文章目录
- 一、硬件电路
-
- 设备地址
- 二、使用步骤
- 字节写:
-
- 页写入:
- 任意写:
- 任意读:
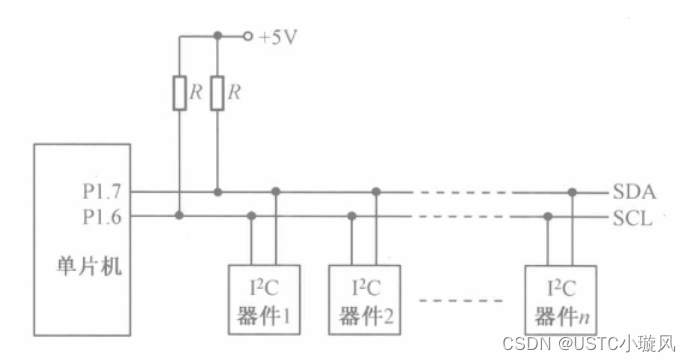
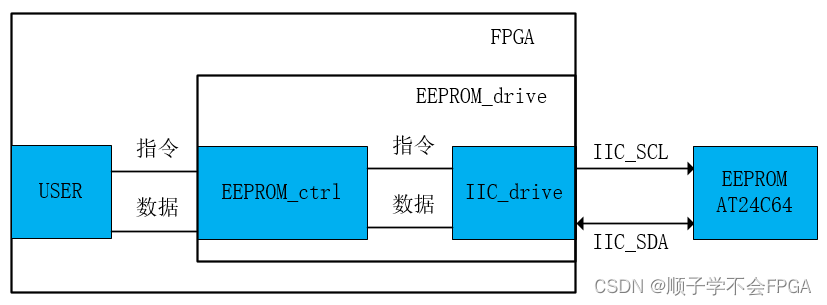
一、硬件电路
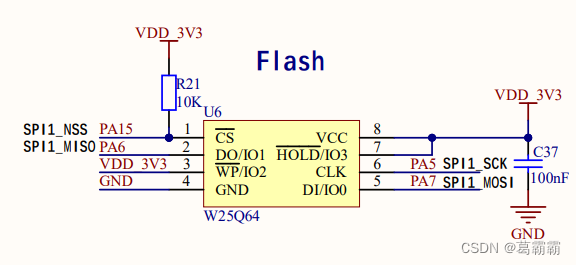
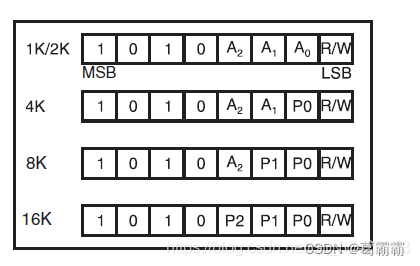
设备地址
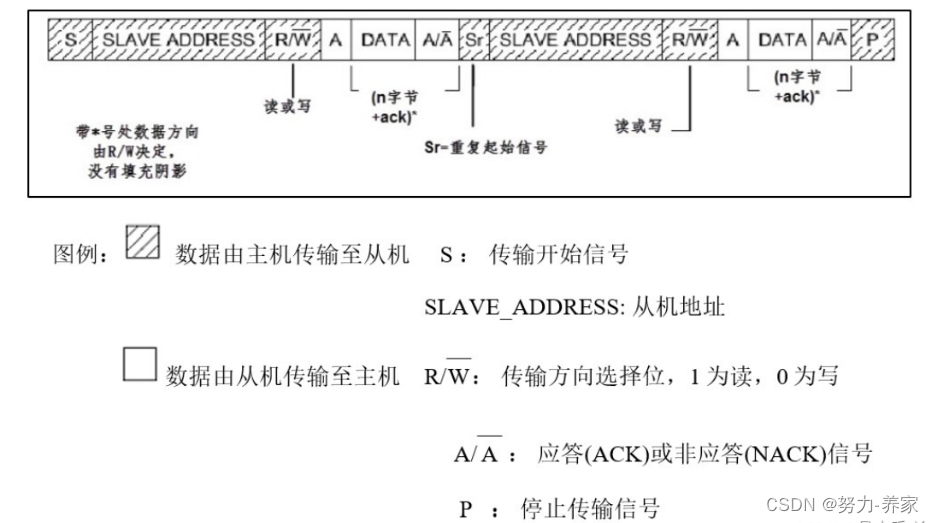
设备需要一个8位的设备地址字,后面跟着一个启动条件,以使芯片能够进行读或写操作
设备地址字由一个强制的1,0序列的前四个最有效的位,如所示。这是所有EEPROM设备的共同特点。
接下来的3位是1K/2K EEPROM的A2、A1和AO设备地址位。这3位必须与相应的硬接线输入引脚相比较。
最后一位为0表示写。最后一位为1表示读!
