提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
提示:这里可以添加本文要记录的大概内容:
一个人的精神支柱就是自信,而这份自信则来源于持续的成就感。要获得成就感,就必须不断求新求变,勇于创造。
前面发布了机器人的学习目标,经过了很长时间了,没有看到实验室里有谁去做,刚好在垃圾堆里捡到一包元件,拿出来一看竟然是一辆初级焊接板小车的材料,没什么好说的,干它。
目的: 作为一个开始吧,希望通过制作更多的人能够从中受益。并制作更优秀的作品。
锻炼:
- 1.认识元件、焊接
- 2.看原理图,调试小车步骤
- 3.上电测试步骤
- 4.提高:自己画板,升级小车
- 5.编程:自己编程更新代码
提示:以下是本篇文章正文内容,下面案例可供参考
一、准备工作?
- 1.烙铁
- 2.焊锡
- 3.螺丝刀
- 4.松香
- 5.引脚钳子
- 6.万用表
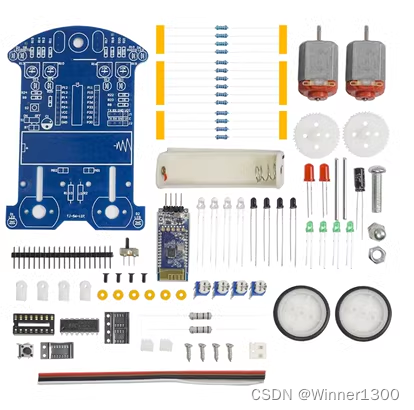
二、看看包装里的材料
D2-6小车 淘宝看了一下,散件也就30块,相对功能来说很不错了。练习焊接、练习测试,最好是自己跟着原理图画一遍电路板熟悉整个电路设计的过程。
这东西没什么难度,焊接好基本能用。
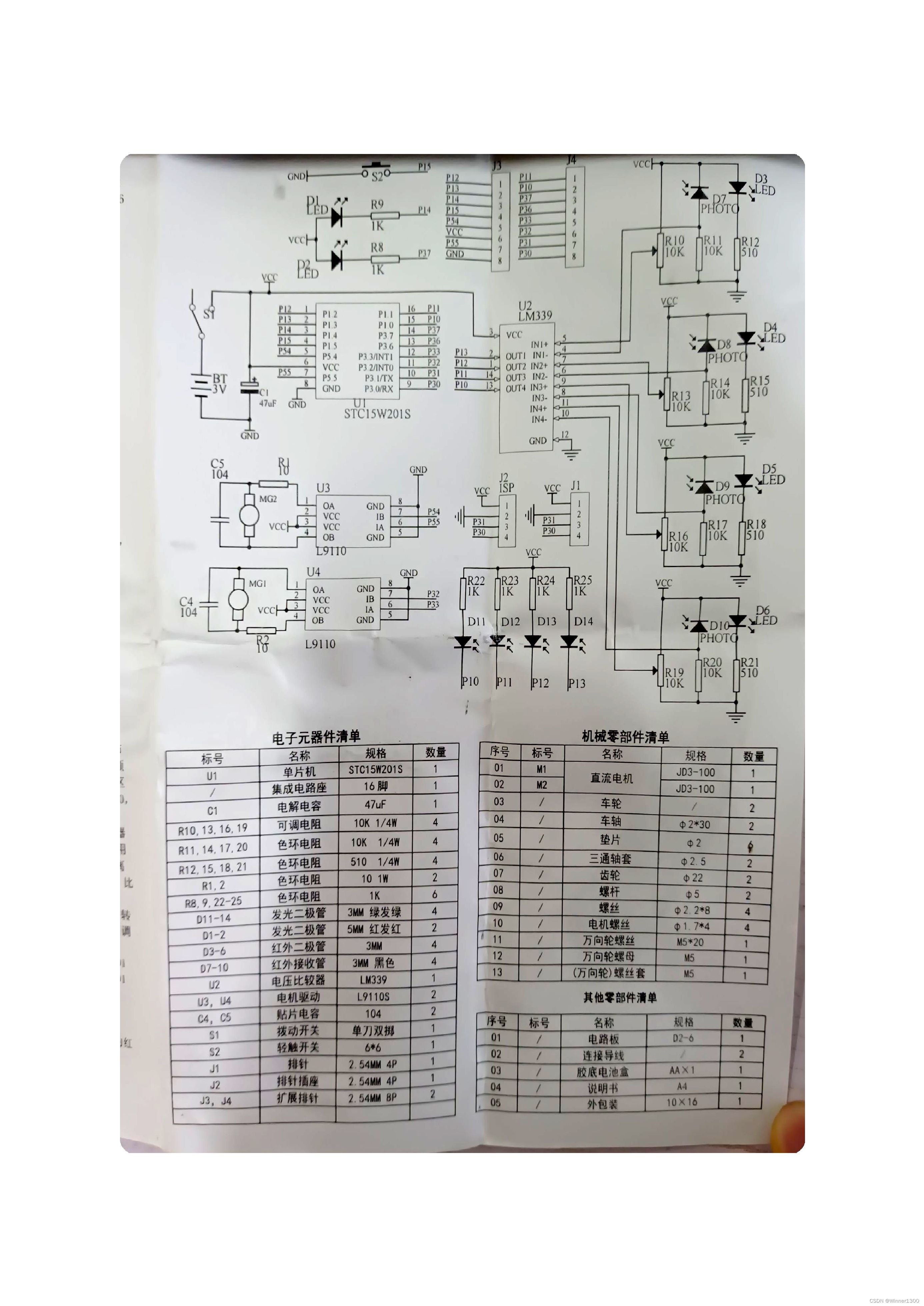
2.1元件清单:
2.2原理说明
