19-228、基于51单片机智能扫地吸尘小车红外避障机器人风扇吸尘设计+蓝牙控制设计
产品功能描述:
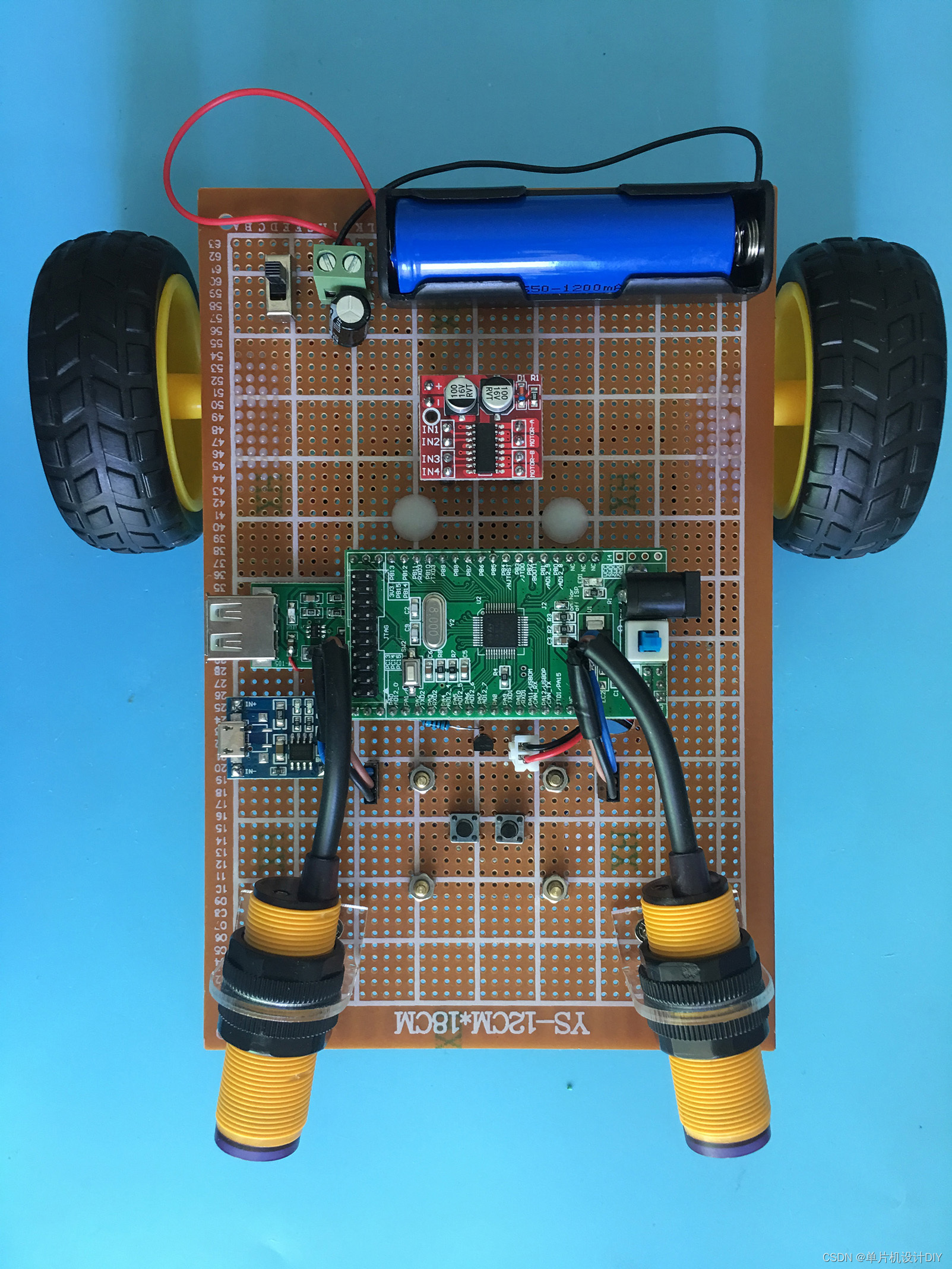
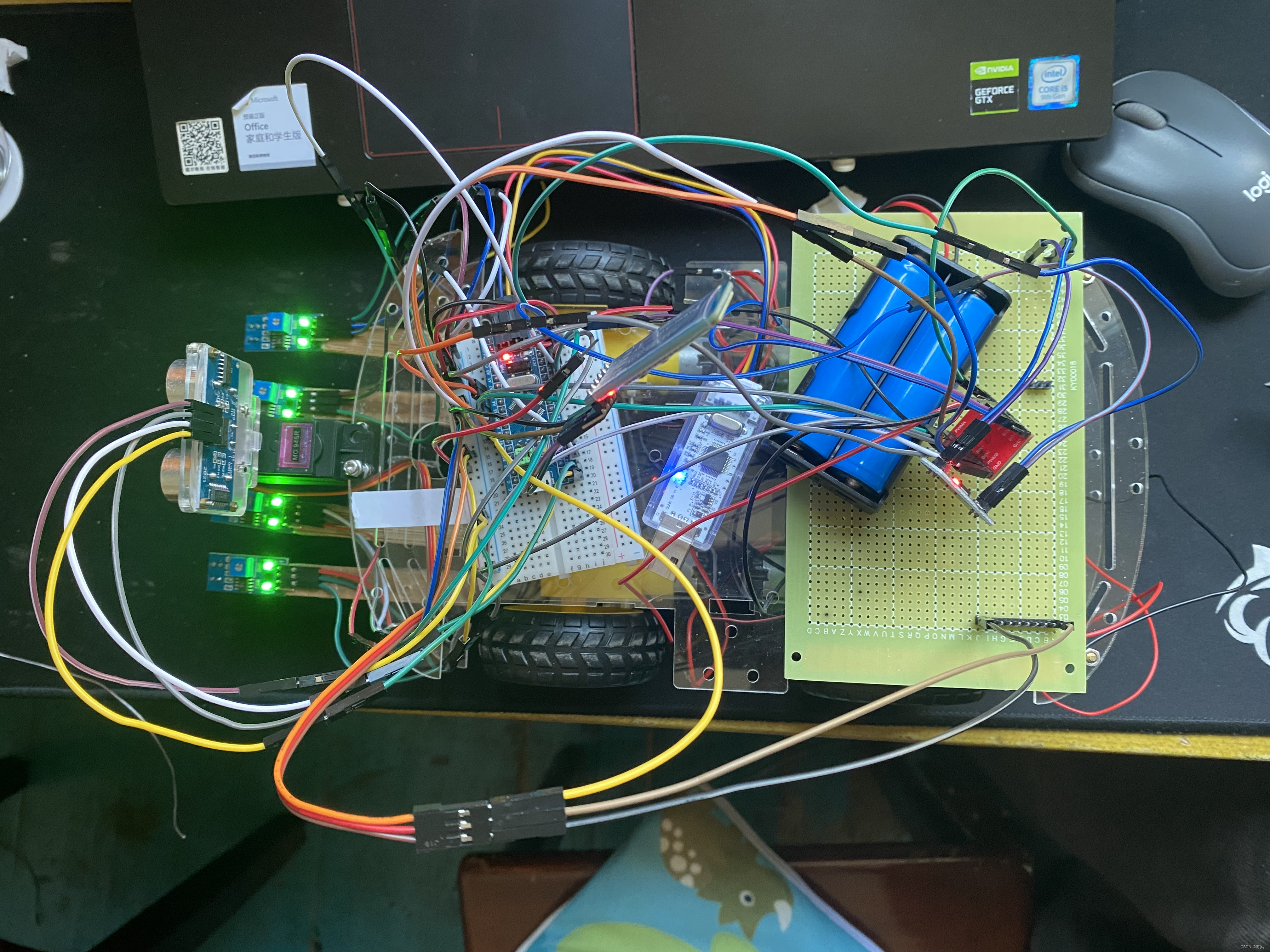
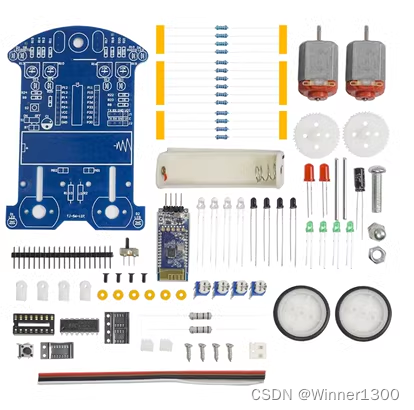
