# 前置知识
APP 打开文件时,可以得到一个整数,这个整数被称为文件句柄。对于 APP的每一个文件句柄,在内核里面都有一个“ struct file”与之对应。
- 使用open函数时,用户态调用 API 触发异常进入内核
- 内核识别异常后,取出异常值,从而调用sys_call_table[__NR_open],sys_call_table就是一个数组,其值为typedef void (*sys_call_ptr_t)(void)类型的函数指针,内容大致如下:
__SYSCALL_COMMON(0, sys_read, sys_read)
__SYSCALL_COMMON(1, sys_write, sys_write)
__SYSCALL_COMMON(2, sys_open, sys_open)
__SYSCALL_COMMON(3, sys_close, sys_close)
__SYSCALL_COMMON(5, sys_newfstat, sys_newfstat)
...
...
...- 最后调用sys_open函数,sys_open函数定义如下:
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, int, mode)
{
long ret;
if (force_o_largefile())
flags |= O_LARGEFILE;
ret = do_sys_open(AT_FDCWD, filename, flags, mode);
/* avoid REGPARM breakage on x86: */
asmlinkage_protect(3, ret, filename, flags, mode);
return ret;
}- 在sys_open函数里面,又调用了 de_sys_open 函数,定义如下:
long do_sys_open(int dfd, const char __user *filename, int flags, int mode)
{
char *tmp = getname(filename);
int fd = PTR_ERR(tmp);
if (!IS_ERR(tmp)) {
fd = get_unused_fd_flags(flags); /* 获取未使用的函数句柄 */
if (fd >= 0) {
struct file *f = do_filp_open(dfd, tmp, flags, mode, 0); /* 打开文件,得到file结构体 */
if (IS_ERR(f)) {
put_unused_fd(fd);
fd = PTR_ERR(f);
} else {
fsnotify_open(f);
fd_install(fd, f); /* 在当前进程里面记录下来 */
}
}
putname(tmp);
}
return fd;
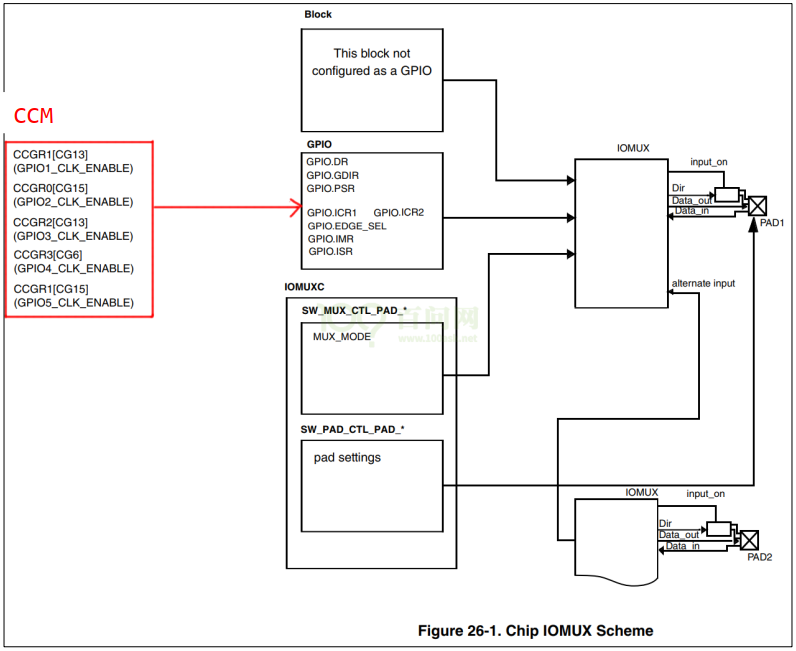
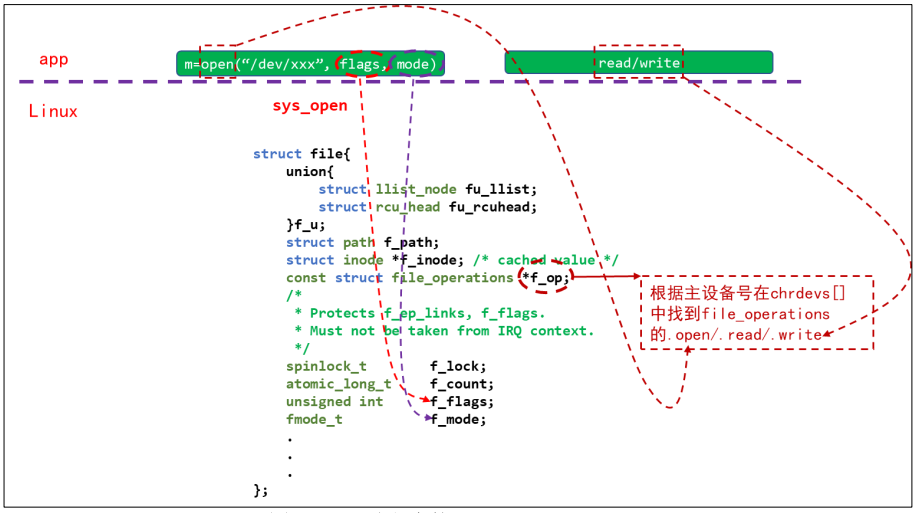
}通过以上过程,就绑定了文件句柄fd与file结构体,后续操作文件句柄fd,实际上就是操作文件结构体file,文件结构体file如下,在结构体中,有f_op,里面包含了读写等对文件的操作;有f_flags,这就是使用open函数时的打开模式;有f_pos,这就是使用读写函数时,指向文件的位置,整体情况如下图:

# 驱动编写流程
从上述可以得出,当我们使用open、write、read、close等函数操作驱动时,最终调用的是最底层file_operations结构体中的open、write、read、close函数。那么将这些函数完善,并且上报到系统,就是编写驱动程序。

#include <linux/module.h>
#include <asm/uaccess.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#define __CHRDEV_REGION_
#define MIN(a, b) (a < b ? a : b)
#define DEVICE_DRIVER_NAME "test_drv" /* 设备驱动名称 */
#define DEVICE_DRIVER_CNT 1 /* 设备号个数 */
static char kernal_buffer[1024];
typedef struct {
dev_t devid; /* 设备号 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct cdev cdev; /* cdev */
char class_name[20]; /* 类名称 */
struct class *class; /* 类 */
struct device *device; /* 设备 */
}test_drv_Typedef;
static test_drv_Typedef test_driver = {
.devid = 0,
.major = 0,
.minor = 0,
.class_name = "test_class",
.class = NULL,
.device = NULL
};
static int test_drv_open(struct inode *node, struct file *fle)
{
printk("test_drv_open\r\n");
return 0;
}
static int test_drv_release(struct inode *node, struct file *fle)
{
printk("test_drv_open\r\n");
return 0;
}
