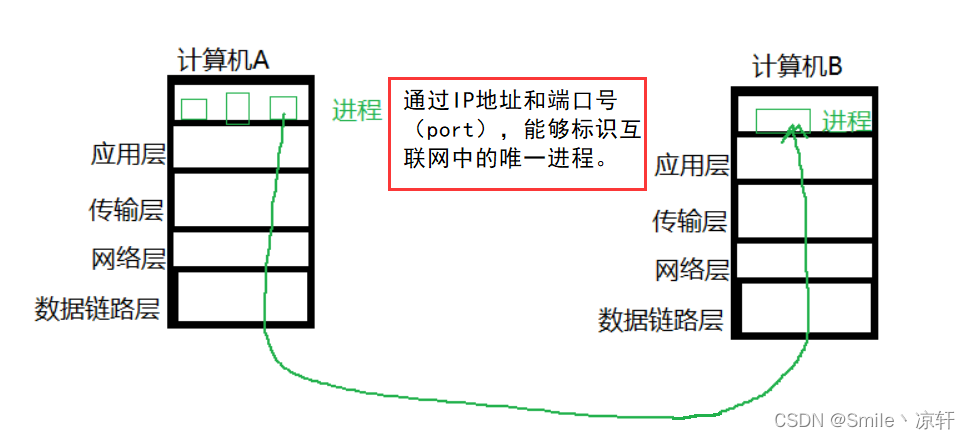
六、TCP网络编程
6.1IP地址字符串和整数之间的转换接口
//字符串转整数接口
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
int inet_aton(const char *cp, struct in_addr *inp);
int inet_pton(int af, const char *strptr, void *addrptr);//注意dst指的是in_addr *的地址
in_addr_t inet_addr(const char *cp);//将字符串转32位并且是网络序列的;
//整数转字符串
char *inet_ntoa(struct in_addr in);//将整数转为字符串并且将网络字节序转为主机字节序
const char *inet_ntop(int af, const void *addrptr,
char *strptr, socklen_t size);
需要注意的是inet_ntoa函数这个函数返回的是一个静态变量地址,使用时有覆盖问题和线程安全问题;最好是使用inet_ntop;
6.2补充知识
1.将网络套接字进行封装
构造函数之中最好少做一些有风险的事情,这样可以保证最起码对象是没有问题的;其他如打开文件之类的操作就交给其他函数去完成;
2.获取新连接会产生多个文件描述符
服务器本地的文件描述符用来进行监听连接,获取新连接,真正进行IO通信的文件描述符是后生成的;这样既提高了服务器的并发度;
3.telnet的使用
默认使用的就是TCP;
使用ctrl+]进入,回车后进行输入会回显数据,q退出;
4.TCP连接中的异常问题
当客户端直接退出时,服务端就会读到0,此时需要关闭为客户端打开的文件描述符;
5.网络抖动断开连接,客户端自动发起连接请求设计
6.tcp服务器重连
服务器断开后不能直接连接,一般要等待120s左右;
6.3使用接口
6.3.1创建套接字
和udp使用是一样的;
6.3.2绑定套接字
和udp使用是一样的;
6.3.3设置监听
由于TCP是面向连接的,所以在通信前要建立连接,将套接字设置为监听状态;
#include <sys/types.h>
#include <sys/socket.h>
int listen(int sockfd, int backlog);
//第二个参数表示的是全连接的队列的长度,一般不能设置的太大;
6.3.4获取新连接
此处包括以上接口都是阻塞的;
int accept(int sockfd, struct sockaddr *addr, socklen_t *addrlen);
//返回值,成功返回一个文件描述符,失败返回-1,错误码被设置;
获取新连接成功后要根据客户端的套接字信息提供服务;
6.3.5客户端发起连接请求
客户端需要绑定但是不需要显式进行绑定,系统会在客户端发起连接请求的时候自动绑定;
int connect(int sockfd, const struct sockaddr *addr,
socklen_t addrlen);
6.4查看网络状态
netstat -nltp
#n显示成数字,l表示listen,表示tcp
6.5单进程版echo服务器
缺陷是同时最多只能有一个客户端进行访问;UDP所有的客户端用的是一个sockfd,一个文件,可以同时读写,而TCP每个客户端对应一个sockfd,一个文件;单进程下对一个文件读写时,服务器因为处理消息是循环处理,必须读完退出循环服务,才能继续获取新连接,此时另一个客户端已经想打开的sockfd文件写入很多数据,当服务端接收连接请求时,会将发送过来的一大批数据处理后返回,这样就无法实现正常的服务器;
char buff[4096];
while (true)
{
// 数据读取
ssize_t n = read(sockfd, buff, sizeof(buff) - 1);
if (n > 0)
{
buff[n] = '\0';
std::cout << "client say@ " << buff << std::endl;
// 数据回显
std::string echo_string;
echo_string += "tcpserver say#";
echo_string += buff;
write(sockfd, echo_string.c_str(), echo_string.size());
}
else if (n == 0)
{
lg(Info, "%s:%d quit..., server close sockfd: %d", clientip.c_str(), clientport, sockfd);
break;
}
else
{
lg(Warning, "read error, sockfd: %d, clientip: %s, clientport: %d", sockfd, clientip.c_str(), clientport);
break;
}
}
6.6多进程版echo服务器
1.子进程可以看见listenfd_,所以要关闭无关的文件描述符;2.父进程不关心sockfd,要去接收新的连接,如果不关闭就会导致之后的很多文件描述符没有关闭,不断从新的下标打开文件描述符,而不是重新分配;
