阻抗控制,由Hogan在(Hogan,1985)中首次描述,已被广泛应用于机器人系统的控制中,以调节交互或接触任务的遵从性。阻抗表示运动与相互作用力或扭矩之间的动态关系。
阻抗控制是一种基于力的控制方法,通过调整机器人的阻抗来实现与环境的交互控制。在阻抗控制中,有两个核心概念:effort和flow。
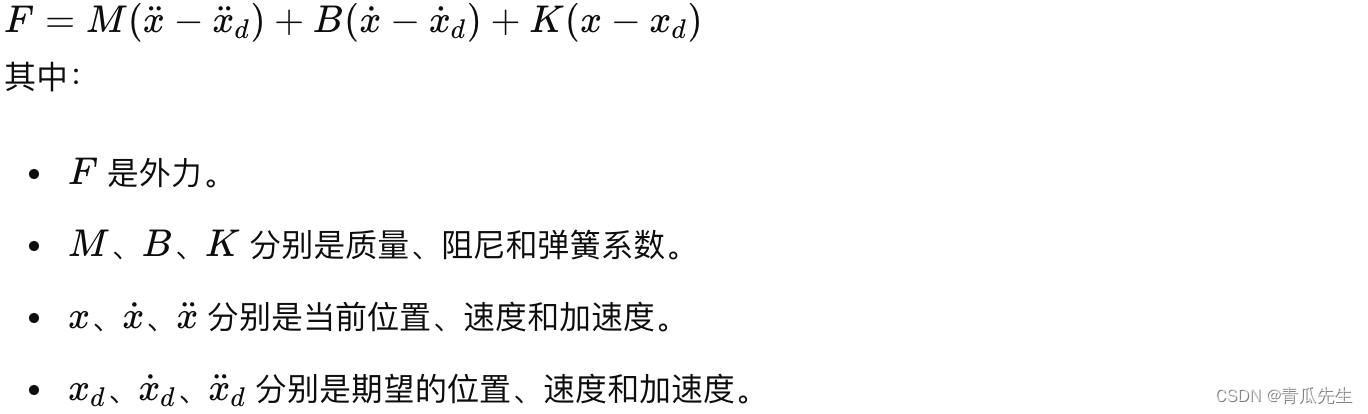
Effort在阻抗控制中表示施加在物体上的力或力矩,也可以理解为机器人端执行器的输出力或力矩。它通常是通过传感器测量得到的,反映了机器人与环境交互时所产生的力或力矩信息。Effort是阻抗控制中非常重要的参数,它直接关联到机器人与环境的交互效果。
Flow在阻抗控制中表示物体的变化速率,也可以理解为外部环境施加在机器人上的力或力矩。它代表了机器人与环境之间的动态交互过程,描述了机器人如何响应外部力的作用。Flow的信息也是通过传感器获取的,它提供了关于机器人运动状态和环境条件的关键信息。
通过effort和flow的控制,阻抗控制使机器人能够在与人类或环境进行交互时具有柔软、安全和可预测的特性。当机器人与环境接触时,它可以根据环境的变化调整自身的阻抗,以适应不同的交互需求。这种控制方法使得机器人能够在执行任务时保持稳定性,并减少与环境的碰撞和损伤。
阻抗控制中的effort和flow是相互关联的。通过调整机器人的阻抗参数,可以控制其对外界力的响应,进而实现与环境的协同交互。这种控制方法在协作机器人、康复机器人和物理交互任务中得到了广泛应用,以实现高质量、高效率和安全的人机交互体验。