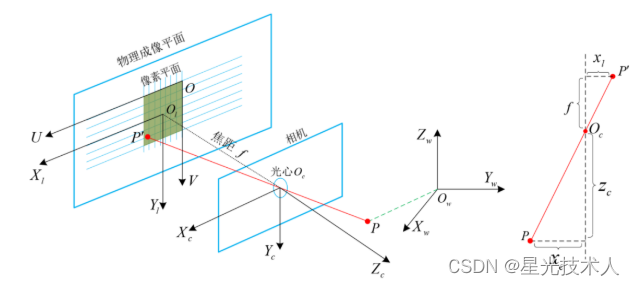
- 世界坐标系(Xw,Yw,Zw)
世界坐标系是一个用于描述和定位三维空间中物体位置的坐标系,通常反映真实世界下物体的位置和方向。它是一个惯性坐标系,被用作整个场景或系统的参考框架。在很多情况下,世界坐标系被认为是固定不变的,即它的原点和方向是相对固定的。世界坐标系的坐标值通常是绝对的,即它们与特定的测量单位和空间尺度相关联。这使得通过坐标值能够准确地表示物体的位置。
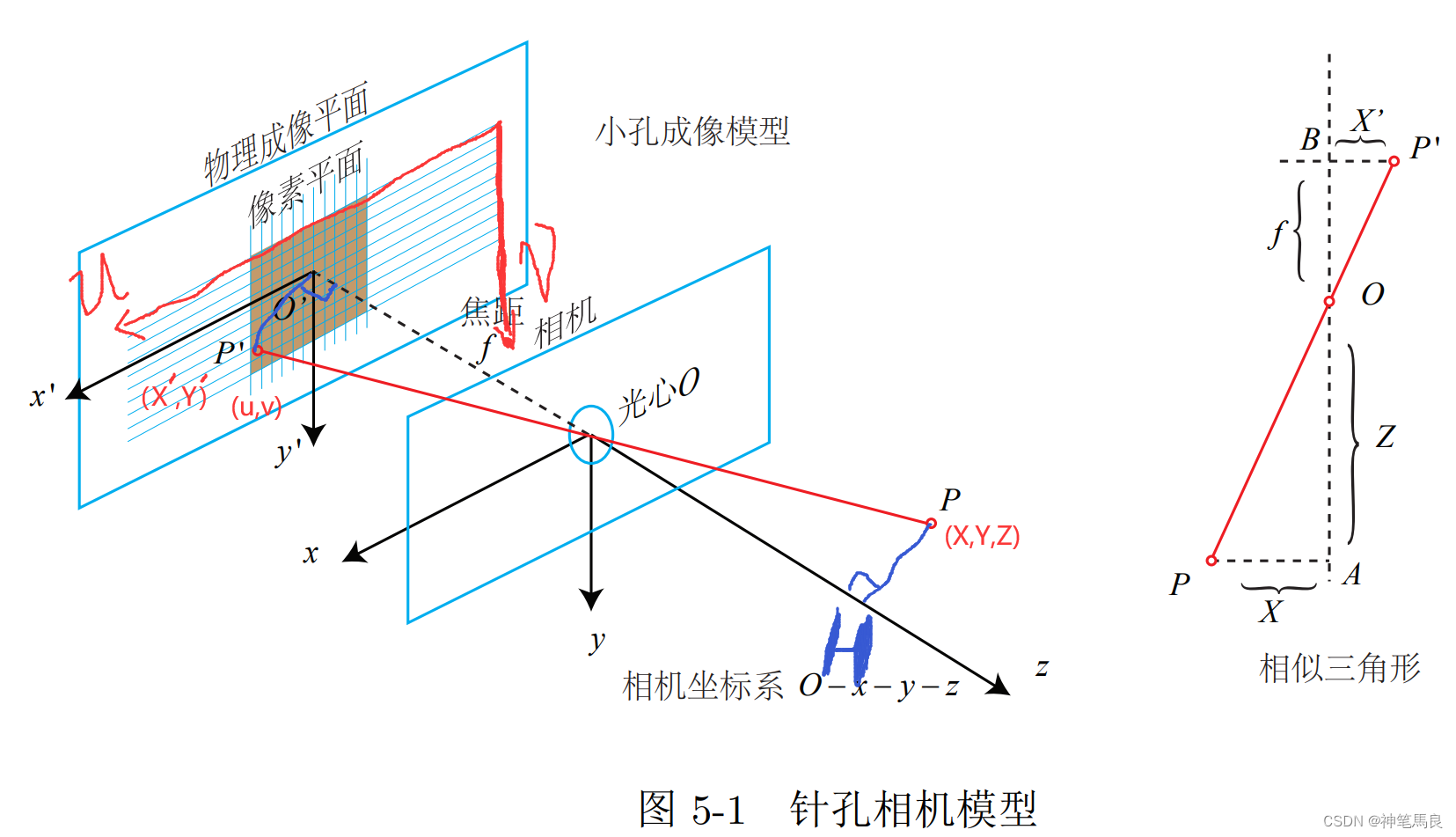
- 像素坐标系(u,v)