static ssize_t test_drv_write(struct file *fle, const char __user *buf, size_t size, loff_t *offest)
{
ssize_t err;
printk("test_drv_write\r\n");
err = copy_from_user(kernal_buffer, buf, MIN(sizeof(kernal_buffer), size));
return err;
}
static ssize_t test_drv_read(struct file *fle, char __user *buf, size_t size, loff_t *offest)
{
ssize_t err;
printk("test_drv_read\r\n");
err = copy_to_user(buf, kernal_buffer, MIN(sizeof(kernal_buffer), size));
return err;
}
/* 2. 编写 file_operations 结构体 */
static const struct file_operations test_drv_op = {
.owner = THIS_MODULE,
.open = test_drv_open,
.release = test_drv_release,
.write = test_drv_write,
.read = test_drv_read,
};
/* 3. 编写字符设备驱动模块加载 */
/* 3.1 创建设备号、注册字符设备驱动 */
/* 3.2 创建一个class类型的对象 */
/* 3.3 生成设备节点并导出到用户空间 */
static int __init test_drv_init(void)
{
int ret = 0;
printk("test_drv_init\r\n");
/* 创建设备号 */
#ifndef __CHRDEV_REGION_
/* 静态和动态注册两种方法,主要是通过判断给定的主设备号是否为0来进行区别 */
test_driver.major = register_chrdev(0, DEVICE_DRIVER_NAME, &test_drv_op);
test_driver.devid = MKDEV(test_driver.major, test_driver.minor);
#else
if(test_driver.major) /* 静态注册 */
{
test_driver.devid = MKDEV(test_driver.major, test_driver.minor);
ret = register_chrdev_region(test_driver.devid, DEVICE_DRIVER_CNT, DEVICE_DRIVER_NAME);
if(ret < 0)
{
printk("register_chrdev_region fail\r\n");
goto _err_out_regchrdev;
}
}
else /* 动态注册 */
{
ret = alloc_chrdev_region(&test_driver.devid, 0, DEVICE_DRIVER_CNT, DEVICE_DRIVER_NAME);
if(ret < 0)
{
printk("alloc_chrdev_region fail\r\n");
goto _err_out_regchrdev;
}
test_driver.major = MAJOR(test_driver.devid);
test_driver.minor = MINOR(test_driver.devid);
}
/* 初始化cdev */
test_driver.cdev.owner = THIS_MODULE;
cdev_init(&test_driver.cdev, &test_drv_op);
/* 添加一个cdev */
cdev_add(&test_driver.cdev, test_driver.devid, DEVICE_DRIVER_CNT);
#endif
test_driver.class = class_create(THIS_MODULE, test_driver.class_name);
if (IS_ERR(test_driver.class))
{
printk("class_create fail\r\n");
ret = PTR_ERR(test_driver.class);
goto _err_out_class_crate;
}
test_driver.device = device_create(test_driver.class, NULL, test_driver.devid, NULL, DEVICE_DRIVER_NAME);
if(IS_ERR(test_driver.device))
{
printk("device_create fail\r\n");
ret = PTR_ERR(test_driver.device);
goto _err_out_device_create;
}
return 0;
_err_out_device_create:
class_destroy(test_driver.class);
_err_out_class_crate:
#ifndef __CHRDEV_REGION_
unregister_chrdev(test_driver.devid, DEVICE_DRIVER_NAME);
#else
unregister_chrdev_region(test_driver.devid, DEVICE_DRIVER_CNT);