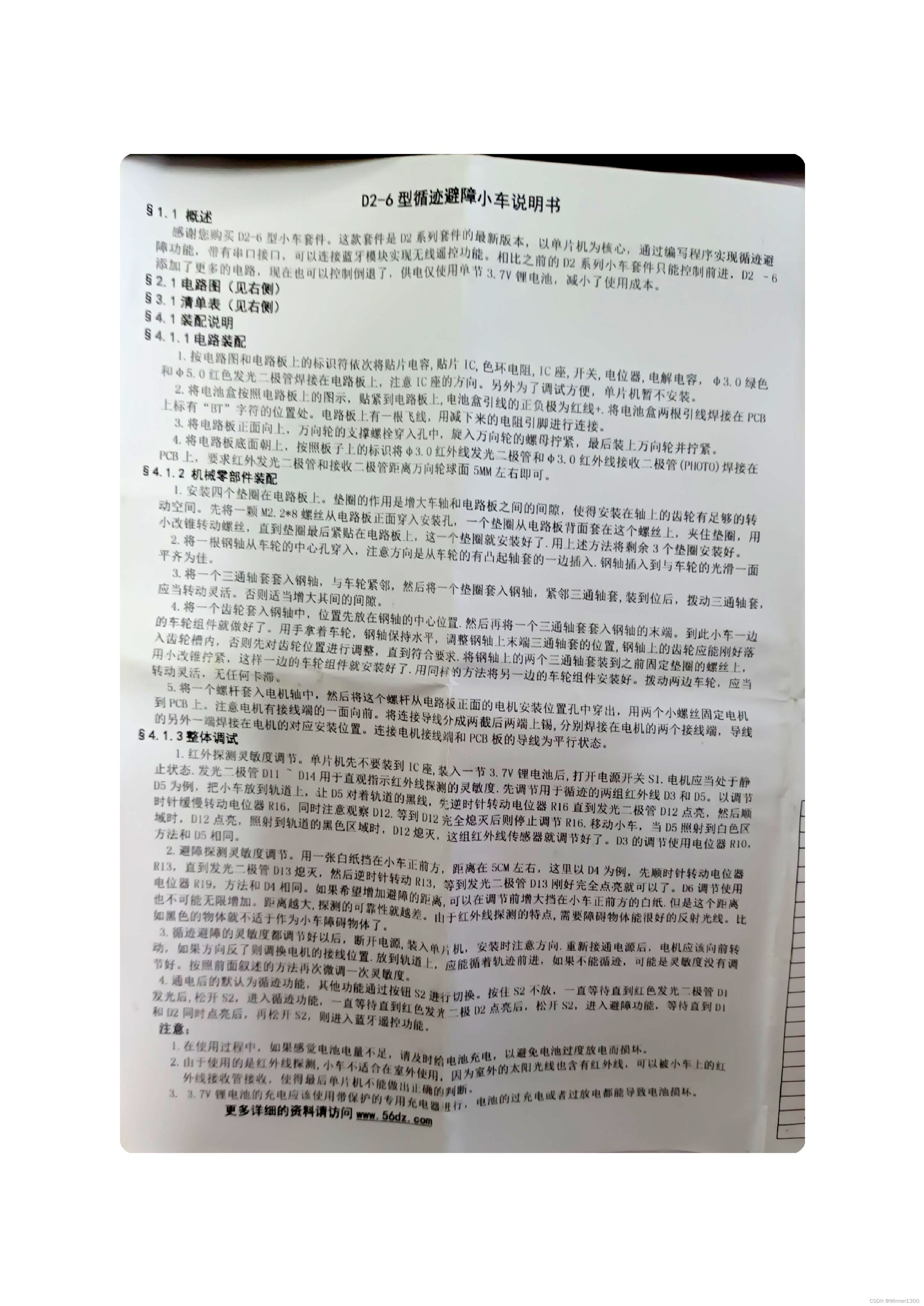
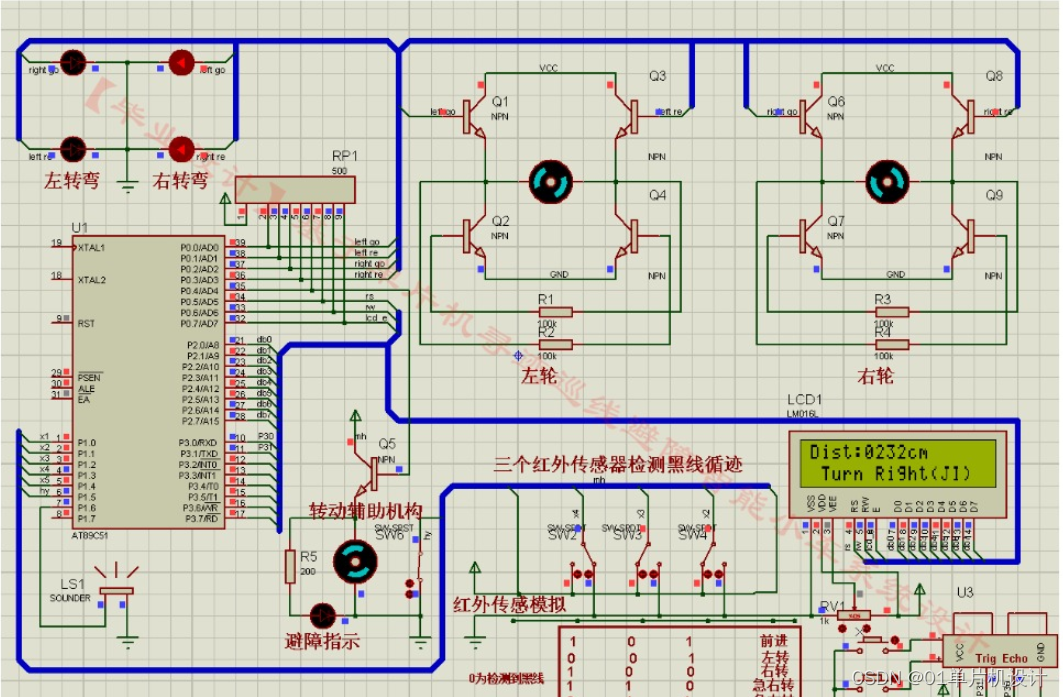
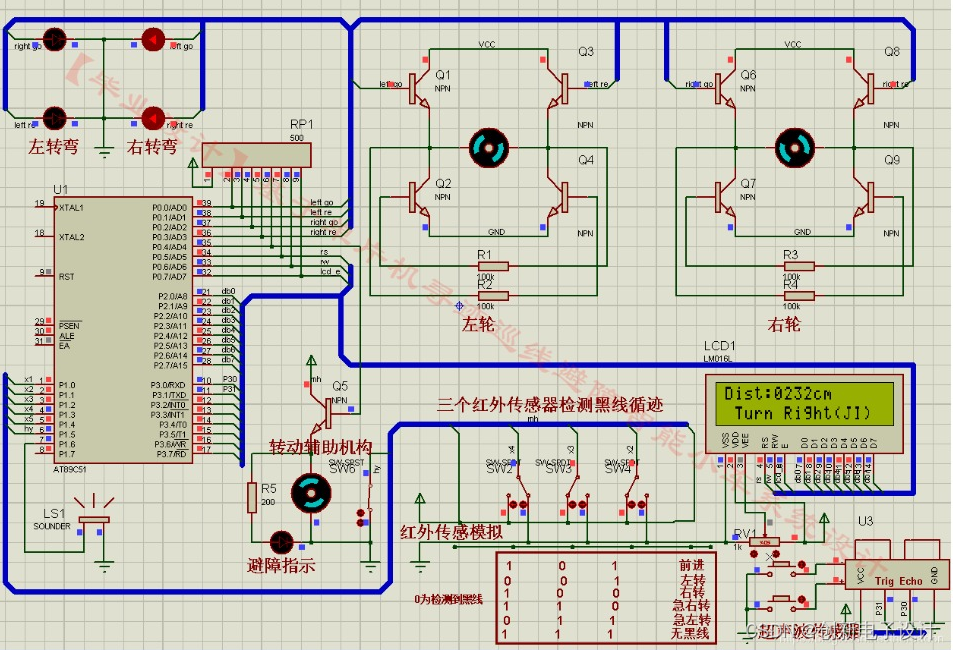
2.3原理图
-
- 339做电压比较器
-
- L9110直流电机驱动器
-
- STC15W201S 国产单片机,识别高低电平,驱动电机正反转
