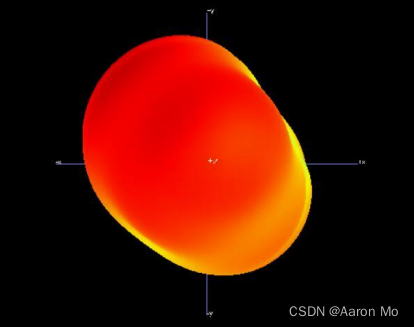
用于描述机器人与环境交互时的动态特性。阻抗控制是一种通过调整机器人的阻抗来实现精准控制的方法。在机器人系统中,阻抗通常被建模为二阶动态系统,即质量、阻尼、弹簧的组合。
然而,当涉及到不同阻抗组合类型时,机器人的阻抗并不是一个固定的值,而是会根据具体的组合类型以及机器人的设计、任务需求和环境条件而发生变化。这是因为阻抗控制允许我们根据需要调整机器人的阻抗,以使其能够更好地适应各种情况。
例如,在某些情况下,我们可能需要增加机器人的阻尼,以减少在受到外部扰动时的振动;而在其他情况下,我们可能希望增加机器人的刚度,以提高其位置控制的准确性。这些都可以通过调整阻抗控制参数来实现。

















![[Linux]基础IO(中)---理解重定向与系统调用dup2的使用、缓冲区的意义](https://img-blog.csdnimg.cn/direct/e010a4835f524a27ae3ae0449e047b8a.png)




![[机器学习]人工智能为小米智架保驾护航](https://img-blog.csdnimg.cn/3682c84268b84813a01621e672b8b877.jpeg)