cdev_del(&test_driver.cdev);
_err_out_regchrdev:
#endif
return ret;
}
/* 4. 编写字符设备驱动模块卸载*/
/* 4.1 摧毁设备 */
/* 4.2 摧毁类 */
/* 4.3 卸载字符设备驱动 */
static void __exit test_drv_exit(void)
{
printk("test_drv_exit\r\n");
device_destroy(test_driver.class, test_driver.devid);
class_destroy(test_driver.class);
#ifndef __CHRDEV_REGION_
unregister_chrdev(test_driver.major, DEVICE_DRIVER_NAME);
#else
unregister_chrdev_region(test_driver.devid, DEVICE_DRIVER_CNT);
cdev_del(&test_driver.cdev);
#endif
}
/* 5. 指定驱动出入口 */
module_init(test_drv_init);
module_exit(test_drv_exit);
/* 6. 完善驱动信息 */
MODULE_LICENSE("GPL"); //添加模块 LICENSE 信息
MODULE_AUTHOR("JYW"); //添加模块作者信息步骤1:确定主设备号和次设备号
设备号的组成:
为了方便管理, Linux 中每个设备都有一个设备号,设备号由主设备号和次设备号两部分组成,主设备号表示某一个具体的驱动,次设备号表示使用这个驱动的各个设备,Linux 提供了一个名为 dev_t 的数据类型表示设备号, dev_t 定义在文件 include/linux/types.h 里面,定义如下:
typedef __u32 __kernel_dev_t; typedef __kernel_dev_t dev_t;dev_t 其实就是 unsigned int 类型,是一个 32 位的数据类型。这 32 位的数据构成了主设备号和次设备号两部分,其中高 12 位为主设备号, 低 20 位为次设备号
设备号的操作函数:
/* 从 dev_t 中获取主设备号 */
#define MAJOR(dev) ((unsigned int) ((dev) >> MINORBITS))
/* 从 dev_t 中获取次设备号 */
#define MINOR(dev) ((unsigned int) ((dev) & MINORMASK))
/* 给定的主设备号和次设备号的值组合成 dev_t 类型的设备号 */
#define MKDEV(ma,mi) (((ma) << MINORBITS) | (mi))步骤2:编写 file_operations 结构体
file_operations 的结构体就是 Linux 内核驱动操作函数集合,内容如下所示:
struct file_operations {
struct module *owner; /* 拥有该结构体的模块的指针,一般设置为 THIS_MODULE */
loff_t (*llseek) (struct file *, loff_t, int); /* 修改文件当前的读写位置 */
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *); /* 读取设备文件 */
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *); /* 向设备文件写入(发送)数据 */
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iterate) (struct file *, struct dir_context *);
unsigned int (*poll) (struct file *, struct poll_table_struct *); /* 轮询函数,用于查询设备是否可以进行非阻塞的读写 */
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long); /* 提供对于设备的控制功能,与应用程序中的 ioctl 函数对应 */
long (*compat_ioctl) (struct file *, unsigned int, unsigned long); /* 与unlocked_ioctl 函数功能一样 */
int (*mmap) (struct file *, struct vm_area_struct *); /* 将设备的内存映射到进程空间中(也就是用户空间) */
int (*mremap)(struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *); /* 打开设备文件 */
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *); /* 释放(关闭)设备文件 */
int (*fsync) (struct file *, loff_t, loff_t, int datasync); /* 刷新待处理的数据,用于将缓冲区中的数据刷新到磁盘中 */
int (*aio_fsync) (struct kiocb *, int datasync); /* 与 fasync 函数的功能类似,只是 aio_fsync 是异步刷新待处理的数据 */
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
#ifndef CONFIG_MMU
