1. 神经网络设计架构考虑更粗粒度的块(block)
在神经网络设计中,采用更粗粒度的块(block)结构是一种提高计算效率、减少资源消耗以及优化网络性能的设计策略。粗粒度的块通常指的是将多个连续的层或子网络模块组合在一起,形成一个相对独立且功能强大的计算单元。这样做的好处包括:
参数共享:粗粒度块内部可以实现权重的复用,减少网络的总参数量,有利于避免过拟合和提高模型的简洁性。
计算效率:通过合并多个层,有可能利用粗粒度数据流架构进行更有效的并行计算和内存访问优化,从而提升推理速度和降低延迟。
模块化设计:粗粒度块便于模型设计的模块化和重复利用,简化模型结构设计流程,并允许研究人员快速试验不同的块组合来创新模型架构。
可扩展性和灵活性:在诸如ResNet、Inception系列网络等现代深度学习模型中,粗粒度模块(如残差块、Inception模块)可以堆叠起来构建深层网络,同时也方便调整网络的深度以适应不同的应用场景和计算资源限制。
例如,在ResNet中,残差块就是一个典型的粗粒度设计,它允许网络通过跳过部分层直接传递信息,从而缓解梯度消失问题并促进深层网络的训练。另外,在移动端或嵌入式设备上的神经网络优化时,粗粒度设计也被广泛应用,通过设计高效且具有稀疏特性的卷积块来减少计算和存储开销。
2. 从层(layer)的角度构思网络
从层的角度构思网络是指在设计深度学习模型时,按照网络的层次结构来组织和规划各个组件。每一层负责执行特定的计算任务,通过层与层之间的相互作用,整个网络能够逐步从原始输入数据中提取、学习和表达复杂的特征。以下是构建神经网络时从层的角度考虑的一些要点:
输入层(Input Layer): 输入层是模型接收原始数据的第一层,不涉及任何计算,只是简单地传递数据到下一层。
隐藏层(Hidden Layers):
- 全连接层(Dense Layer):每个神经元与前一层的所有神经元全连接,适用于各种特征的线性或非线性组合。
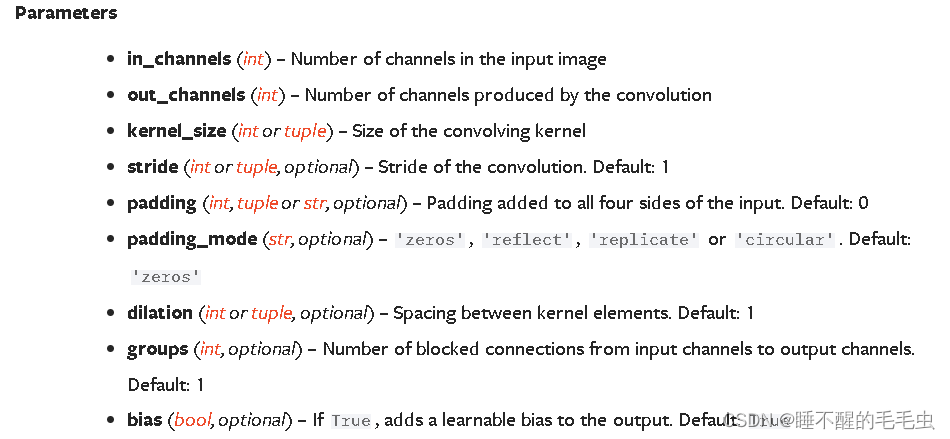
- 卷积层(Convolutional Layer):主要用于图像处理任务,通过卷积核对输入数据进行滑动窗口式的特征提取。
- 循环层(Recurrent Layer):在序列数据处理中应用广泛,如RNN、LSTM和GRU,它们具有时间维度的记忆功能,可以捕捉时间序列数据的长期依赖关系。
- 自注意力层(Self-Attention Layer):Transformer架构中的核心组成部分,能够使模型关注输入序列中的不同部分,动态地获取全局上下文信息。
激活函数层(Activation Function Layer): 如ReLU、sigmoid、tanh等,用于加入非线性特性,使得网络能够学习和表达更复杂的函数关系。
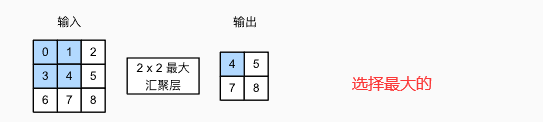
池化层(Pooling Layer): 减少空间维度(在CNN中)或时间维度(在RNN中)的大小,提取局部区域或时间段内的概要统计特征,同时降低计算复杂度。
归一化层(Normalization Layer): 如Batch Normalization、Layer Normalization等,用于加速训练收敛,稳定网络内部的分布,改善梯度流。
残差块(Residual Block): 在ResNet等网络中,通过添加捷径连接,使得信息可以直接从较浅层传至较深层,解决了深层网络的训练难题。
输出层(Output Layer): 根据任务的不同,输出层的形式各异,如对于分类任务,通常采用Softmax函数产生类别概率分布;对于回归任务,直接输出连续数值。
