四轴飞行器作为低空低成本的遥感平台,在各个领域应用广泛。与其他类型的飞行器相比,四轴飞行器硬件结构简单紧凑,但是软件算法复杂,从数据融合到姿态解算,以及最后稳定和快速的控制算法,都无疑使得四轴飞行器更加有魅力。为了实现对四轴的控制,本作品使用了ST公司推出的STM32作为处理器,STM32F4 Discovery开发板作为遥控器接收板,MPU6050作为姿态传感器,软塑料机架,空心杯电机,两对正反桨,锂电池,以及四轴遥控器。最后,经过相关调试工作,设计出能够遥控稳定飞行、具有一定的快速性和鲁棒性的小型四轴飞行器。
摘要
四轴飞行器作为低空低成本的遥感平台,在各个领域应用广泛。与其他类型的飞行器相比,四轴飞行器硬件结构简单紧凑,但是软件算法复杂,从数据融合到姿态解算,以及最后稳定和快速的控制算法,都无疑使得四轴飞行器更加有魅力。为了实现对四轴的控制,本作品使用了ST公司推出的STM32作为处理器,STM32F4 Discovery开发板作为遥控器接收板,MPU6050作为姿态传感器,软塑料机架,空心杯电机,两对正反桨,锂电池,以及四轴遥控器。最后,经过相关调试工作,设计出能够遥控稳定飞行、具有一定的快速性和鲁棒性的小型四轴飞行器。
引言
随着微电子机械系统(MEMS)的蓬勃兴起,配合高速的低功耗处理器,使得开发和研制四轴飞行器有了重大突破;特别是四轴飞行器潜在的应用前景和使用价值,都激发了人们研究它的热情。今天,四轴飞行器已经应用到各个领域,如军事打击,公安追捕,灾害搜救,农林业调查,输电线巡查,广告航拍,航模玩具等。目前广泛应用的飞行器还有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短的多,飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低。
本文主要就小型四轴飞行器,介绍一种四轴飞行器的实现方案,可以通过遥控实现四轴飞行器平稳起飞和平稳降落,控制前进后退,左侧翻右侧翻,左旋转右旋转以及悬停这一系列基本动作。四轴飞行器系统涉及空气动力学,飞行器建模分析,机械设计,MEMS惯性器件姿态检测,数据融合,导航和控制,电机驱动等领域的相关技术,是一门学科交叉的技术。结合本系统实现对四轴飞行器的控制,主要解决飞行器建模分析,MEMS器件姿态检测,数据滤波和数据融合,姿态解算的Matlab仿真,四轴平稳控制的问题,通过不断优化算法,使得四轴具有一定的抗干扰性和快速恢复平稳的功能。
系统方案
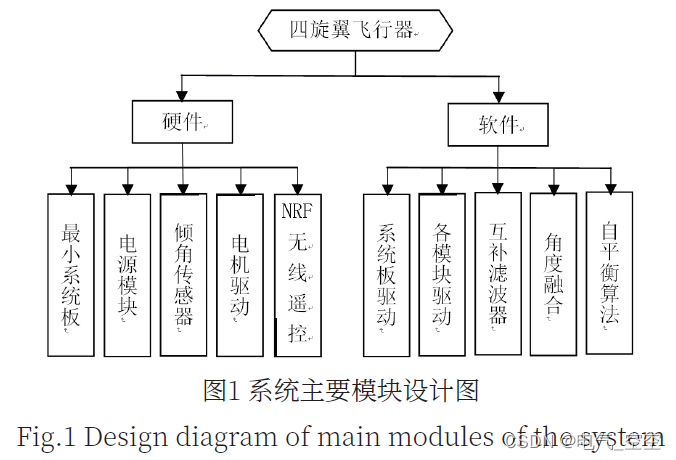
本作品设计的是小型四轴飞行器,采用一体化的设计思路,就是机身和处理器板作为一个整体,小型四轴器的处理器使用STM32F103芯片,传感器使用MPU6050,接收板使用STM32F4 Discovery开发板,使用IIC总线的方式与处理器连接;遥控板上面使用NRF24L01无线芯片,通过上位机利用自己定义的协议来完成小型四轴飞行器的姿态显示和控制;采用空心杯电机和两对正反桨,电池使用4.1V的锂电池;整个系统的电源控制部分采用662K稳压芯片,这样可以确保供电的稳定性,保证系统稳定可靠的运行。
STM32F103处理器主要负责传感器数据的获取,原始数据滤波,数据融合,四元数姿态解算算法,PID闭环控制算法和NRF24L01遥控信号的解码STM32F