unsigned (*mmap_capabilities)(struct file *);
#endif
};常用函数介绍:
/*
* @description : 打开设备
* @param – : 传递给驱动的 inode
* @param - : 设备文件, file 结构体有个叫做 private_data 的成员变量
* 一般在 open 的时候将 private_data 指向设备结构体。
* @return : 0 成功;其他 失败
*/
int (*open) (struct inode *, struct file *);/*
* @description : 关闭/释放设备
* @param - : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
int (*release) (struct inode *, struct file *); /*
* @description : 向设备写数据
* @param - : 设备文件,表示打开的文件描述符
* @param - : 要写给设备写入的数据
* @param - : 要写入的数据长度
* @param - : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);/*
* @description : 从设备读取数据
* @param - : 要打开的设备文件(文件描述符)
* @param - : 返回给用户空间的数据缓冲区
* @param - : 要读取的数据长度
* @param - : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);unsigned long copy_from_user(void *to, const void __user *from, unsigned long n)
unsigned long copy_to_user(void *to, const void __user *from, unsigned long n)以下是对参数进行讲解:
- struct inode
/* * 内核使用inode结构体在内核内部表示一个文件。因此,它与表示一个已经打开的文件描述符的结构体(file * 文件结构)是不同的,我们可以使用多个file 文件结构表示同一个文件的多个文件描述符,但此时,所有这 * 些file文件结构全部都必须只能指向一个inode结构体 */ struct inode { umode_t i_mode; unsigned short i_opflags; kuid_t i_uid; /* inode拥有者id */ kgid_t i_gid; /* inode所属群组id */ unsigned int i_flags; #ifdef CONFIG_FS_POSIX_ACL struct posix_acl *i_acl; struct posix_acl *i_default_acl; #endif const struct inode_operations *i_op; struct super_block *i_sb; struct address_space *i_mapping; #ifdef CONFIG_SECURITY void *i_security; #endif /* Stat data, not accessed from path walking */ unsigned long i_ino; /* * Filesystems may only read i_nlink directly. They shall use the * following functions for modification: * * (set|clear|inc|drop)_nlink * inode_(inc|dec)_link_count */ union { const unsigned int i_nlink; unsigned int __i_nlink; }; dev_t i_rdev; /* 若是设备文件,表示记录设备的设备号 */ loff_t i_size; /* inode所代表大少 */ struct timespec i_atime; /* inode最近一次的存取时间 */ struct timespec i_mtime; /* inode最近一次修改时间 */ struct timespec i_ctime; /* inode的生成时间 */ spinlock_t i_lock; /* i_blocks, i_bytes, maybe i_size */ unsigned short i_bytes; unsigned int i_blkbits; blkcnt_t i_blocks; #ifdef __NEED_I_SIZE_ORDERED seqcount_t i_size_seqcount; #endif /* Misc */ unsigned long i_state; struct mutex i_mutex; unsigned long dirtied_when; /* jiffies of first dirtying */ unsigned long dirtied_time_when; struct hlist_node i_hash; struct list_head i_wb_list; /* backing dev IO list */ struct list_head i_lru; /* inode LRU list */ struct list_head i_sb_list; union { struct hlist_head i_dentry; struct rcu_head