设计网络时,从层的角度出发,需要根据具体任务的需求选择合适类型的层,合理堆叠和配置这些层的结构,以达到最优的特征学习和表达能力。同时,还需要注意层间的连通性、参数初始化、正则化手段以及优化器的选择等因素,确保整个网络结构既具有良好的学习性能,又能有效防止过拟合。
3. 从层的角度构思网络与从块的角度设计网络架构
从层的角度构思网络架构: 在设计神经网络时,从层的角度出发,主要关注网络中各层的功能和顺序排列。每一层通常承担特定的计算任务,如特征提取、非线性变换、降维、分类等。层与层之间通过前向传播和反向传播进行信息流动和梯度传播。例如,在一个典型的全连接神经网络中,可能包含输入层、隐藏层(可能有多层)和输出层,每一层都由众多神经元组成,神经元间通过权重矩阵建立连接。
- 输入层接收原始数据;
- 隐藏层对输入数据进行特征变换,每一层可以认为是一个特征提取器,层与层之间的串行堆叠增加了网络的表示能力;
- 输出层生成网络的预测结果。
从块的角度设计网络架构: 块(Block)的概念是在网络设计中引入的一种模块化思想,它将一组连续的层封装成为一个复合单元,具备一定的独立性和完整性。块的设计旨在简化网络结构,便于重复利用和灵活组装。例如:
- 在ResNet中,残差块(Residual Block)是由两个或多个卷积层加上一个快捷连接组成的,这种设计允许信号绕过一些层直接流向后续层,从而解决了深度网络的训练难题;
- Inception模块是GoogleNet中提出的,它在一个块内包含多条不同大小的卷积路径和一个最大池化路径,集中在一个块内进行多样化的特征提取;
- Transformer中的多头注意力模块也是一个块的概念,它可以并行处理多种注意力机制,再将结果拼接起来,实现高效的特征融合。
块设计的好处在于可以更好地复用预先设计好的高效模块,结构更清晰,便于构建更深更大的网络,同时也有利于硬件加速和模型压缩。此外,块化设计还有助于研究者针对特定任务优化块结构,而不必每次都重新设计整个网络架构。
4.层视角和块视角的好处
在讨论深度学习模型时,从层视角和块视角来看待模型架构各有其独特的优点:
层视角的好处:
渐进式特征提取:层提供了一种从原始输入到最终输出的逐步特征转换过程,每一层通常专注于提取某一层次的特征。例如,在卷积神经网络中,浅层可以捕捉到边缘、线条等低级特征,而深层则可能提取到脸部、身体等高级抽象特征。
易于理解:通过分解网络为一系列明确的层,可以帮助开发者和研究者理解模型是如何逐步处理信息的,进而指导网络结构调整、参数优化和故障排查。
模块化设计:尽管层本身不能算严格意义上的模块,但通过定义清晰的层接口,可以实现不同层之间的自由组合,创建出适应不同任务的网络结构。
块视角的好处:
模块化和复用:块是层的组合,将多个层打包为一个功能性更强、更有针对性的模块,如ResNet中的残差块、Inception模块或Transformer中的注意力块。这种方式增强了模型的模块化程度,使得模型设计更加简洁和易于维护。
加速创新和实验:块作为一种更高层次的抽象,允许研究者专注于块内部结构的优化和创新,而无需每次重新设计整个网络。当一个块被证明有效时,可以迅速插入到其他模型结构中进行测试。
性能优化:块的设计通常考虑了计算效率和硬件优化,比如残差块有助于解决深度网络训练中的梯度消失问题,而Transformer中的多头注意力块则充分考虑了并行计算的可能性。
适应性强:块可以根据任务需求进行灵活组合和堆叠,既可以构造深层网络,也可以适应有限计算资源下的轻量化模型设计。
总之,层视角更侧重于理解和展示模型的细节和逐步处理流程,而块视角则更偏向于实现模型结构的抽象化、模块化和高效复用,两者结合有助于构建出强大且可定制化的深度学习模型架构。