1 回顾
串口通信的代码编写结构还是与中断一样,不同的是:
初始中断函数条件涉及到串口通信相关的寄存器和定时器1相关的寄存器(定时器1用于产生波特率),但初始条件中的中断寄存器只考虑串口通信而不考虑定时器1。
void 函数名()
{
包含两部分寄存器:定时器1+串口通信
定时器1: TMOD (选择模式),TH1和TL1(初始计时寄存器),TR1(TCON寄存器里的启动计时按钮)
串口通信:SCON(总的来说功能是模式选择),AUXR(辅助寄存器),中断开关(分开关+总开关)
}
void 函数名() interrupt 中断号
{
就是写时间到后执行什么。注意中断号要写串口通信的,而不是定时器的,因为定时器作用只是产生波特率而不是产生中断。
}
2 实践
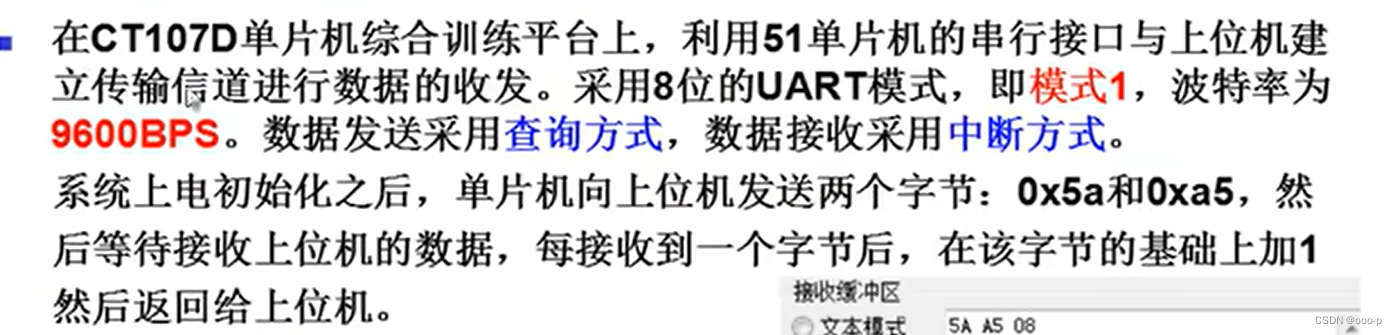
2.1 任务
2.2 思路
题目中涉及到串口通信。那么串口通信的结构就要先写下来:
void 函数名()
{
}
void 函数名() interrupt 中断号
{
}
先考虑初始函数怎么写:
用定时器1产生波特率9600: (那么就要写与定时器1有关的寄存器)
TMOD,TR1,TL1,TH1 ,中断(但不使用)
(1)波特率9600查表得到当时钟为11.059MHZ,定时器1用方式2工作即8位重装,写入0xfd,即TL1,TH1= 0xfd
(2)刚才说到要用8位重装模式
查手册之TMOD= 0x20
(3)要让定时器允许定时则TR1 = 1。
初始函数中还涉及串口通信:
与串口通信有关的寄存器: SCON, PCON,AUXR, SBUF,中断
SCON:(上一篇文章查表,或直接查手册)常用的工作模式是8位UART波特率可变,即SM0,SM1为01,那么TB8和RB8和SM2为0(方式1时不使用),TI和RI初始也应该为0,REN=1,要允许接收。
即:01010000
因此,SCON=0x50.
PCON:在定时器1串口1情况写,只考虑SMOD那位,由波特率常用表,我们选了那一行的SMOD显示为0,故SMOD=0,故PCON=0x00。
AUXR: AUXR= 0x00(上一篇文章有解释)
中断:总开关EA=1,分开关ES=1
SBUF是存放数据的所以不是写在初始函数中
接下看看看中断程序函数怎么写:
(1)首先是中断号,因为中断用的是串口通信而不是定时器1,故中断号应是对应串口通信的中断号为4。
(2)任务是要我们接收信息。那么就要用到接收判断位RI,首先判断RI,当RI=1表示接收完成数据,然后再把接收到的数据存下来。(我们前一篇说过,发送的数据会暂时存到SBUF),那么现在我们要接收,就要定义一个变量把SBUF的数据存起来,即data= SBUF,然后再把RI清零。(由于这里只考虑接收,故在中断中只是写接收就行了)
虽然在中断中不用判断发送,但是还是要写一个发送函数来传给单片机,然后接收出来让我们看看是否嗯那个完成接收工作。
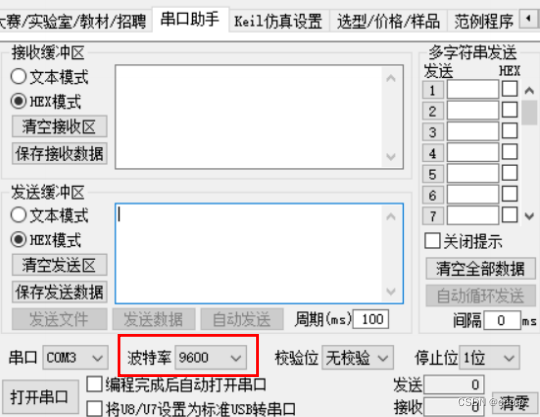
注意:还有因为任务是产生9600的波特率,因此串口收发助手的波特率记得调到9600!!
2.3 完整代码
这里我发现很奇怪,要把发送内容的函数放到main函数的循环里面才能让串口助手收到数据,放在main的循环外面是不行的,这样就导致其一直在发送,串口助手就一直在循环接收数据,小蜜蜂老师教程里却不会这样,为啥呢?求助大佬!!
(以下是在蓝桥杯单片机中可以使用的代码)
#include "stc15f2k60s2.h"
void selectHC138(unsigned int n)
{
switch(n)
{
case 0:
P2 = (P2 & 0x1f) | 0x00; break;
case 1:
P2 = (P2 & 0x1f) | 0x20; break;
case 2:
P2 = (P2 & 0x1f) | 0x40; break;
case 3:
P2 = (P2 & 0x1f) | 0x60; break;
case 4:
P2 = (P2 & 0x1f) | 0x80; break;
case 5:
P2 = (P2 & 0x1f) | 0xa0; break;
case 6:
P2 = (P2 & 0x1f) | 0xc0; break;
case 7:
P2 = (P2 & 0x1f) | 0xe0; break;
}
}
//=============================send and recieve===============
void Init_Timer1()
{
TH1 = 0xfd;
TL1 = 0xfd;
TMOD = 0x20;
TR1 = 1;
SCON = 0x50;
// PCON = 0x00;
AUXR = 0x00;
ES = 1;
EA = 1;
}
unsigned char urdat;
void chuankou() interrupt 4
{
// if(TI == 1)
// {
// urdat = SBUF;
// TI = 0;
// }
if (RI == 1)
{
//SBUF = urdat;
urdat = SBUF;
RI = 0;
}
}
//=====================================================
void send(unsigned char dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
void close()
{
selectHC138(5);
P0 = 0x00;
selectHC138(4);
P0 = 0xff;
}
void main()
{
close();
Init_Timer1();
while(1)
{
send(0x5a);
send(0xa5);
}
}