摸鱼记录 Day_17 (((^-^)))
review
前边已经学习了:
数码管显示原理:数码管动态扫描显示-CSDN博客
且挖了个SPI的坑坑
1. 今日份摸鱼任务
2. 循环移位寄存器

|
四位D触发器,输入信号1001,经过四次时钟上升沿,D0-D3 1001 DATA是串行数据,在此结构下,每个上升沿到来,都会改变D0-D3的输出 为了正确输出四位的串转并数据 
可在红色箭头处,添加一个使能信号,对输出进行控制 |
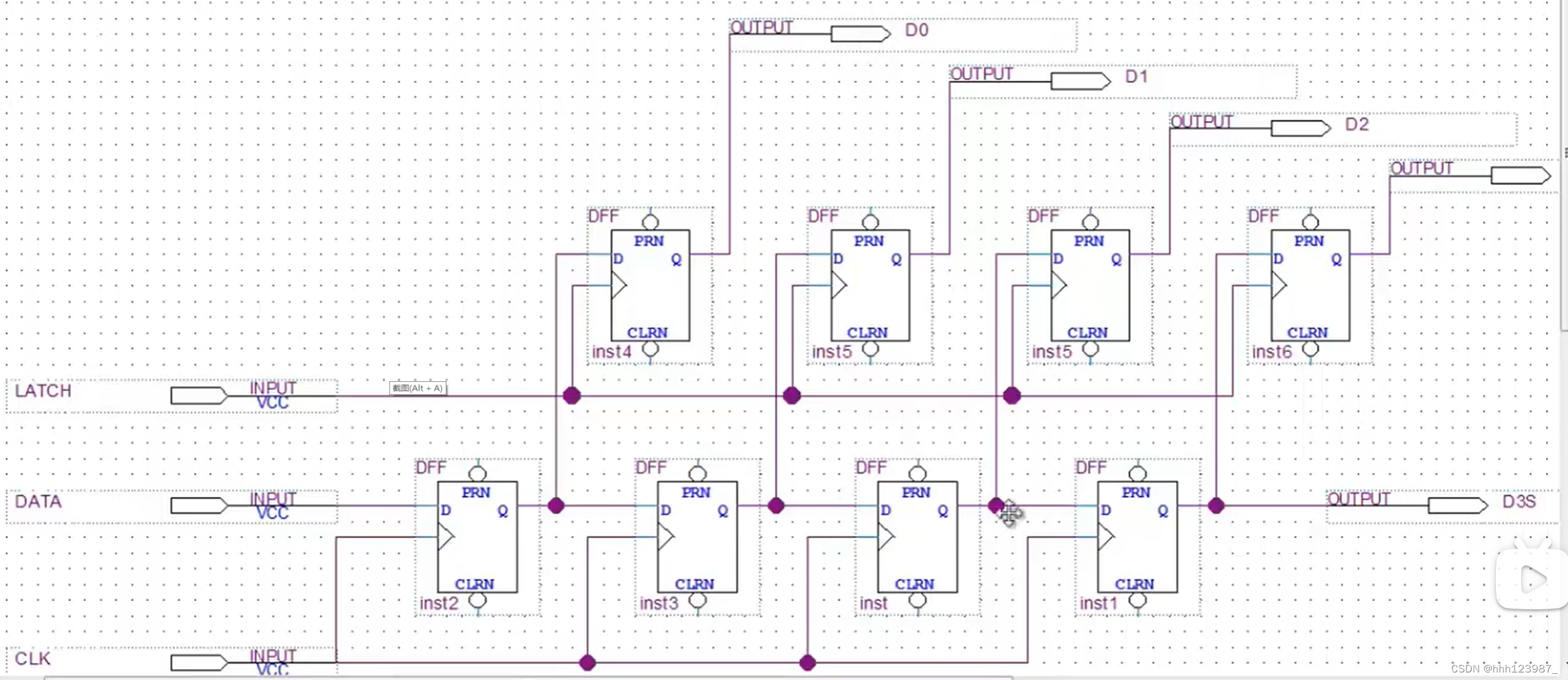
|
| 此时,使用CLK、DATA、LATCH三根信号线,即可完成将串行信号转为并行信号 |
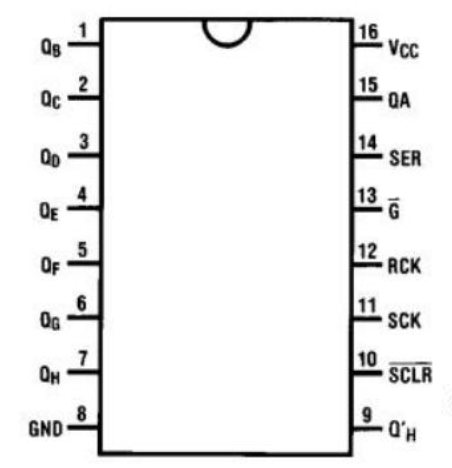
3. 74HC959 循环移位寄存器
一文搞懂74HC595芯片(附使用方法)_74hc595芯片引脚图及功能-CSDN博客
74HC595的最重要的功能就是:串行输入,并行输出。
其次,74HC595里面有2个8位寄存器:移位寄存器、存储寄存器。

| 第一个从SER送入的bit将会从 Q7 出去 |
本篇在草稿呆了很多天,因为上图SHCP STCP的画法有一定理解上的问题 SHCP 移位寄存器的时钟输出 STCP 存储寄存器的时钟输出 但是在例程中: STCP是在数据都保存后,完成一次输出,这保证了输出数据是一个完整的 |
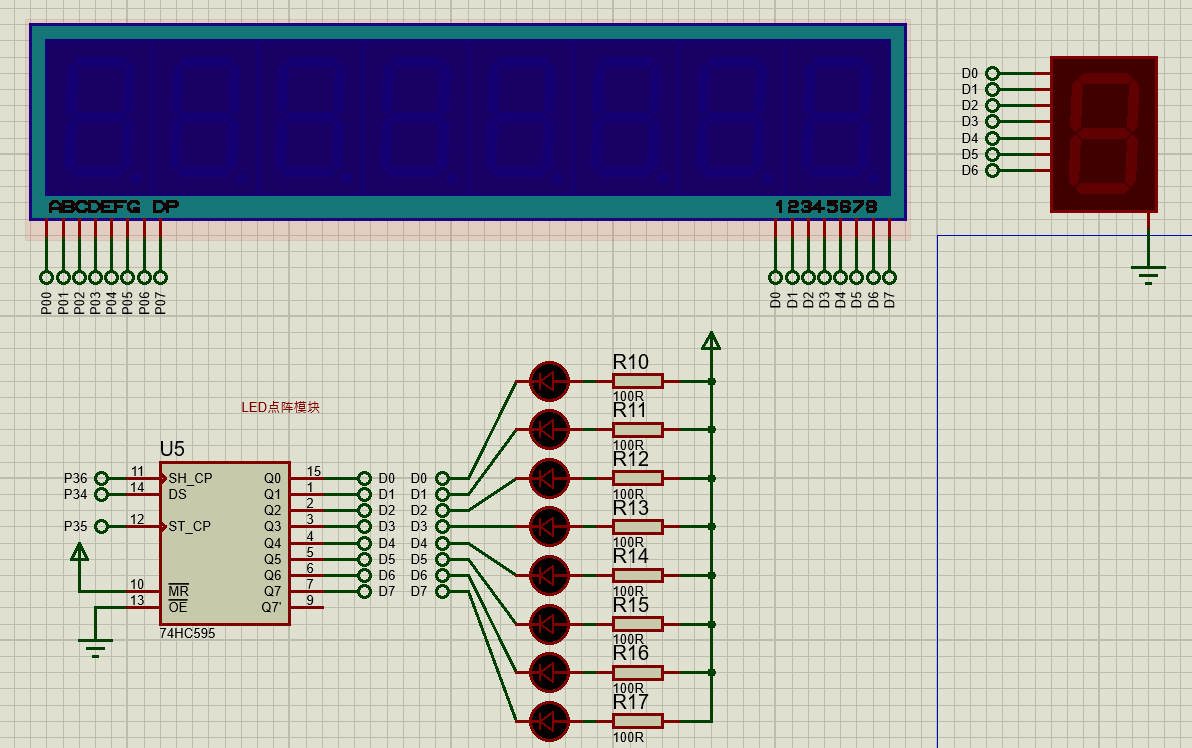
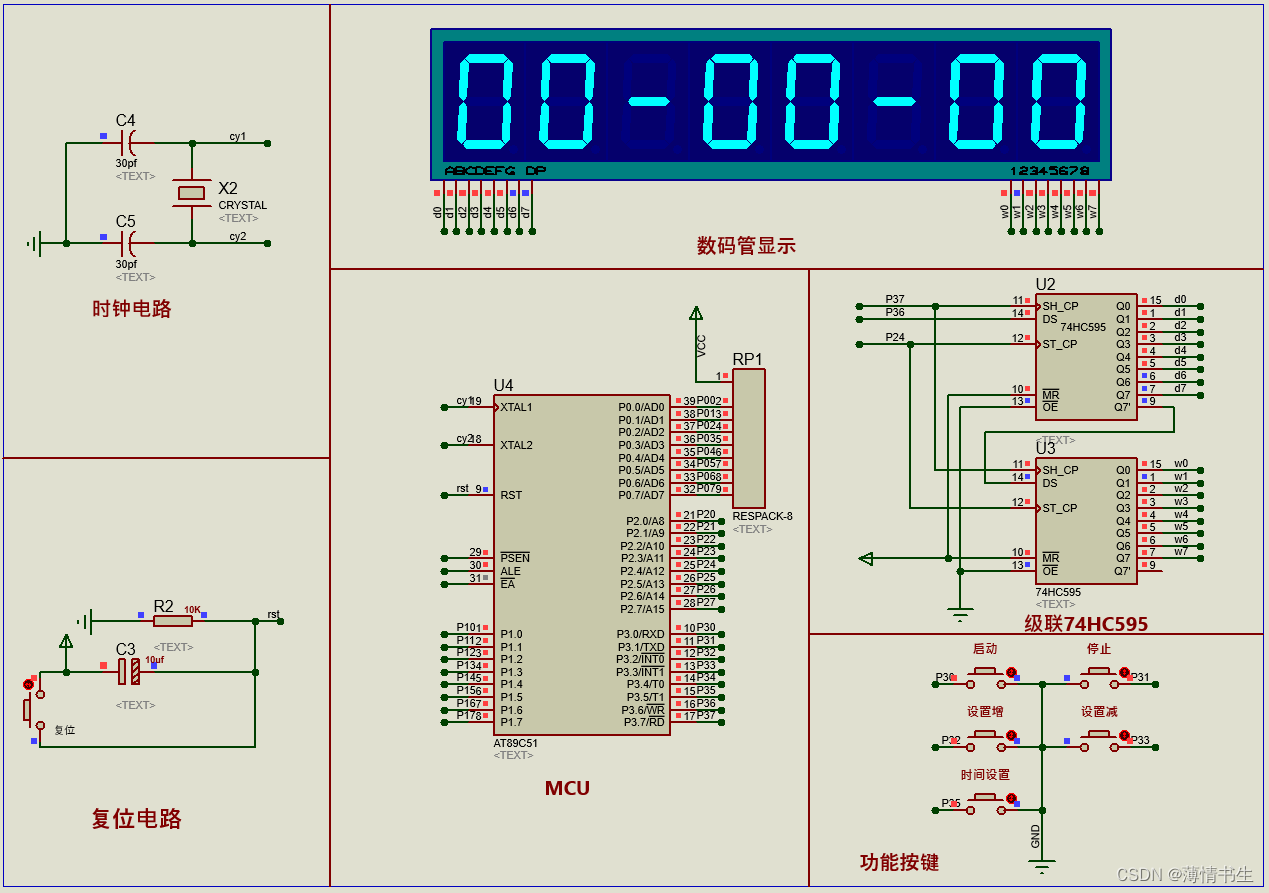
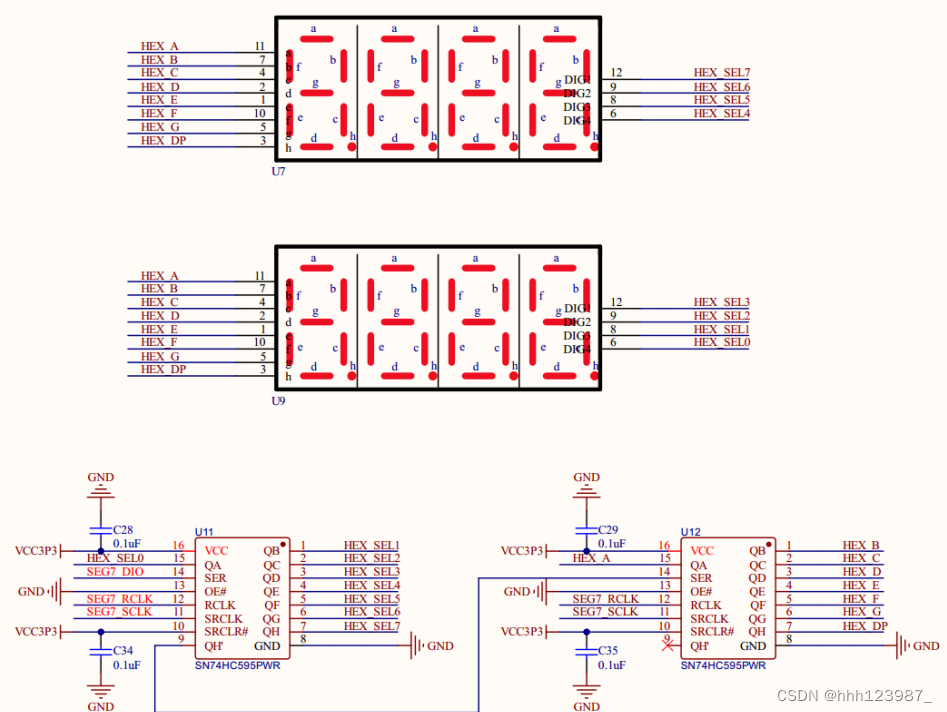
ACZ702 配套 EDA 扩展板设计用到了芯片 74HC595,该芯片的作用是移位寄存器,通过移位的方式,节省 FPGA 的管脚。FPGA 只需要输出 3 个管脚,即可达到发送数码管数据的目的,与数码管动态扫描显示-CSDN博客的传统段选位选方式相比节省了 IO 设计资源。
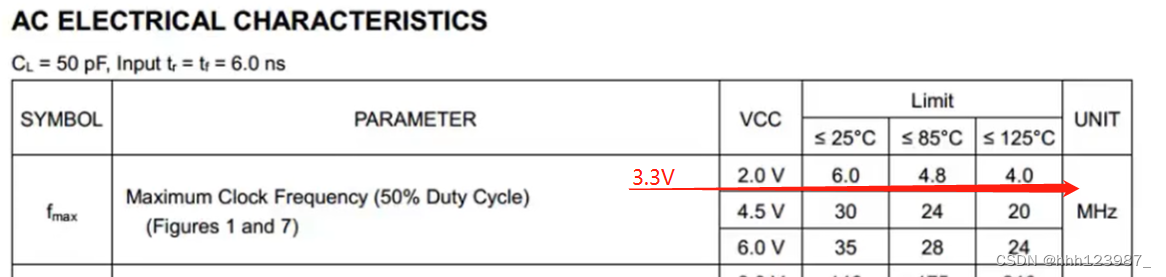
3.3V供电情况下,50MHz -----》25MHz-----》12.5MHz
4. VIO Virtual Input/Output