2.子进程中继续fork(),然后子进程退出,被父进程阻塞等待回收,父进程继续获取新的连接,孙子进程被操作系统领养,执行服务部分;也可以使用信号异步等待的方式实现;
3.也可以在循环执行获取连接和执行任务之前创建子进程,但是会存在数据不一致问题需要用信号量;
4.多进程创建的成本过高,所以应该选择多线程;
//方式1
pid_t id = fork();
if (id < 0)
{
std::cerr << "fork error" << std::endl;
}
else if (id == 0)
{
close(listensockfd_);
if (fork() > 0)
{
exit(0);
}
// 此处执行代码的是孙子进程,会被做系统领养
service(sockfd, clientip, clientport);
close(sockfd);
exit(0);
}
close(sockfd);
pid_t rid = waitpid(id, nullptr, 0);
(void)rid;
//方式2
signal(SIGCHLD, SIG_IGN);
pid_t id = fork();
if (id == 0)
{
close(listensockfd_);
service(sockfd, clientip, clientport);
close(sockfd);
exit(0);
}
close(sockfd);
6.7多线程版本的echo服务器
1.因为线程中大部分资源都是共享的所以不可以关闭文件描述符,否则会出错;
2.线程没有退出时会有峰值的,服务器此时压力很大,所以长服务是不合理的;
3.创建线程也是有成本的,即系统调用的成本,所以应该用线程池;
struct threaddata
{
threaddata(const int sockfd, const std::string &clientip, const uint16_t &clientport, tcpserver *t) : sockfd_(sockfd), clientport_(clientport),
clientip_(clientip), t_(t)
{
}
int sockfd_;
uint16_t clientport_;
std::string clientip_;
tcpserver *t_;
};
pthread_t tid;
threaddata *td = new threaddata(sockfd, clientip, clientport, this);
pthread_create(&tid, nullptr, routine, (void *)td);
static void *routine(void *args)
{
threaddata *td = static_cast<threaddata *>(args);
pthread_detach(pthread_self());
td->t_->service(td->sockfd_, td->clientip_, td->clientport_);
delete td;
return nullptr;
}
6.8线程池版本的echo服务器
1.线程池里不可以执行长时间的服务;2.服务器关闭了客户端套接字,客户端继续写入,会触发服务器异常,返回一个RST消息,然后客户端操作系统发送SIGPIPE信号杀死客户端进程;
class Task
{
public:
Task(const int &sockfd, const std::string &clientip, const uint16_t &clientport)
: sockfd_(sockfd), clientport_(clientport), clientip_(clientip) {}
void run()
{
char buff[4096];
// 数据读取
ssize_t n = read(sockfd_, buff, sizeof(buff) - 1);
if (n > 0)
{
buff[n] = '\0';
std::cout << "client say@ " << buff << std::endl;
// 数据回显
std::string echo_string;
echo_string += "tcpserver say#";
echo_string += buff;
write(sockfd_, echo_string.c_str(), echo_string.size());
}
else if (n == 0)
{
lg(Info, "%s:%d quit..., server close sockfd: %d", clientip_.c_str(), clientport_, sockfd_);
}
else
{
lg(Warning, "read error, sockfd: %d, clientip: %s, clientport: %d", sockfd_, clientip_.c_str(), clientport_);
}
close(sockfd_);
}
void operator()()
{
run();
}
~Task()
{
}
private:
int sockfd_;
