1 背景
在之前的博客《自动驾驶---Motion Planning之构建SLT Driving Corridor》中,为读者讲解了SLT图构建的思路---通过构建Driving Corridor的方式确定SL两个方向的boundary。但是并没有去详细讲解如何去构造优化问题,以及如何去生成最终的轨迹,所以本篇博客将继续为读者讲解STSC后半部分的内容。
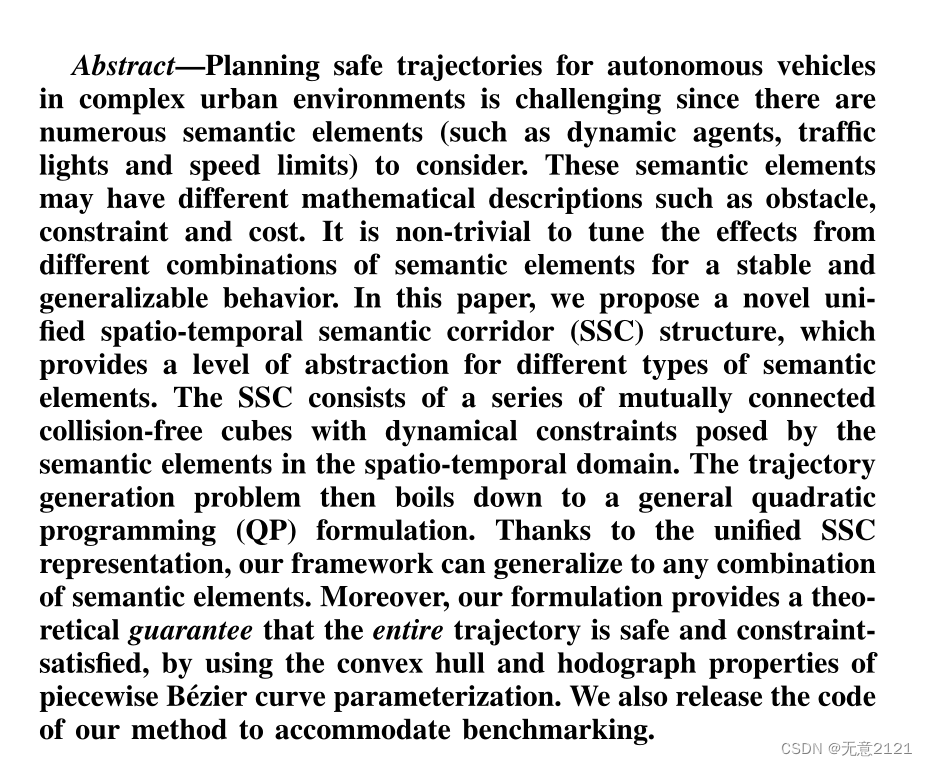
本篇博客的主要参考文献依然为《Safe Trajectory Generation for Complex Urban Environments Using Spatio-temporal Semantic Corridor》,香港科技大学大疆联合实验室为第一作者。
2 STSC轨迹规划
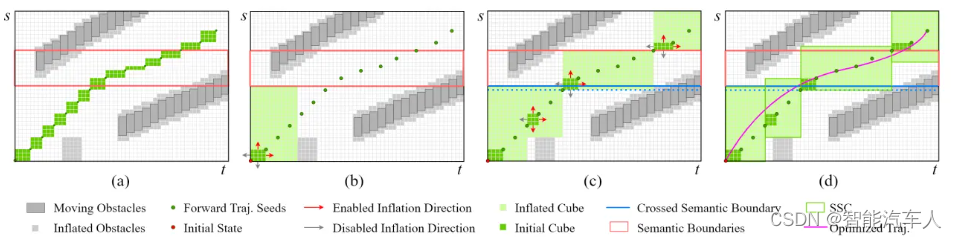
在博客 《自动驾驶---Motion Planning之构建SLT Driving Corridor》中,详细说明了Corridor的生成过程,如下图(详细内容可参考之前的博客):
2.1 基于贝塞尔曲线的轨迹规划
首先介绍Bezier曲线,Bezier曲线在路径规划中也经常用到,因此在这里简要阐述一下。贝塞尔曲线分为几种,一般2阶、3阶、4阶,或者更高阶的比较少见到,基于 的参数方程如下。
- 一阶Bezier曲线:
- 二阶Bezier曲线:
- 三阶Bezier曲线:
贝塞尔曲线具有众多特性,例如凸包性、对称性、几何不变性、仿射不变性、拟局部性,这些特性保证了生成曲线的平滑性、连续性和可控性。
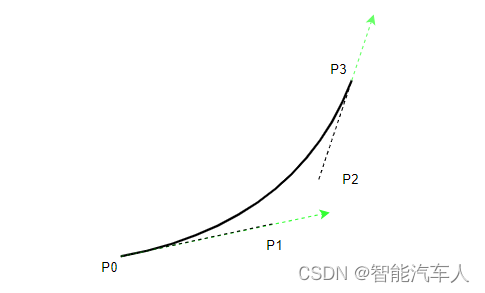
如果知道了起点 、终点
以及起终点附近的两个控制点
的坐标(即上图中的
),