概述
基于视觉的同步定位与地图构建(SLAM)算法与粒子群优化(PSO)算法在无人机路径规划中的结合是一个复杂但富有挑战性的问题。视觉SLAM算法用于实时定位和地图构建,而PSO算法则用于优化无人机的飞行路径。以下是一个简化的步骤说明,以及如何在MATLAB中复现这个过程。
步骤说明
视觉SLAM算法:
特征提取与匹配:从无人机相机捕获的图像中提取特征点(如SIFT、SURF等),并与之前的图像进行匹配。
运动估计:根据特征点匹配结果,估计无人机的运动(位置和姿态)。
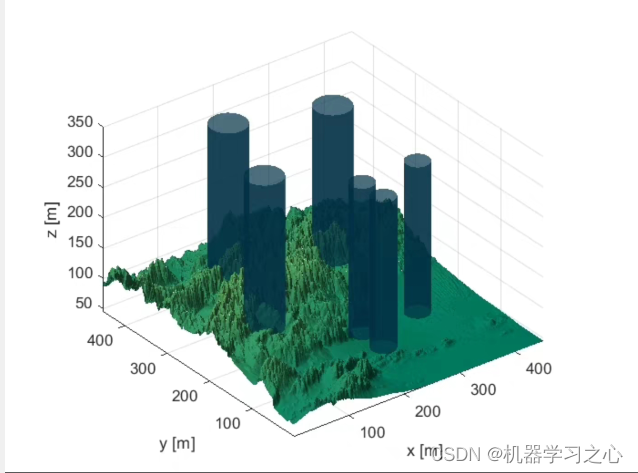
地图构建:根据估计的运动信息,构建环境地图。
粒子群优化(PSO)算法:
初始化粒子群:在搜索空间中随机初始化一群粒子,每个粒子代表一个可能的无人机路径。
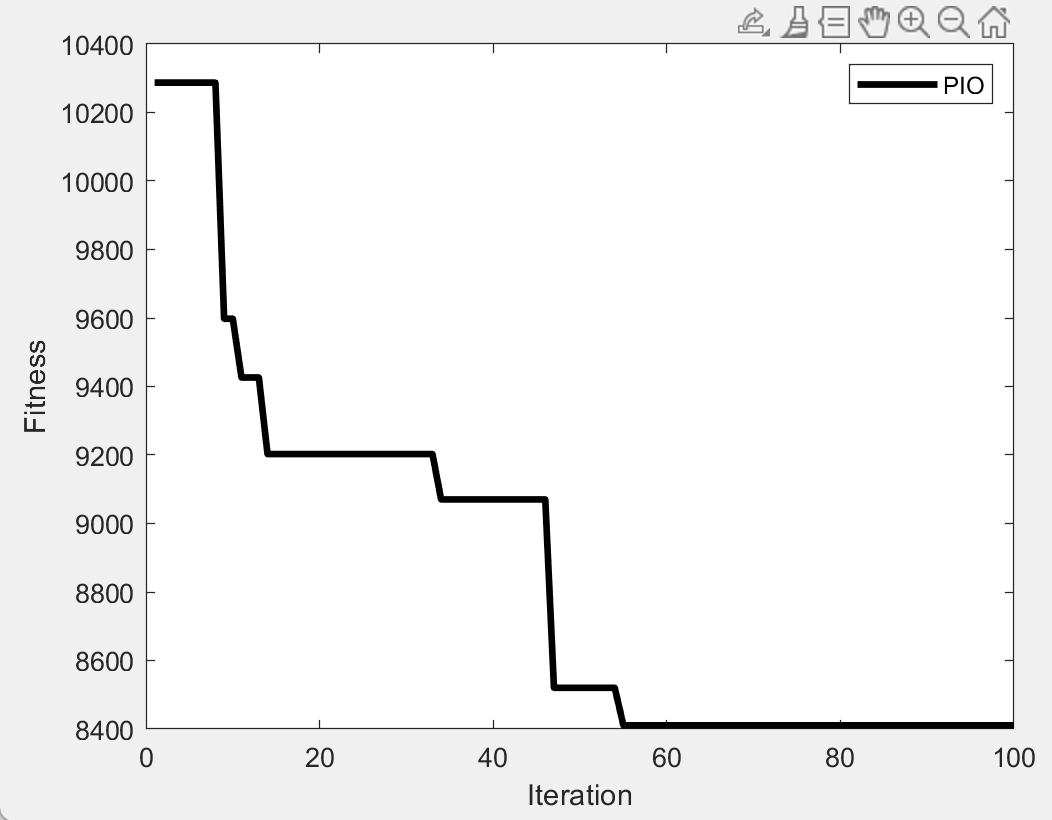
评估适应度:根据路径的安全性、长度、平滑度等因素,计算每个粒子的适应度值。
更新速度和位置:根据个体最优和全局最优,更新每个粒子的速度和位置。
迭代优化:重复评估适应度和更新粒子,直到满足终止条件(如达到最大迭代次数或适应度值收敛)。
结合SLAM与PSO:
利用SLAM构建地图:在无人机飞行过程中,使用视觉SLAM算法构建环境地图。
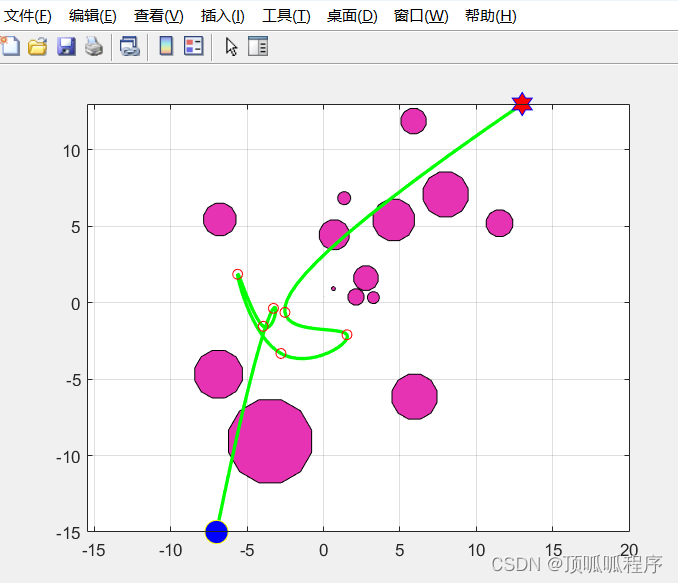
基于地图的PSO路径规划:将构建的地图作为PSO算法的输入,用于评估粒子的适应度(即路径的优劣)。
实时更新与优化:随着无人机的飞行和地图的更新,实时调整PSO算法中的粒子群,以优化无人机的路径。
MATLAB复现
在M