i_rcu; }; u64 i_version; atomic_t i_count; atomic_t i_dio_count; atomic_t i_writecount; #ifdef CONFIG_IMA atomic_t i_readcount; /* struct files open RO */ #endif const struct file_operations *i_fop; /* former ->i_op->default_file_ops */ struct file_lock_context *i_flctx; struct address_space i_data; struct list_head i_devices; union { struct pipe_inode_info *i_pipe; struct block_device *i_bdev; struct cdev *i_cdev; /* 若是字符设备,对应的为cdev结构 */ }; __u32 i_generation; #ifdef CONFIG_FSNOTIFY __u32 i_fsnotify_mask; /* all events this inode cares about */ struct hlist_head i_fsnotify_marks; #endif void *i_private; /* fs or device private pointer */ }; /* 内核函数从inode中提取设备号 */ /* 提取主设备号 */ static inline unsigned imajor(const struct inode *inode){ return MAJOR(inode->i_rdev); } /* 提取次设备号 */ static inline unsigned iminor(const struct inode *inode) { return MINOR(inode->i_rdev); }
- struct file
/* * file结构体指示一个已经打开的文件(设备对应于设备文件),其实系统中的每个打开的文件在内核空间都有 * 一个相应的struct file结构体,它由内核在打开文件时创建,并传递给在文件上进行操作的任何函数,直至文 * 件被关闭。如果文件被关闭,内核就会释放相应的数据结构 */ struct file { union { struct llist_node fu_llist; struct rcu_head fu_rcuhead; } f_u; struct path f_path; struct inode *f_inode; /* cached value */ const struct file_operations *f_op; /* 与文件相关的各种操作 */ /* * Protects f_ep_links, f_flags. * Must not be taken from IRQ context. */ spinlock_t f_lock; atomic_long_t f_count; unsigned int f_flags; /* 文件标志,如 O_RDONLY , O_NONBLOCK 以及 O_SYNC */ fmode_t f_mode; /* 此文件模式通过 FMODE_READ , FMODE_WRITE 识别了文件为可读的,可写的,或者是二者 */ struct mutex f_pos_lock; loff_t f_pos; /* 当前读写文件的位置 */ struct fown_struct f_owner; const struct cred *f_cred; struct file_ra_state f_ra; u64 f_version; #ifdef CONFIG_SECURITY void *f_security; #endif /* needed for tty driver, and maybe others */ void *private_data; /* 在驱动调用open方法之前,open系统调用设置此指针为NULL值。你可以很自由的将其做为你自己需要的一些数据域或者不管它 */ #ifdef CONFIG_EPOLL /* Used by fs/eventpoll.c to link all the hooks to this file */ struct list_head f_ep_links; struct list_head f_tfile_llink; #endif /* #ifdef CONFIG_EPOLL */ struct address_space *f_mapping; } __attribute__((aligned(4))); /* lest something weird decides that 2 is OK */
步骤3: 编写字符设备驱动模块加载
步骤3.1:创建并注册设备号
- register_chrdev
/**
* register_chrdev() - create and register a cdev occupying a range of minors
* @major: major device number or 0 for dynamic allocation
* @name: name of this range of devices
* @fops: file operations associated with this devices
*
* If @major == 0 this functions will dynamically allocate a major and return
* its number.
