1. 静态载波滤除
1. 首先对所有接收脉冲求平均得出参考接收脉冲 [Cir数据为二维数组64*n, 其中n为慢时间域采样的数据帧数]
2. 接着利用每一束接收脉冲减去参考接收脉冲就可以得到目标回波信号,参考接收脉冲的表达式为
![]()

2. RD 谱
对雷达回波做静态载波滤除后,再对信号的沿慢时间维做的FFT(目前点数为128)得到距离速度谱
快时间域采样64
雷达CIR数据如下



可以看到目标在距离维15范围内运动
3. MTI动目标
雷达动目标检测(MTI,Moving Target Indication)是雷达信号处理的一个重要环节,主要用于在静止杂波背景中检测出动目标。MTI算法通常基于多普勒效应,通过比较连续回波信号的相位或频率差异来区分动目标和静止杂波。
时域一维差分
![]()
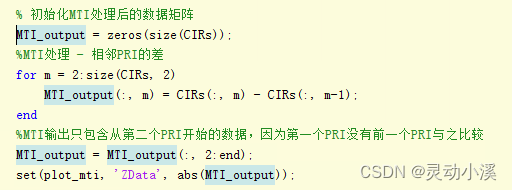
MTI 动目标图:(距离雷达30cm,靠近远离雷达10次, 距离域采样offset = 13)
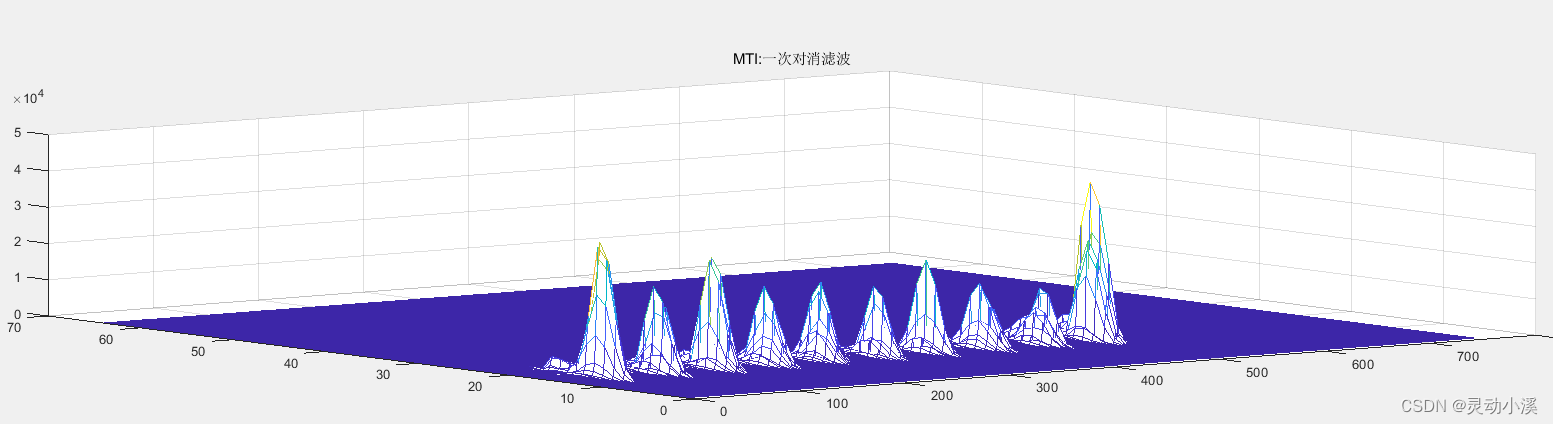
可以清晰检测出动目标
4. RT 谱
步骤1静态滤波处理后,使用mesh画RT谱
set(plot_mesh ,'ZData', abs(CIRs_cur));

对比MTI动目标图,效果类似; 对于运动目标,静态滤波(相量均值相消算法)与MTI 一维差分滤波效果类似