三、焊接
3.1 先焊接贴片

3.2 先低后高将直插元件焊接好
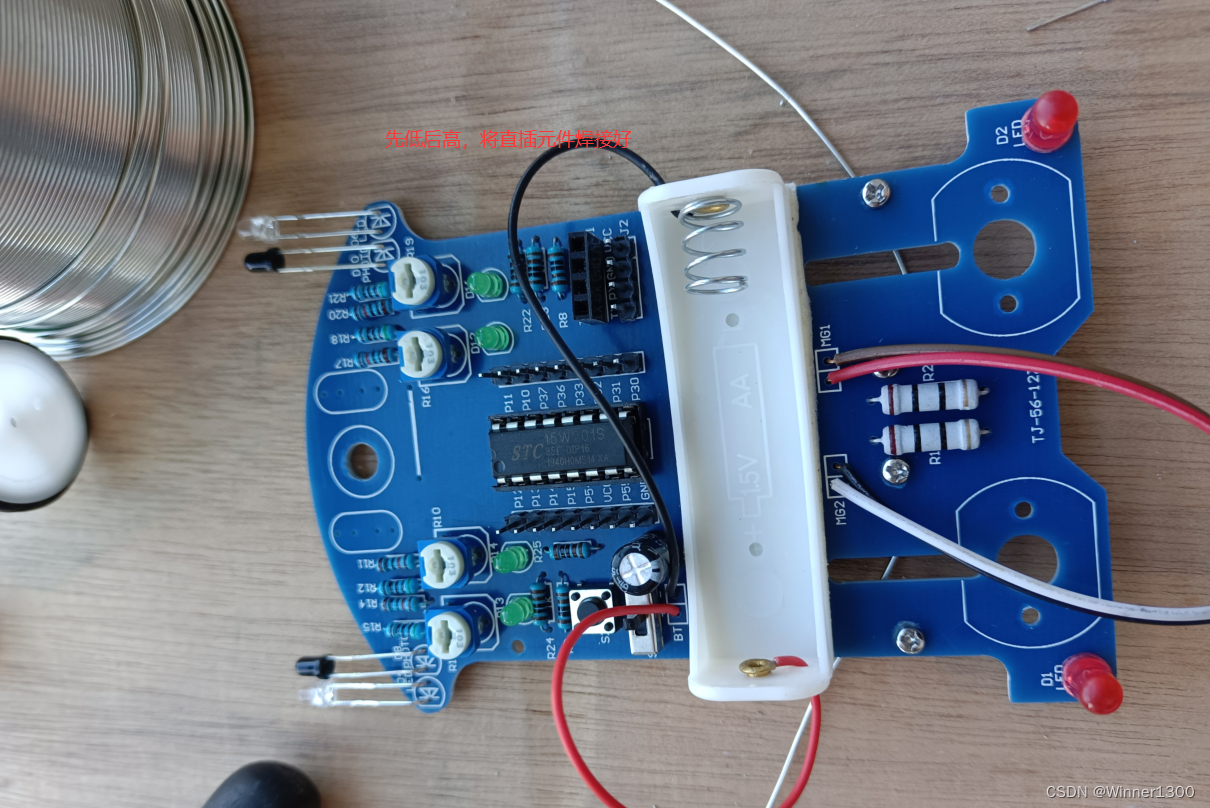
3.3 注意发射管(白管)和接收管(黑管)的 阳级和阴级
发射管 :引脚长为阳,反之为阴
接收管:引脚长为阴,反之为阳
3.4 最后安装马达
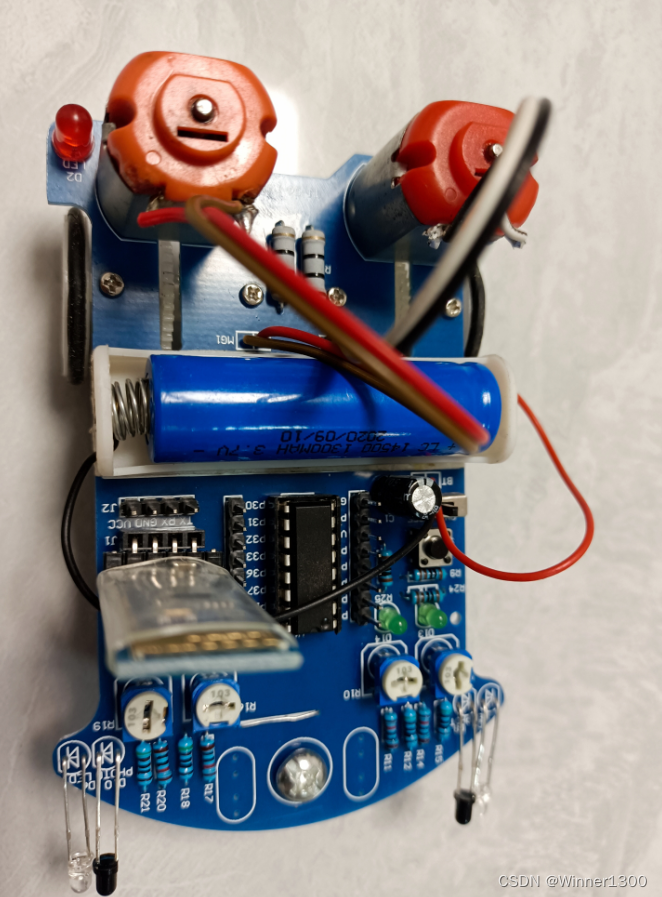
3.4 安装轮子