*
* If @major > 0 this function will attempt to reserve a device with the given
* major number and will return zero on success.
*
* Returns a -ve errno on failure.
*
* The name of this device has nothing to do with the name of the device in
* /dev. It only helps to keep track of the different owners of devices. If
* your module name has only one type of devices it's ok to use e.g. the name
* of the module here.
*/
static inline int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)
/**
* unregister_chrdev - unregister and destroy a cdev
* @major: major device number
* @name: name of this range of devices
*
* Unregister and destroy the cdev occupying the region described by
* @major, @baseminor and @count. This function undoes what
* register_chrdev() did.
*/
static inline void unregister_chrdev(unsigned int major, const char *name)- register_chrdev_region/alloc_chrdev_region + cdev
/**
* register_chrdev_region() - register a range of device numbers
* @from: the first in the desired range of device numbers; must include
* the major number.
* @count: the number of consecutive device numbers required
* @name: the name of the device or driver.
*
* Return value is zero on success, a negative error code on failure.
*/
int register_chrdev_region(dev_t from, unsigned count, const char *name)
/**
* alloc_chrdev_region() - register a range of char device numbers
* @dev: output parameter for first assigned number
* @baseminor: first of the requested range of minor numbers
* @count: the number of minor numbers required
* @name: the name of the associated device or driver
*
* Allocates a range of char device numbers. The major number will be
* chosen dynamically, and returned (along with the first minor number)
* in @dev. Returns zero or a negative error code.
*/
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
/**
* unregister_chrdev_region() - return a range of device numbers
* @from: the first in the range of numbers to unregister
* @count: the number of device numbers to unregister
*
* This function will unregister a range of @count device numbers,
* starting with @from. The caller should normally be the one who
* allocated those numbers in the first place...
*/
void unregister_chrdev_region(dev_t from, unsigned count)
/**
* cdev_alloc() - allocate a cdev structure
*
* Allocates and returns a cdev structure, or NULL on failure.
*/
struct cdev *cdev_alloc(void)
/**
* cdev_init() - initialize a cdev structure
* @cdev: the structure to initialize
* @fops: the file_operations for this device
*
* Initializes @cdev, remembering @fops, making it ready to add to the
* system with cdev_add().
*/
void cdev_init(struct cdev *cdev, const struct file_operations *fops)
/**
* cdev_add() - add a char device to the system
* @p: the cdev structure for the device
* @dev: the first device number for which this device is responsible
* @count: the number of consecutive minor numbers corresponding to this
* device
*
* cdev_add() adds the device represented by @p to the system, making it
* live immediately. A negative error code is returned on failure.
*/
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
/**
* cdev_del() - remove a cdev from the system
* @p: the cdev structure to be removed
*
* cdev_del() removes @p from the system, possibly freeing the structure
* itself.
*/
void cdev_del(struct cdev *p)步骤3.2:创建一个class类型的对象
/* This is a #define to keep the compiler from merging different
* instances of the __key variable */
#define class_create(owner, name) \
({ \
static struct lock_class_key __key; \
__class_create(owner, name, &__key); \
})
/**
* class_create - create a struct class structure
* @owner: pointer to the module that is to "own" this struct class
* @name: pointer to a string for the name of this class.
* @key: the lock_class_key for this class; used by mutex lock debugging
*
* This is used to create a struct class pointer that can then be used
* in calls to device_create().
*
* Returns &struct class pointer on success, or ERR_PTR() on error.
*
* Note, the pointer created here is to be destroyed when finished by
* making a call to class_destroy().
*/
struct class *__class_create(struct module *owner, const char *name, struct lock_class_key *key)
/**
* class_destroy - destroys a struct class structure
* @cls: pointer to the struct class that is to be destroyed
*
* Note, the pointer to be destroyed must have been created with a call
* to class_create().
