PyTorch:3-基础实战
注:所有资料来源且归属于thorough-pytorch(https://datawhalechina.github.io/thorough-pytorch/),下文仅为学习记录
3.1:ResNet基本介绍
退化现象(degradation):增加网络层数的过程中,随着训练准确率逐渐饱和,继续增加层数,训练准确率出现下降的现象。且这种下降不是过拟合。
快捷连接(shortcut connection):将输入直接连接到后面的层,一定程度缓解了梯度消失和梯度爆炸,消除深度过大导致神经网络训练困难的问题。
梯度消失和梯度爆炸的根源:DNN结构,和,反向传播算法
梯度爆炸:网络层之间的梯度(值大于 1.0)重复相乘导致的指数级增长
梯度消失:网络层之间的梯度(值小于 1.0)重复相乘导致的指数级变小
3.2:torchvision的源代码
卷积核封装
封装3x3和1x1卷积核
def conv3x3(in_planes: int, out_planes: int, stride: int = 1, groups: int = 1, dilation: int = 1) -> nn.Conv2d:
"""3x3 convolution with padding"""
return nn.Conv2d(
in_planes, # 输入通道数
out_planes, # 输出通道数
kernel_size=3, # 卷积核尺寸
stride=stride, # 步长
padding=dilation, # 填充
groups=groups, # 分组
bias=False, # 偏移量
dilation=dilation, # 空洞卷积的中间间隔
)
def conv1x1(in_planes: int, out_planes: int, stride: int = 1) -> nn.Conv2d:
"""1x1 convolution"""
return nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=stride, bias=False)
# 解释同上
基本模块设计
ResNet常见的大小有ResNet-18,ResNet-34,ResNet-50、ResNet-101和ResNet-152,其中网络后面的数字代表的是网络的层数。
两个基本模块:BasicBlock和BottleNeck
两个block类输入一个通道为in_planes维的度特征图,输出一个planes*block.expansion维的特征图,其中planes的数目大小等于in_planes。
支路上的downsample操作:对shortcut支路进行大小或维度上的调整。
shortcut connection
【1】同等维度的映射:输入输出直接相加
F ( x ) + x F(x)+x F(x)+x
【2】不同维度的映射:给x补充一个线性映射来匹配维度(通常是1x1卷积)
basic block
BasicBlock模块用来构建resnet18和resnet34
class BasicBlock(nn.Module):
expansion: int = 1
def __init__(
self,
inplanes: int,
planes: int,
stride: int = 1,
downsample: Optional[nn.Module] = None,
groups: int = 1,
base_width: int = 64,
dilation: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None,
) -> None:
super().__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError("BasicBlock only supports groups=1 and base_width=64")
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x: Tensor) -> Tensor:
identity = x # 备份
out = self.conv1(x) # 对x做卷积
out = self.bn1(out) # 对x归一化
out = self.relu(out) # 对x用激活函数
out = self.conv2(out) # 对x做卷积
out = self.bn2(out) # 归一化
if self.downsample is not None:
identity = self.downsample(x)
out += identity # 进行downsample
out = self.relu(out)
return out
bottle neck
BottleNeck模块用来构建resnet50,resnet101和resnet152
class Bottleneck(nn.Module):
expansion: int = 4 # 对输出通道进行倍增
def __init__(
self,
inplanes: int,
planes: int,
stride: int = 1,
downsample: Optional[nn.Module] = None,
groups: int = 1,
base_width: int = 64,
dilation: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None,
) -> None:
super().__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.0)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
# Bottleneckd forward函数和BasicBlock类似
def forward(self, x: Tensor) -> Tensor:
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
网络整体结构
class ResNet(nn.Module):
def __init__(
self,
block: Type[Union[BasicBlock, Bottleneck]], # 选择基本模块
layers: List[int], # 每一层block的数目构成 -> [3,4,6,3]
num_classes: int = 1000, # 分类数目
zero_init_residual: bool = False, # 初始化
#######其他卷积构成,与本文ResNet无关######
groups: int = 1,
width_per_group: int = 64,
replace_stride_with_dilation: Optional[List[bool]] = None,
#########################################
norm_layer: Optional[Callable[..., nn.Module]] = None, # norm层
) -> None:
super().__init__()
_log_api_usage_once(self)
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.inplanes = 64 # 输入通道
#######其他卷积构成,与本文ResNet无关######
self.dilation = 1 # 空洞卷积
if replace_stride_with_dilation is None:
# each element in the tuple indicates if we should replace
# the 2x2 stride with a dilated convolution instead
replace_stride_with_dilation = [False, False, False]
if len(replace_stride_with_dilation) != 3:
raise ValueError(
"replace_stride_with_dilation should be None "
f"or a 3-element tuple, got {replace_stride_with_dilation}"
)
self.groups = groups
self.base_width = width_per_group
#########################################
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
# 通过_make_layer带到层次化设计的效果
self.layer1 = self._make_layer(block, 64, layers[0]) # 对应着conv2_x
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, dilate=replace_stride_with_dilation[0]) # 对应着conv3_x
self.layer3 = self._make_layer(block, 256, layers[2], stride=2, dilate=replace_stride_with_dilation[1]) # 对应着conv4_x
self.layer4 = self._make_layer(block, 512, layers[3], stride=2, dilate=replace_stride_with_dilation[2]) # 对应着conv5_x
# 分类头
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
# 模型初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu")
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck) and m.bn3.weight is not None:
nn.init.constant_(m.bn3.weight, 0) # type: ignore[arg-type]
elif isinstance(m, BasicBlock) and m.bn2.weight is not None:
nn.init.constant_(m.bn2.weight, 0) # type: ignore[arg-type]
# 层次化设计
def _make_layer(
self,
block: Type[Union[BasicBlock, Bottleneck]], # 基本构成模块选择
planes: int, # 输入的通道
blocks: int, # 模块数目
stride: int = 1, # 步长
dilate: bool = False, # 空洞卷积,与本文无关
) -> nn.Sequential:
norm_layer = self._norm_layer
downsample = None # 是否采用下采样
####################无关#####################
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
#############################################
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
norm_layer(planes * block.expansion),
)
# 使用layers存储每个layer
layers = []
layers.append(
block(
self.inplanes, planes, stride, downsample, self.groups, self.base_width, previous_dilation, norm_layer
)
)
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(
block(
self.inplanes,
planes,
groups=self.groups,
base_width=self.base_width,
dilation=self.dilation,
norm_layer=norm_layer,
)
)
# 将layers通过nn.Sequential转化为网络
return nn.Sequential(*layers)
def _forward_impl(self, x: Tensor) -> Tensor:
# See note [TorchScript super()]
x = self.conv1(x) # conv1 x shape [1 64 112 112]
x = self.bn1(x) # 归一化处理
x = self.relu(x) # 激活函数
x = self.maxpool(x) # conv2_x的3x3 maxpool, x shape [1 64 56 56]
x = self.layer1(x) # layer 1
x = self.layer2(x) # layer 2
x = self.layer3(x) # layer 3
x = self.layer4(x) # layer 4
x = self.avgpool(x) # 自适应池化
x = torch.flatten(x, 1)
x = self.fc(x) # 分类
return x
def forward(self, x: Tensor) -> Tensor:
return self._forward_impl(x)
模型步骤
【1】首先是一个7 x 7的卷积作用在输入的3维图片上,并输入一个64维的特征图(即self.inplanes的初始值),通过BatchNorm层,ReLU层,MaxPool层。
【2】然后经过_make_layer()函数构建的4层layer。
【3】最后经过一个AveragePooling层,再经过一个fc层得到分类输出。
【4】在网络搭建起来后,还对模型的参数(Conv2d、BatchNorm2d、last BN)进行了初始化。
一个_make_layer()构建一个layer层,每一个layer层是两种基本模块的堆叠。
输入参数中block代表该layer堆叠模块的类型,可选BasicBlock或者BottleNeck。blocks代表该layer中堆叠的block的数目;planes与该layer最终输出的维度数有关,注意最终输出的维度数为planes * block.expansion。
变体
【1】Wider ResNet。
【2】DarkNet53。只是使用到了残差连接从而复用特征。
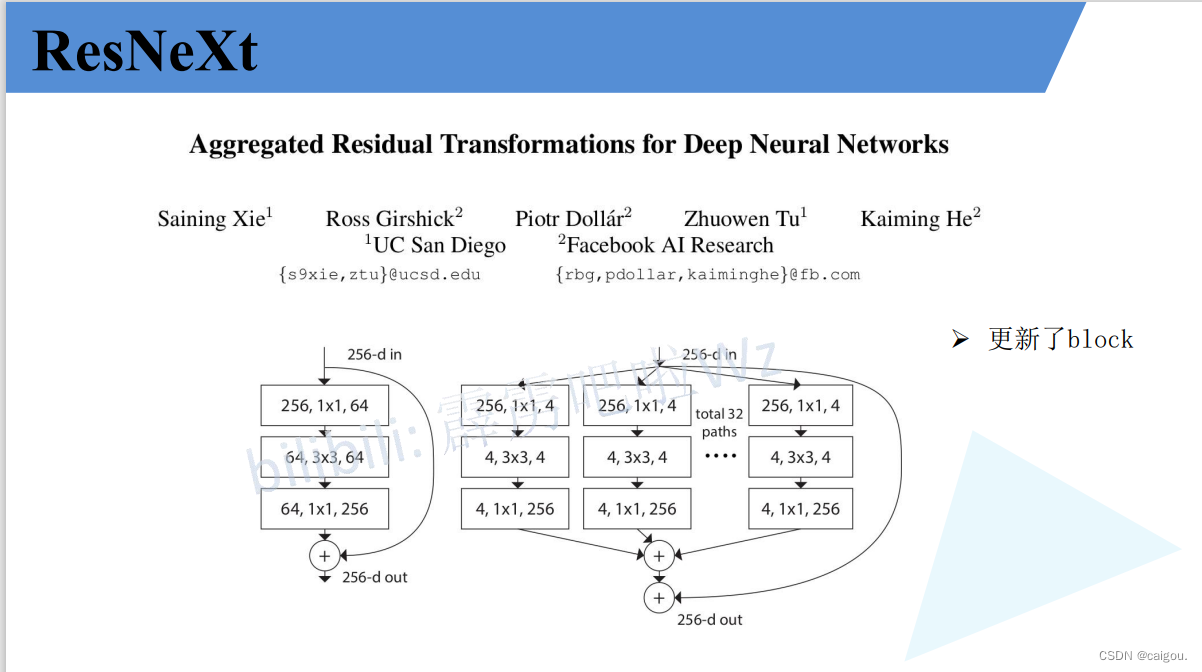
【3】ResNeXt。提出了一种介于普通卷积核深度可分离卷积的这种策略:分组卷积。通过控制分组的数量(基数)来达到两种策略的平衡。分组卷积的思想源自Inception,ResNeXt的每个分支的拓扑结构是相同的。
3.3:模型保存
【1】确定保存路径
【2】调用save函数
save_path = "./FahionModel.pkl"
torch.save(model, save_path)