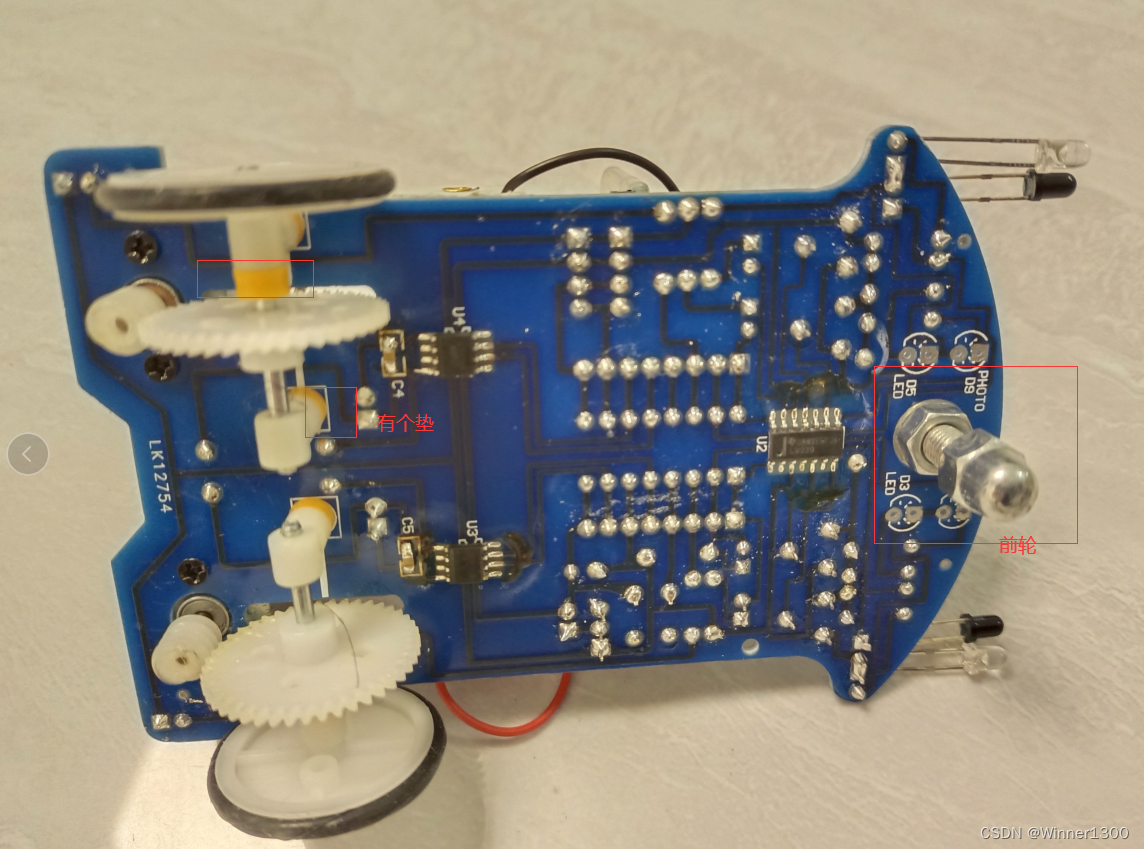
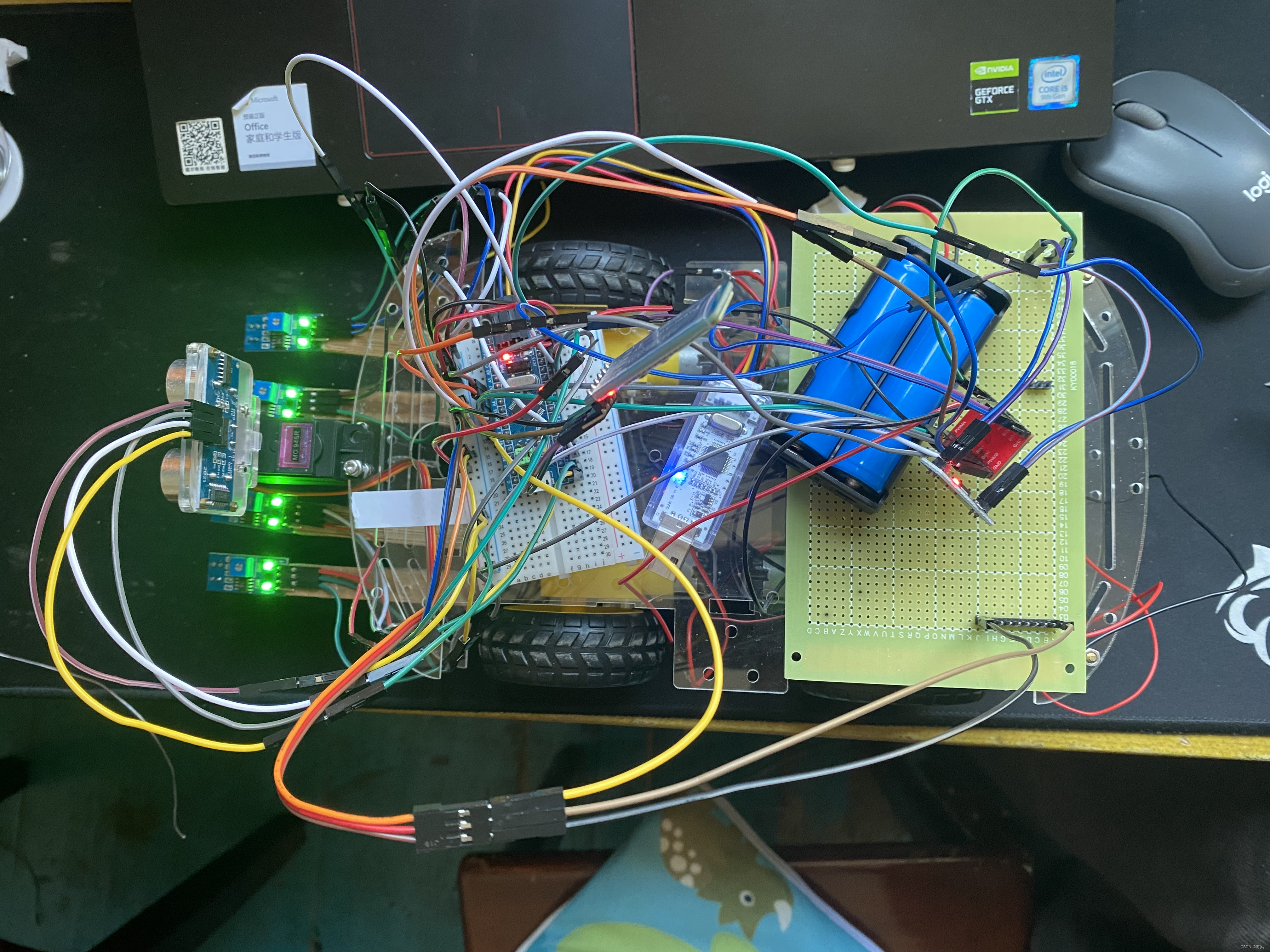
四、上电测试
4.1 上电前先用万用表测试看是否短路
4.2 上电后测试电压是否正常
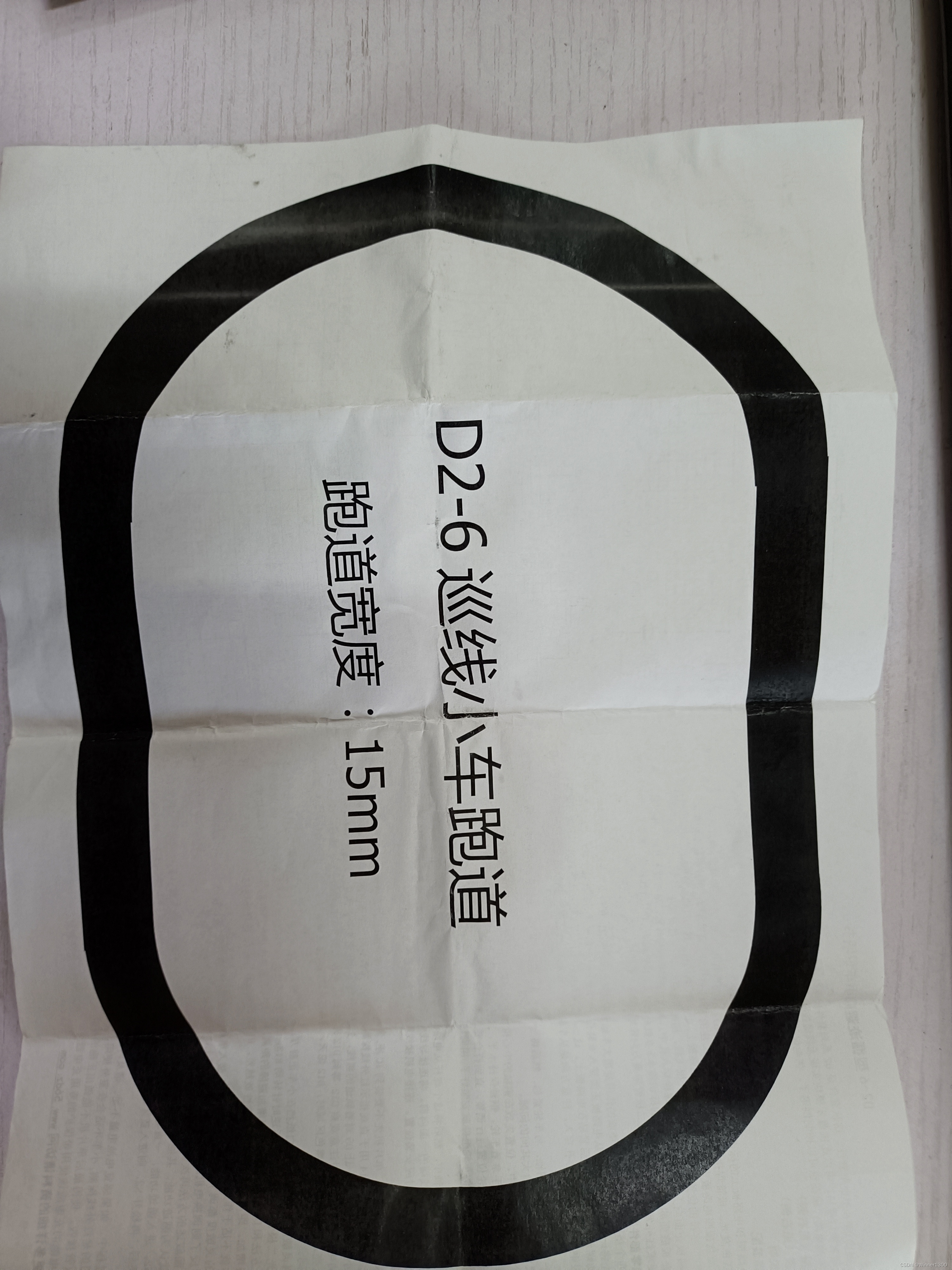
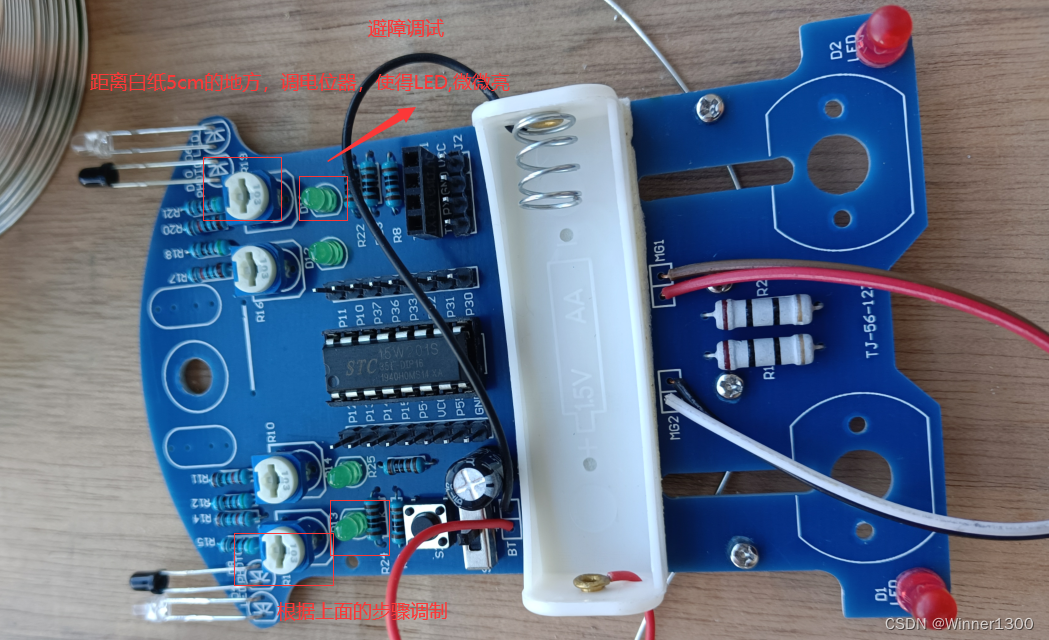