*/
void class_destroy(struct class *cls)步骤3.3:生成设备节点并导出到用户空间
/**
* device_create- 创建设备
* @class: 该设备依附的类
* @parent: 父设备
* @devt: 设备号(此处的设备号为主次设备号)
* @drvdata:私有数据
* @fmt:设备名
* return:创建的设备指针
*/
struct device *device_create(struct class *class, struct device *parent, dev_t devt, void *drvdata, const char *fmt, ...)
/**
* device_create- 销毁设备
* @class: 该设备依附的类
* @devt: 设备号(此处的设备号为主次设备号)
*/
void device_destroy(struct class *class, dev_t devt)步骤4: 编写字符设备驱动模块卸载
查看步骤3
步骤5:指定驱动出入口
/**
* module_init() - driver initialization entry point
* @x: function to be run at kernel boot time or module insertion
*
* module_init() will either be called during do_initcalls() (if
* builtin) or at module insertion time (if a module). There can only
* be one per module.
*/
#define module_init(x) __initcall(x);
/**
* module_exit() - driver exit entry point
* @x: function to be run when driver is removed
*
* module_exit() will wrap the driver clean-up code
* with cleanup_module() when used with rmmod when
* the driver is a module. If the driver is statically
* compiled into the kernel, module_exit() has no effect.
* There can only be one per module.
*/
#define module_exit(x) __exitcall(x);步骤6:完善驱动信息
/*
* The following license idents are currently accepted as indicating free
* software modules
*
* "GPL" [GNU Public License v2 or later]
* "GPL v2" [GNU Public License v2]
* "GPL and additional rights" [GNU Public License v2 rights and more]
* "Dual BSD/GPL" [GNU Public License v2
* or BSD license choice]
* "Dual MIT/GPL" [GNU Public License v2
* or MIT license choice]
* "Dual MPL/GPL" [GNU Public License v2
* or Mozilla license choice]
*
* The following other idents are available
*
* "Proprietary" [Non free products]
*
* There are dual licensed components, but when running with Linux it is the
* GPL that is relevant so this is a non issue. Similarly LGPL linked with GPL
* is a GPL combined work.
*
* This exists for several reasons
* 1. So modinfo can show license info for users wanting to vet their setup
* is free
* 2. So the community can ignore bug reports including proprietary modules
* 3. So vendors can do likewise based on their own policies
*/
#define MODULE_LICENSE(_license) MODULE_INFO(license, _license)
/*
* Author(s), use "Name <email>" or just "Name", for multiple