关于这个IP核可以看:Vivado中VIO IP核的使用_vivado vio-CSDN博客
本次实验,用于设定数码管的显示内容,具体设置如下:
4. SPI接口的74HC595驱动数码管实现 (((^-^)))
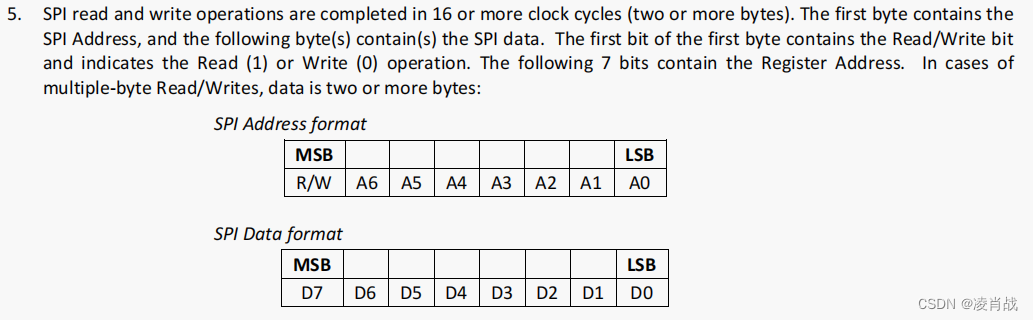
SPI(Serial Peripheral Interface),串行外围设备接口。
SPI是一个同步的数据总线,用单独的数据线和一个单独的时钟信号来保证发送端和接收端的同步。
可以参考:SPI协议详解(图文并茂+超详细) - 知乎 (zhihu.com)

对于74HC595,本次SPI协议,是学习SCK MOSI,无需MISO,片选默认选中

4.1 design sources
hex_8 
|
module hex_8(input clk,
input reset_n,
input [31:0]disp_data, //8个数码管进行显示,每个显示0~F,输入格式为disp_data = 32'h12345678
output reg [7:0]sel,
output reg [7:0]seg
); //[31:0]disp_data 16hex 4*8
//[7:0]sel 位选信号
//[7:0]seg 段选信号 // 1kHz分频时钟
reg [14:0]div_clk;
always@(posedge clk or negedge reset_n)
if(!reset_n)
div_clk <= 1'b0;
else if(div_clk == 24999)
div_clk <= 1'b0;
else
div_clk <= div_clk + 1'b1;
reg disp_en;
always@(posedge clk or negedge reset_n)
if(!reset_n)
disp_en <= 1'b0;
else if(div_clk == 24999)
disp_en <= 1'b1;
else
disp_en <= 1'b0; // 位选sel
reg[2:0]sel_num;
always@(posedge clk or negedge reset_n)
