1. rqt_console
#启动
ros2 run rqt_console rqt_console
日志级别:Fatal --> Error --> Warn --> Info --> Debug
#修改允许发布的日志级别
ros2 run <package_name> <executable_name> --ros-args --log-level WARN
2. launch文件
ROS2中的launch文件其实是一个python的脚本。
内容:引用需要的模块 --> 描述节点的启动:功能包、命名空间(不可重复)、可执行文件名、节点名
#启动
ros2 launch .py
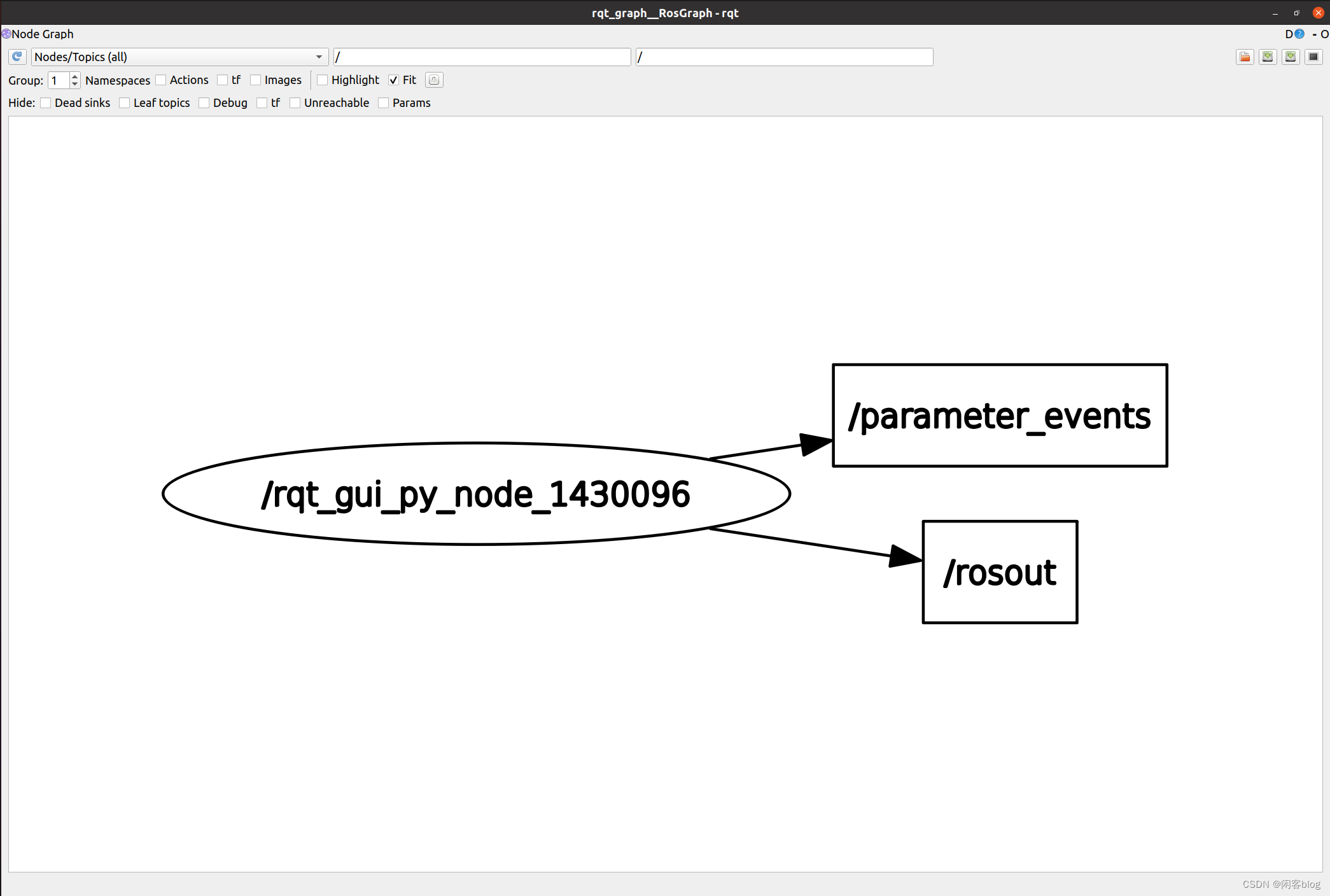
3. rqt_graph
看到更明确的节点关系
4. ros2 bag
#录制话题数据
ros2 bag record <topic_name>
#查看数据库文件信息
ros2 bag info <bag_file_name>
#回放数据
ros2 bag play <bag_file_name>



























![[Linux初阶]常见的指令](https://img-blog.csdnimg.cn/direct/3c5347466ce4439bbcdf1f621fcf6d81.png)