* authors use multiple MODULE_AUTHOR() statements/lines.
*/
#define MODULE_AUTHOR(_author) MODULE_INFO(author, _author)
/* What your module does. */
#define MODULE_DESCRIPTION(_description) MODULE_INFO(description, _description)# 补充知识
1. 加载和卸载驱动模块
- 加载模块
驱动编译完成以后扩展名为.ko,有两种命令可以加载驱动模块: insmod和 modprobe,其中insmod 命令不能解决模块的依赖关系,比如 drv.ko 依赖 first.ko 这个模块,就必须先使用insmod 命令加载 first.ko 这个模块,然后再加载 drv.ko 这个模块。但是 modprobe 就不会存在这个问题, modprobe 会分析模块的依赖关系,然后会将所有的依赖模块都加载到内核中,因此modprobe 命令相比 insmod 要智能一些。 modprobe 命令主要智能在提供了模块的依赖性分析、错误检查、错误报告等功能,modprobe 命令默认会去/lib/modules/<kernel-version>目录中查找模块,比如本书使用的 Linux kernel 的版本号为 4.1.15,因此 modprobe 命令默认会到/lib/modules/4.1.15 这个目录中查找相应的驱动模块,一般自己制作的根文件系统中是不会有这个目录的,所以需要自己手动创建
insmod drv.ko
modprobe drv.ko
- 卸载模块
驱动模块的卸载使用命令“rmmod”即可,也可以使用“modprobe -r”命令卸载驱动
rmmod drv.ko
modprobe -r drv.ko
- 查看模块
输入“lsmod”命令即可查看当前系统中存在的模块
2. 查看驱动设备
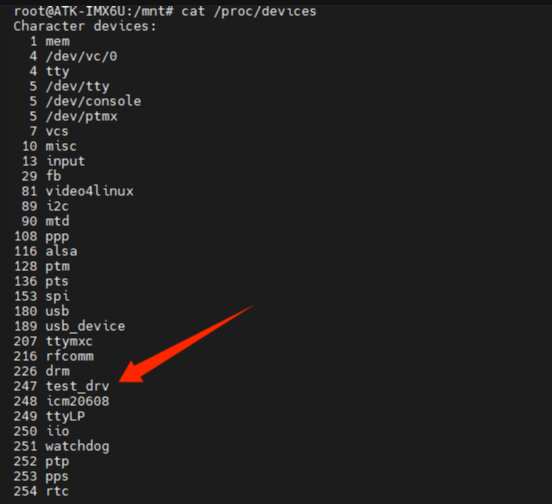
- 使用 cat /proc/devices 可以查看当前已经被使用掉的设备号
- 使用 ls /sys/class/ 查看类

- 使用 ls /sys/class/test_class/ -l 查看设备

3. 查看日志信息
- printk
printk 运行在内核态。在内核中想要向控制台输出或显示一些内容,必须使用printk 这个函数。不同之处在于, printk 可以根据日志级别对消息进行分类,一共有 8 个消息级别,这 8 个消息级别定义在文件 include/linux/kern_levels.h 里面,定义如下:
#define KERN_SOH "\001"
#define KERN_EMERG KERN_SOH "0" /* 紧急事件,一般是内核崩溃 */
#define KERN_ALERT KERN_SOH "1" /* 必须立即采取行动 */
#define KERN_CRIT KERN_SOH "2" /* 临界条件,比如严重的软件或硬件错误*/
#define KERN_ERR KERN_SOH "3" /* 错误状态,一般设备驱动程序中使用
KERN_ERR 报告硬件错误 */
#define KERN_WARNING KERN_SOH "4" /* 警告信息,不会对系统造成严重影响 */
#define KERN_NOTICE KERN_SOH "5" /* 有必要进行提示的一些信息 */
#define KERN_INFO KERN_SOH "6" /* 提示性的信息 */
#define KERN_DEBUG KERN_SOH "7" /* 调试信息 */一共定义了 8 个级别,其中 0 的优先级最高, 7 的优先级最低。如果要设置消息级别,参考如下示例:printk(KERN_EMERG "gsmi: Log Shutdown Reason\n");用 printk 的 时 候 不 显 式 的 设 置 消 息 级 别 , 那 么 printk 将 会 采 用 默 认 级 别MESSAGE_LOGLEVEL_DEFAULT, MESSAGE_LOGLEVEL_DEFAULT 默认为 4
printk等级
使用 # cat /proc/sys/kernel/printk 指令查看printk等级
![]()
四个数字分表代表:DEFAULT_CONSOLE_LOGLEVEL(控制台输出等级)、DEFAULT_MESSAGE_LOGLEVEL(默认消息等级)、MINIMUM_CONSOLE_LOGLEVEL(最低输出等级)、DEFAULT_CONSOLE_LOGLEVEL(默认控制台输出等级)
当 printk() 中的消息日志级别小于当前控制台日志级别(CONSOLE_LOGLEVEL_DEFAULT)时,printk 的信息就会在控制台上显示,如果我们用 printk 的 时 候 不 显 式 的 设 置 消 息 级 别,即printk使用MESSAGE_LOGLEVEL_DEFAULT(级别为4),此时当前控制台日志级别为CONSOLE_LOGLEVEL_DEFAULT(级别为7),所示直接使用 printk 输出的信息是可以显示在控制台上的。
- 查看日志
第一种是使用dmesg命令打印。第二种是通过cat /proc/kmsg来打印