if(!reset_n)
sel_num <= 3'b000;
else if(disp_en)
sel_num <= sel_num + 1'b1;
always@(posedge clk or negedge reset_n)
if(!reset_n)
sel <= 8'b0000_0000;
else case(sel_num)
0:sel <= 8'b0000_0001;
1:sel <= 8'b0000_0010;
2:sel <= 8'b0000_0100;
3:sel <= 8'b0000_1000;
4:sel <= 8'b0001_0000;
5:sel <= 8'b0010_0000;
6:sel <= 8'b0100_0000;
7:sel <= 8'b1000_0000;
endcase
// 段选seg [31:0]disp_data 16hex 4*8
reg [3:0] dis_tmp;
always@(posedge clk )
case(sel_num) //高位放前面
0:dis_tmp <= disp_data[31:28];
1:dis_tmp <= disp_data[27:24];
2:dis_tmp <= disp_data[23:20];
3:dis_tmp <= disp_data[19:16];
4:dis_tmp <= disp_data[15:12];
5:dis_tmp <= disp_data[11:8];
6:dis_tmp <= disp_data[7:4];
7:dis_tmp <= disp_data[3:0];
endcase
always@(posedge clk )
case(dis_tmp)
0:seg <= 8'hc0;
1:seg <= 8'hf9;
2:seg <= 8'ha4;
3:seg <= 8'hb0;
4:seg <= 8'h99;
5:seg <= 8'h92;
6:seg <= 8'h82;
7:seg <= 8'hf8;
8:seg <= 8'h80;
9:seg <= 8'h90;
4'ha:seg <= 8'h88;
4'hb:seg <= 8'h83;
4'hc:seg <= 8'hc6;