因此本设备的设备地址为0x50
二、使用步骤
static int ATC02I2CWrite(uint8_t *pdata,uint16_t length){
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&hi2c1, (0x50<<1), pdata, length, 0xFF);
if(status != ESUCCESS){
return -EIO;
}
return ESUCCESS;
}
static int ATC02I2CRead(uint8_t *pdata,uint16_t length){
HAL_StatusTypeDef status = HAL_I2C_Master_Receive(&hi2c1, (0x50<<1), pdata, length, 0xFF);
if(status != ESUCCESS){
return -EIO;
}
return ESUCCESS;
}
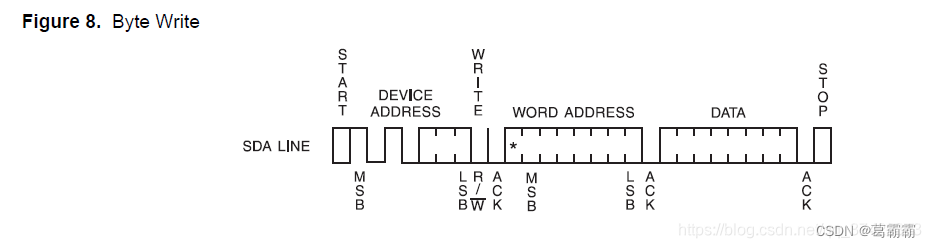
字节写:
写操作需要在设备地址字和确认之后有一个8位的数据字地址。一旦收到这个地址,EEPROM将再次响应一个零,然后在第一个8位数据字时钟。接收到8位数据字后,EEPROM将输出一个零。主机必须用一个停止条件终止写序列。此时,EEPROM进入一个内部计时的写周期,到非易失性存储器。在这个写周期中,所有输入都被禁用,EEPROM直到写完成才会响应。
static int ByteWrite(uint8_t addr,uint8_t pdata){
uint8_t data[2] = {addr,pdata};
int ret = ATC02I2CWrite(data,2);
if(ret != ESUCCESS){
return -EIO;
}
osDelay(5);
return ESUCCESS;
}
页写入:
1K/2K EEPROM能够进行8字节的页写入,4K、8K和16K设备能够进行16字节的页写入。
页写的初始化过程与字节写的初始化过程相同。但是微控制器在第一个数据字被写入后并没有发送一个停止条件。
相反,在EEPROM承认接收到第一个数据字之后。该微控制器可以传输多达7 (1K/2K)或15 (4K, 8K, 16K)更多的数据字。EEPROM在接收到每个数据字后将以一个零响应。微控制器必须用一个停止条件终止页写序列。
当内部生成的字到达页面边界时,下面的字节被放置在同一页面的开头。
如果有超过8个(1K/2K)或16个(4K, 8K, 16K)数据字传输到EEPROM,数据字地址将“翻转”,先前的数据将被覆盖。

static int PageWrite(uint8_t addr,uint8_t *pdata,uint8_t length){
uint8_t data[9] = {addr};
memcpy(&data[1],pdata,length);
int ret = ATC02I2CWrite(data,length+1);
if(ret != ESUCCESS){
return -EIO;
}
return ESUCCESS;
}
任意写:
static int ATC02Write(uint8_t addr,uint8_t *pdata,uint16_t length){
uint8_t pages = (length + addr%ATC02_PAGE_SIZE)/ATC02_PAGE_SIZE+1;
int ret = 0;
if(pages == 1){
ret = PageWrite(addr,pdata,length);
if(ret != ESUCCESS){
return -EIO;
}
}else{
uint8_t firstWriteByte = ATC02_PAGE_SIZE - addr%ATC02_PAGE_SIZE;
if(firstWriteByte != 0){
ret = PageWrite(addr,pdata,firstWriteByte);
if(ret != ESUCCESS){
return -EIO;
}
addr = addr + firstWriteByte;
pdata = pdata + firstWriteByte;
length = length - firstWriteByte;
}
uint8_t length1 = 0;
while(length){
if(length > ATC02_PAGE_SIZE){
length1 = 8;
}else{
length1 = length;
}
ret = PageWrite(addr,pdata,length1);
if(ret != ESUCCESS){
return -EIO;
}
addr = addr + length1;
pdata = pdata + length1;
length = length - length1;
}
}
return ESUCCESS;
}
任意读:
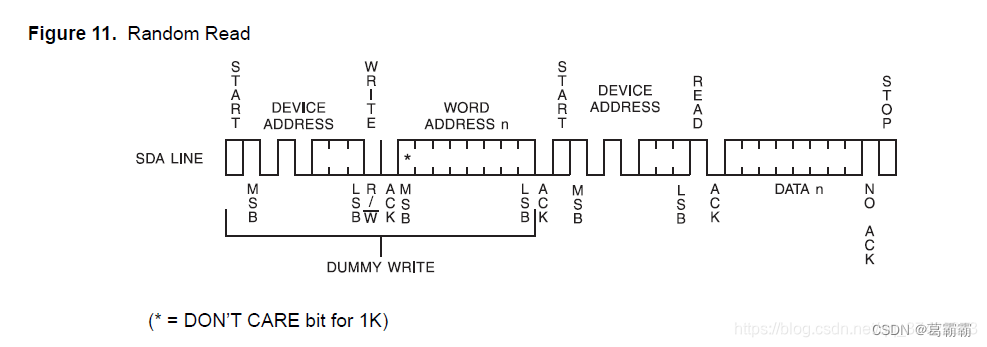
static int ATC02Read(uint8_t addr,uint8_t *pdata,uint16_t length){
int ret = ATC02I2CWrite(&addr,1);
if(ret != ESUCCESS){
return -EIO;
}
ret = ATC02I2CRead(pdata,length);
if(ret != ESUCCESS){
return -EIO;
}
return ESUCCESS;
}