uint16_t clientport_;
std::string clientip_;
};
Task t(sockfd, clientip, clientport);
ThreadPool<Task>::GetInstance()->Push(t);
#include <iostream>
#include <vector>
#include <string>
#include <queue>
#include <pthread.h>
#include "Task.hpp"
#include <unistd.h>
struct ThreadInfo
{
pthread_t tid;
std::string name;
};
static const int defaultnum = 5;
template <class T>
class ThreadPool
{
private:
void Lock()
{
pthread_mutex_lock(&_mutex);
}
void UnLock()
{
pthread_mutex_unlock(&_mutex);
}
void Wakeup()
{
pthread_cond_signal(&_cond);
}
void ThreadSleep()
{
pthread_cond_wait(&_cond, &_mutex);
}
bool IsQueueEmpty()
{
return _tasks.empty();
}
std::string GetThreadName(pthread_t tid)
{
for (const auto e : _threads)
{
if (e.tid == tid)
{
return e.name;
}
}
return "None";
}
public:
T Pop()
{
T t = _tasks.front();
_tasks.pop();
return t;
}
void Push(const T &t)
{
Lock();
_tasks.push(t);
Wakeup();
UnLock();
}
static void *HandlerTask(void *args) // 类内函数默认都有一个this指针,静态成员函数无法直接看到成员属性
{
ThreadPool<T> *tp = static_cast<ThreadPool<T> *>(args);
std::string name = tp->GetThreadName(pthread_self());
while (true)
{
tp->Lock();
while (tp->IsQueueEmpty())
{
tp->ThreadSleep();
}
Task t = tp->Pop();
tp->UnLock();
t();
}
}
void Start() // 创建线程
{
int num = _threads.size();
for (int i = 0; i < num; i++)
{
_threads[i].name = "thread-" + std::to_string(i + 1);
pthread_create(&(_threads[i].tid), nullptr, HandlerTask, this);
}
}
static ThreadPool<T> *GetInstance()
{
pthread_mutex_lock(&_smutex);
if (_tp == nullptr)
{
std::cout << "log : singleton create done first!" << std::endl;
_tp = new ThreadPool<T>();
}
pthread_mutex_unlock(&_smutex);
return _tp;
}
private:
ThreadPool(int num = defaultnum) : _threads(num)
{
pthread_mutex_init(&_mutex, nullptr);
pthread_cond_init(&_cond, nullptr);
}
ThreadPool(const ThreadPool<T> &tp) = delete;
const ThreadPool<T> &operator=(const ThreadPool<T> tp) = delete;
~ThreadPool()
{
pthread_mutex_destroy(&_mutex);
pthread_cond_destroy(&_cond);
}
std::vector<ThreadInfo> _threads;
std::queue<T> _tasks;
pthread_mutex_t _mutex;
pthread_cond_t _cond;
static ThreadPool<T> *_tp;
static pthread_mutex_t _smutex;
};
template <class T>
ThreadPool<T> *ThreadPool<T>::_tp = nullptr;
template <class T>
pthread_mutex_t ThreadPool<T>::_smutex = PTHREAD_MUTEX_INITIALIZER;