4'hd:seg <= 8'ha1;
4'he:seg <= 8'h86;
4'hf:seg <= 8'h8e;
endcase endmodule |
hc595_driver //在Verilog中,不能使用数字开头命名 
|
module hc595_driver(
input clk,
input reset_n,
input [15:0]data,
input s_en,
output reg sh_cp,
output reg st_cp,
output reg ds
); /启动信号s_en时,保存当前data reg [15:0]r_data;
always@(posedge clk)
if(s_en)
r_data <= data;
parameter CNT_MAX = 2;
// 在 3.3V 状态下工作于 12.5MHz
reg [7:0]divider_cnt;//分频计数器
always@(posedge clk or negedge reset_n)
if(!reset_n)
divider_cnt <= 0;
else if(divider_cnt == CNT_MAX - 1'b1)
divider_cnt <= 0;
else
divider_cnt <= divider_cnt + 1'b1;
wire sck_plus;
assign sck_plus = (divider_cnt == CNT_MAX - 1'b1);
reg [5:0]SHCP_EDGE_CNT;
always@(posedge clk or negedge reset_n)
if(!reset_n)
SHCP_EDGE_CNT <= 0;
else if(sck_plus)
begin
if(SHCP_EDGE_CNT == 6'd32) //32 16个数据,按照SH_CP上升沿、下降沿
SHCP_EDGE_CNT <= 0;
else
SHCP_EDGE_CNT <= SHCP_EDGE_CNT + 1'b1;
end
else
SHCP_EDGE_CNT <= SHCP_EDGE_CNT;
always@(posedge clk or negedge reset_n)
if(!reset_n)
begin
