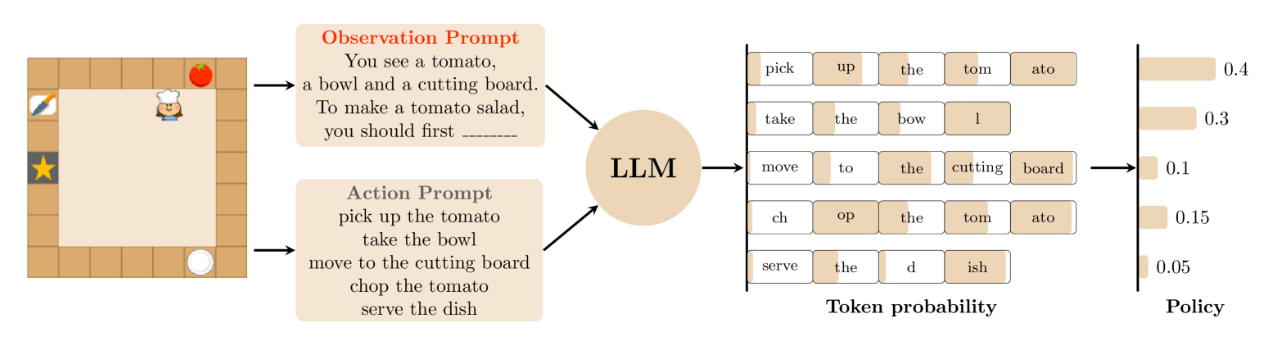
策略(Policy):
- 策略是智能体在给定状态下选择动作的规则或概率分布。它决定了智能体在不同情况下应该采取什么样的行为。
- 策略可以是确定性的,即在每个状态下选择一个确定的动作,也可以是随机的,即在每个状态下选择一个动作的概率分布。
- 目标是通过学习和优化策略来使得智能体能够获得最大的长期累积奖励。
关系:
- 环境是智能体与外部世界的接口,负责模拟智能体的行为所产生的效果,并向智能体提供奖励信号。
- 模型是对环境的内部表示,它描述了环境的动态特性,智能体可以利用模型来预测环境的反应。
- 策略是智能体在给定状态下选择动作的规则,智能体根据策略来决定每个状态下采取的动作。
在强化学习中,智能体通过与环境的交互来学习最优策略,通过优化策略来最大化长期累积奖励。智能体可以基于环境的模型进行规划,也可以直接与真实环境进行交互学习策略。
下面是一个简单的示例代码,展示了强化学习中环境、模型和策略的基本实现:
# 强化学习环境示例代码
class Environment:
def __init__(self):
self.state_space = [0, 1, 2, 3] # 状态空间
self.action_space = [0, 1, 2] # 动作空间
def step(self, action):
next_state = self.state_space[action] # 根据动作确定下一个状态
reward = 1 if next_state == 3 else 0 # 根据状态确定奖励,到达状态3时获得奖励1
done = (next_state == 3) # 如果到达状态3,任务结束
return next_state, reward, done
def reset(self):
return self.state_space[0] # 重置环境,返回初始状态
# 强化学习模型示例代码(简单的环境模拟)
class Model:
def __init__(self):
pass
def predict(self, state, action):
next_state = (state + action) % 4 # 简单的环境模拟,下一个状态为当前状态加上动作
reward = 1 if next_state == 3 else 0 # 奖励与环境一致
return next_state, reward
# 强化学习策略示例代码(随机策略)
class RandomPolicy:
def __init__(self, action_space):
self.action_space = action_space
def choose_action(self, state):
return np.random.choice(self.action_space) # 在动作空间中随机选择一个动作
# 在一个简单环境中执行随机策略
env = Environment()
policy = RandomPolicy(env.action_space)
total_reward = 0
state = env.reset()
for _ in range(10): # 进行10步
action = policy.choose_action(state)
next_state, reward, done = env.step(action)
total_reward += reward
state = next_state
if done:
break
print("Total Reward:", total_reward)
这个示例代码中,Environment表示一个简单的环境,包含状态空间和动作空间,并定义了step方法用于执行动作并返回下一个状态、奖励和是否终止。Model是一个简单的模型,用于预测下一个状态和奖励,这里采用了一个简单的环境模拟方式。RandomPolicy是一个随机策略,用于在给定状态下随机选择动作。最后,代码演示了在环境中执行随机策略并计算累积奖励的过程。






















![[Meachines][Medium]WifineticTwo](https://img-blog.csdnimg.cn/img_convert/1c520a60e5613840b0fd02cddb31826e.jpeg)