像素坐标系用于描述图像中像素点的位置。在像素坐标系中,图像被分割成一个个小的图像单元,每个图像单元称为像素。像素坐标系的原点通常位于图像的左上角,水平方向通常为u![]() 轴,垂直方向为v
轴,垂直方向为v![]() 轴,该坐标系以像素为单位量纲。
轴,该坐标系以像素为单位量纲。
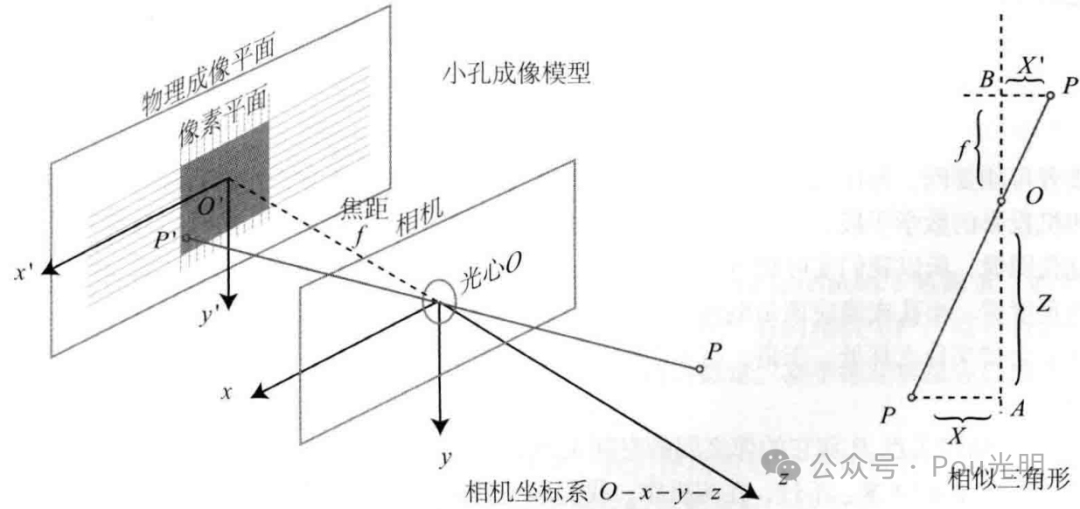
- 图像坐标系(x,y)

图像坐标系是指相机传感器成像平面的二维坐标系,即图像上的像素位置的坐标系。图像坐标系的原点在光轴与该平面的交点,x![]() 轴和y
轴和y![]() 轴分别与像素坐标系平行。一般用(X',Y')
轴分别与像素坐标系平行。一般用(X',Y')![]() 表示点的位置
表示点的位置
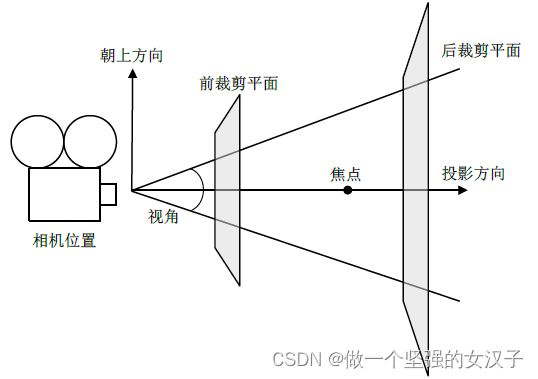
- 相机坐标系(Xc,Yc,Zc)

相机坐标系是相机内部的一个坐标系,用于描述相机传感器内的图像信息。在相机坐标系中,通常以镜头光心(光学中心)为原点,Zc![]() 轴与相机的光轴一致,指向前方。相机Xc
轴与相机的光轴一致,指向前方。相机Xc![]() 和Yc
和Yc![]() 分别和图像坐标系的水平方向及垂直方向平行。光心与图像坐标之间的距离为相机的焦距f
分别和图像坐标系的水平方向及垂直方向平行。光心与图像坐标之间的距离为相机的焦距f![]() 。
。