最近在研读ROS中的A*算法,参见了文章
:【ROS-Navigation】—— Astar路径规划算法解析
这里作为笔记:
问题1:如何理解如下代码?
float QuadraticCalculator::calculatePotential(float* potential, unsigned char cost, int n, float prev_potential) {
// get neighbors
float u, d, l, r;
l = potential[n - 1];
r = potential[n + 1];
u = potential[n - nx_];
d = potential[n + nx_];
// ROS_INFO("[Update] c: %f l: %f r: %f u: %f d: %f\n",
// potential[n], l, r, u, d);
// ROS_INFO("[Update] cost: %d\n", costs[n]);
// find lowest, and its lowest neighbor
float ta, tc;
if (l < r)
tc = l;
else
tc = r;
if (u < d)
ta = u;
else
ta = d;
float hf = cost; // traversability factor
float dc = tc - ta; // relative cost between ta,tc
if (dc < 0) // tc is lowest
{
dc = -dc;
ta = tc;
}
// calculate new potential
if (dc >= hf) // if too large, use ta-only update
return ta + hf;
else // two-neighbor interpolation update
{
// use quadratic approximation
// might speed this up through table lookup, but still have to
// do the divide
float d = dc / hf;
float v = -0.2301 * d * d + 0.5307 * d + 0.7040;
return ta + hf * v;
}
}
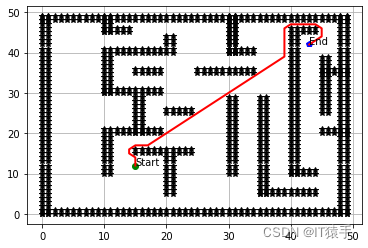
我注意到,在计算相邻点的代价值时,使用 QuadraticCalculator::calculatePotential,生成的路径比较直,而使用PotentialCalculatorr::calculatePotential::calculatePotential计算的路径比较曲折。
这个函数使用了一个基于两个邻居之间相对代价的二维插值方法来计算新的潜在值。具体的算法原理如下:
首先计算左右邻居和上下邻居的值,分别存储在l、r、u和d中。
然后比较左右邻居的值,选择较小的作为tc;比较上下邻居的值,选择较小的作为ta。
接着计算每个邻居之间的相对代价dc,即tc和ta之间的差值。如果tc更小,则将dc取反,并将ta更新为tc。
根据代价因子hf(在此算法中为cost值)与dc的比较,决定使用单一邻居更新还是两个邻居插值更新。
如果dc大于等于hf,则直接返回ta加上hf作为新的潜在值。
如果dc小于hf,则进行两个邻居的插值更新。通过二次近似来计算v值,然后返回ta加上hf乘以v作为新的潜在值。
整个算法利用了两个邻居之间的相对代价来进行潜在值的更新,根据代价因子和相对代价的大小来决定更新策略,从而有效地平衡插值和单一邻居更新的权衡。




























![[Linux_IMX6ULL驱动开发]-驱动的分层及实现](https://img-blog.csdnimg.cn/direct/d9bc7c7ff5104278935728887e0229dc.png)