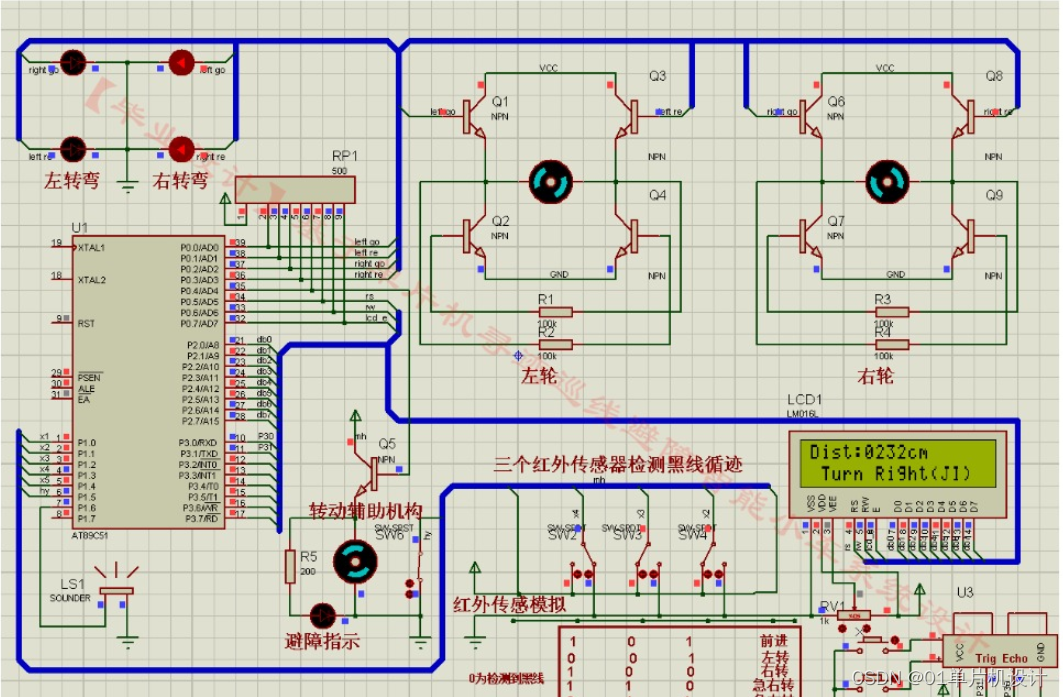
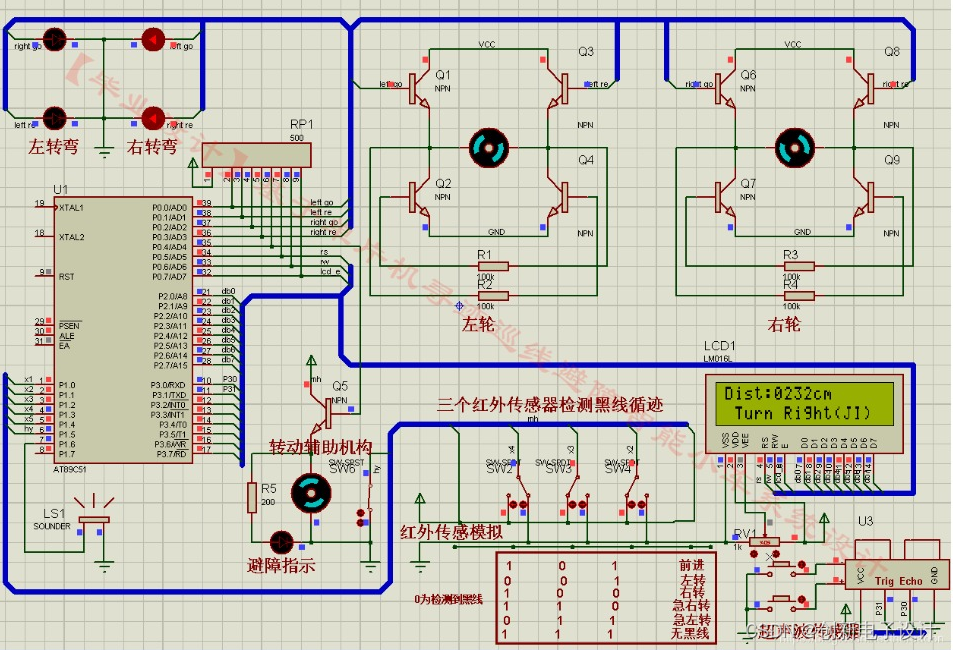
本设计由STC89C52单片机电路+2路红外避障模块电路+2路按键电路+风扇驱动底单了+L298N电机驱动电路+蓝牙模块+电池盒电路组成。
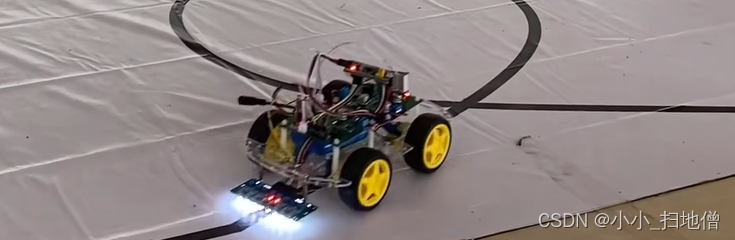
1、按下启动按键后,小车左侧的红外避障传感器模块检测到有障碍物,则智能车右拐;小车右侧的红外避障传感器模块检测到有障碍物,则智能车左拐,同时,风扇转动吸尘;
2、按下停止按键后,小车停止转动,同时,风扇停止转动。
3、通过手机蓝牙APP可以发送指令控制小车的方向以及停止(小车接收指令后只是左拐2秒或者右拐2秒,左拐或者右拐后原有红外避障功能不变。小车停止后除非按下启动按键,小车才会启动)