思路:BFS
这道BFS可谓是细节爆炸,对于编程能力和判断条件的能力的考察非常之大。
对于这道题,我们还需要额外考虑一些因素,那就是对于障碍物的考虑和机器人方位的考虑。
首先我们看第一个问题,就是对于障碍物的考虑,这里转载一下洛谷某一位大佬的图像:
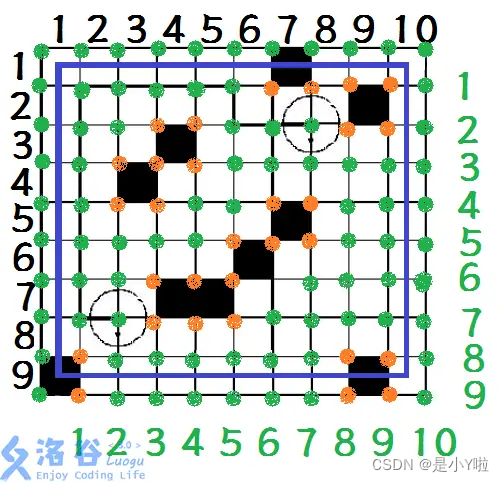
绿色的结点就是机器人走的结点,但是黑色的方块却是障碍物的地方。这就很矛盾,因为明明机器人走的是点,但是障碍物是以方块的形式呈现的。所以我们不得不想,怎么样才能处理这种关系呢?根据这样的图像呈现,我们可以知道,在蓝色方框之内的绿色结点才是机器人能够走的结点。因为在边界处,我们的机器人并不能走,因为自身就拥有宽度,所以我们在之后判断边界的时候需要额外注意,不能碰到边界位置。
根据黑色方块的位置坐标,我们可以转化成机器人不能走的结点在哪。那么上面的橙色结点就是机器人在障碍物的时候不能走的结点了。下结论来说,这个样例中机器人能够走的地方就是蓝色方框以内绿色结点的位置,且不会波及到橙色结点的地方。这里需要处理一下,也就是对于这个结点的处理。
接下来,我们再看第二个问题,机器人的方位怎么考虑?并且,我们在转动的时候是需要花费时间的,怎么样才能在转到某个方位的同时,花费少的时间呢?这里在代码中定义了几个数组:
dx:在x轴方向的行走,下标从1开始;
dy:同理在y轴方向的行走;
dt:顺时针方向上各个方向的编号;
dtt:数字i在dt数组中所对应的下标
abc:转动i次到达的方向所需要的最少旋转次数。
这里的abc数组可能难理解一些。
举个例子:你在北方向,北方向对应的编号是1,我们旋转i次,假设i=3(假设我们都是顺时针旋转),这个时候我们是不是旋转到了西方向呢?也就是当我们旋转到这个方向,顺时针我们用了3次,但是最小用的旋转次数其实就是逆时针旋转了1次,这个dtt数组存储的就是1,这就是这个数组的作用,解决了旋转次数最少的问题,也就是花费时间尽可能少的原则。
好了,这样我们就开始BFS遍历就行了。
注意:有几个特判需要知道:终点和起点可能会重合;终点是1的时候,肯定不能到;起点可能也有障碍物。
上代码:
#include<iostream>
#include<stdio.h>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<vector>
#include<algorithm>
#include<stack>
#include<queue>
#include <iomanip>
#include<sstream>
#include<numeric>
#include<map>
#include<limits.h>
#include<unordered_set>
#include<set>
#define int long long
#define MAX 501
#define _for(i,a,b) for(int i=a;i<(b);i++)
#define ALL(x) x.begin(),x.end()
using namespace std;
typedef pair<int, int> PII;
int n, m;
int counts;
int maps[MAX][MAX];//地图原先的构造
int a[MAX][MAX];//机器人能走的结点标志,1为不能走,0为能走
int dx[5] = { 0,-1,1,0,0 };
int dy[5] = { 0,0,0,-1,1 };
int dt[5] = { 0,1,4,2,3 };//方位
int dtt[5] = { 0,1,3,4,2 };//数字i在dt中的下标
int abc[5] = { 0,1,2,1,0 };//顺时针旋转到这个方位所需要的最小次数
int stx, sty;
int edx, edy;
struct Node {
int x;
int y;
int t;//机器人的方位
int times;//到达这里的最少时间
};
queue<Node>q;
char ch;
int direct;//最开始的方位
int flag = false;
void fangwei() {//标记方位号
switch (ch) {
case 'N':
direct = 1;
break;
case 'S':
direct = 2;
break;
case 'W':
direct = 3;
case 'E':
direct = 4;
break;
}
return;
}
void turn_into() {//根据原地图判断机器人能走的地方
_for(i, 1, n + 1) {
_for(j, 1, m + 1) {
if (maps[i][j] == 1) {
a[i - 1][j] = 1;
a[i][j - 1] = 1;
a[i - 1][j - 1] = 1;
a[i][j] = 1;
}
}
}
}
signed main() {
ios::sync_with_stdio(false);
cin.tie(NULL); cout.tie(NULL);
cin >> n >> m;
_for(i, 1, n + 1) {
_for(j, 1, m + 1) {
cin >> maps[i][j];
}
}
_for(i, 1, n + 1) {
_for(j, 1, m + 1) {
if (maps[i][j] == 1)
flag = 1;
}
}
cin >> stx >> sty >> edx >> edy;
cin >> ch;
fangwei();
turn_into();
Node firsts;//the first one
firsts.x = stx;
firsts.y = sty;
firsts.t = direct;
firsts.times = 0;
q.push(firsts);
while (!q.empty()) {
auto tmp = q.front();
q.pop();
_for(i, 1, 5) {
int zhuan = abc[i];//转动i次所得的方位的最小次数
int fangw = dtt[tmp.t] + i;//本来的方位+i,也就是现在旋转之后的方位
if (fangw == 5)fangw = 1;
if (fangw == 6)fangw = 2;
if (fangw == 7)fangw = 3;
if (fangw == 8)fangw = 4;
fangw = dt[fangw];
_for(j, 1, 4) {
int zoux = tmp.x + dx[fangw] * j;
int zouy = tmp.y + dy[fangw] * j;
if (zoux <= 0 || zoux >= n || zouy <= 0 || zouy >= m || (zoux == stx && zouy == sty) || a[zoux][zouy]==1)
{
break;
}
if ((tmp.times + zhuan + 1 < maps[zoux][zouy] || maps[zoux][zouy] == 0) && a[zoux][zouy] == 0) {
Node d;
d.x = zoux;
d.y = zouy;
d.t = fangw;
d.times = tmp.times + zhuan + 1;
maps[zoux][zouy] = d.times;//flag
q.push(d);
}
}
}
}
if ((maps[edx][edy] == 0 && (edx != stx && edy != sty)) || (maps[edx][edy] == 1))
cout << -1 << endl;
else if (n == 50 && m == 50 && flag == 0)
cout << maps[edx][edy] + 1 << endl;
else
cout << maps[edx][edy] << endl;
return 0;
}