4.3 由于切换模式
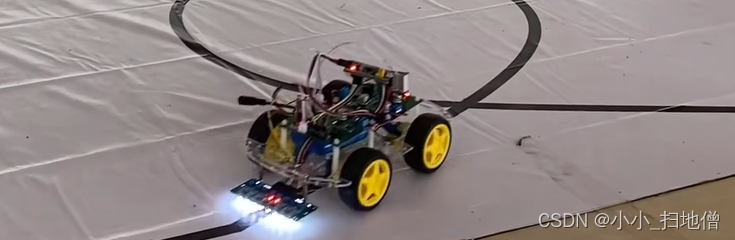
由于少了寻迹接收管,所以只能切换为寻迹模式做测试。寻迹模式主要调节。
注意:
-
- 调整电位器的时候要慢
-
- 电机如果正反转不对,调换一下电机线就行
上电切换到避障模式,一切正常。就是有个电机是后面找的,转速不一样,启动带动不了起步。
总结
焊接、测试了一部散装小车,适合大一大二的新手锻炼。如果你大三大四了还找不到方向又想从零开始,不妨动手试试,找找成就感吧。
一个人的精神支柱就是自信,而这份自信则来源于持续的成就感。要获得成就感,就必须不断求新求变,勇于创造。



















![[C++] : 贪心算法专题(第一部分)](https://img-blog.csdnimg.cn/direct/a1639943aabc46c9b00cafdc8f3bf0f9.png)