st_cp <= 1'b0;
ds <= 1'b0;
sh_cp <= 1'd0;
end
else begin
case(SHCP_EDGE_CNT)//重点就是线性序列机这部分分析啦 //SH_CP 移位寄存器的时钟 //在SH_CP上升沿 0->1 输出数据 //在SH_CP下降沿 1->0 改变数据
0: begin sh_cp <= 0; st_cp <= 1'd0;ds <= r_data[15];end
1: begin sh_cp <= 1; st_cp <= 1'd0;end
2: begin sh_cp <= 0; ds <= r_data[14];end
3: begin sh_cp <= 1; end
4: begin sh_cp <= 0; ds <= r_data[13];end
5: begin sh_cp <= 1; end
6: begin sh_cp <= 0; ds <= r_data[12];end
7: begin sh_cp <= 1; end
8: begin sh_cp <= 0; ds <= r_data[11];end
9: begin sh_cp <= 1; end
10: begin sh_cp <= 0; ds <= r_data[10];end
11: begin sh_cp <= 1; end
12: begin sh_cp <= 0; ds <= r_data[9];end
13: begin sh_cp <= 1; end
14: begin sh_cp <= 0; ds <= r_data[8];end
15: begin sh_cp <= 1; end
16: begin sh_cp <= 0; ds <= r_data[7];end
17: begin sh_cp <= 1; end
18: begin sh_cp <= 0; ds <= r_data[6];end
19: begin sh_cp <= 1; end
20: begin sh_cp <= 0; ds <= r_data[5];end
21: begin sh_cp <= 1; end
22: begin sh_cp <= 0; ds <= r_data[4];end
23: begin sh_cp <= 1; end
24: begin sh_cp <= 0; ds <= r_data[3];end
25: begin sh_cp <= 1; end
26: begin sh_cp <= 0; ds <= r_data[2];end
27: begin sh_cp <= 1; end
28: begin sh_cp <= 0; ds <= r_data[1];end
29: begin sh_cp <= 1; end
30: begin sh_cp <= 0; ds <= r_data[0];end
31: begin sh_cp <= 1; end
32: st_cp <= 1'd1;//最后拉高一下st_cp锁存器输出
default:
begin
st_cp <= 1'b0;
ds <= 1'b0;
sh_cp <= 1'd0;
end
endcase
end endmodule |
| hex_top |
module hex_top(
clk,
reset_n,
sh_cp,
st_cp,
ds
); input clk; //50M
input reset_n;
output sh_cp;
output st_cp;
output ds;
wire [31:0]disp_data;
wire [7:0] sel;//数码管位选(选择当前要显示的数码管)
wire [7:0] seg;//数码管段选(当前要显示的内容)
vio_0 vio_0 (
.clk(clk),
.probe_out0(disp_data)
);
hc595_driver hc595_driver(
.clk(clk),
.reset_n(reset_n),
.data({seg,sel}), //将段选与位选信号拼接在一起
.s_en(1'b1),
.sh_cp(sh_cp),
.st_cp(st_cp),
.ds(ds)
);
hex8 hex8(
.clk(clk),
.reset_n(reset_n),
.en(1'b1),
.disp_data(disp_data),
.sel(sel),
.seg(seg)
);
endmodule |
4.2 板级验证
//好啦, (((^-^)))