| Picking up Speed: Continuous-Time Lidar-Only Odometry Using Doppler Velocity Measurements |
Yuchen Wu, David Juny Yoon, Keenan Burnett, Sören Kammel, Yi Chen, Heethesh Vhavle, Timothy Barfoot |
University of Toronto,Aeva Inc,Aeva,Aeva, Inc |
SLAM 1 |
| Stein ICP for Uncertainty Estimation in Point Cloud Matching |
Fahira Afzal Maken, Fabio Ramos, Lionel Ott |
Data, CSIRO,University of Sydney, NVIDIA,ETH Zurich |
SLAM 1 |
| Direct and Sparse Deformable Tracking |
Jose Lamarca, Juan Jose Gomez Rodriguez, Juan D. Tardos, Jose M M Montiel |
Apple Inc.,Universidad de Zaragoza,I,A. Universidad de Zaragoza |
SLAM 1 |
| ASRO-DIO: Active Subspace Random Optimization Based Depth Inertial Odometry |
Jiazhao Zhang, Yijie Tang, He Wang, Kai Xu |
National University of Defense Technology,Peking University |
SLAM 1 |
| Discrete-Continuous Smoothing and Mapping |
Kevin Doherty, Ziqi Lu, Kurran Singh, John Leonard |
Massachusetts Institute of Technology,MIT |
SLAM 1 |
| Anderson Acceleration for On-Manifold Iterated Error State Kalman Filters |
Xiang Gao, Tao Xiao, Chunge Bai, Dezhao Zhang, Fang Zhang |
idriverplus.com,Beijing Idriverplus Technology Co. Ltd.,Tsinghua University,Beijing Idriverplus Technology Co., Ltd. |
SLAM 1 |
| Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features |
Kohei Honda, Kenji Koide, Masashi Yokozuka, Shuji Oishi, Atsuhiko Banno |
Nagoya University Graduate School,National Institute of Advanced Industrial Science and Technology,Nat. Inst. of Advanced Industrial Science and Technology,National Institute of Advanced Industrial Science and Technology (AIST),National Instisute of Advanced Industrial Science and Technology |
SLAM 1 |
| BoW3D: Bag of Words for Real-Time Loop Closing in 3D LiDAR SLAM |
Yunge Cui, Xieyuanli Chen, Yinlong Zhang, Jiahua Dong, Qingxiao Wu, Feng Zhu |
Shenyang Institute of Automation Chinese Academy of Sciences,National University of Defense Technology,Shenyang Institute of Automation, Chinese Academy of Sciences,Shenyang Institute of Automation,Chinese Academy of Scien |
SLAM 1 |
| Gaussian Mixture Midway-Merge for Object SLAM with Pose Ambiguity |
Jae Hyung Jung, Chan Gook Park |
Seoul National University |
SLAM 1 |
| Design and Characterization of a 3D-Printed Pneumatically-Driven Bistable Valve with Tunable Characteristics |
Sihan Wang, Liang He, Perla Maiolino |
University of Oxford |
Soft Robot Applications |
| Design of Fully Controllable and Continuous Programmable Surface Based on Machine Learning |
Jue Wang, Jiaqi Suo, Alex Chortos |
Purdue University,Gensler Baltimore,Purdue |
Soft Robot Applications |
| On the Use of Magnets to Robustify the Motion Control of Soft Hands |
Sara Marullo, Gionata Salvietti, Domenico Prattichizzo |
University of Siena |
Soft Robot Applications |
| Kinegami: Algorithmic Design of Compliant Kinematic Chains from Tubular Origami |
Wei-Hsi Chen, Woohyeok Yang, Lucien Peach, Daniel Koditschek, Cynthia Sung |
University of Pennsylvania |
Soft Robot Applications |
| Entrainment During Human Locomotion Using a Lightweight Soft Robotic Hip Exosuit (SR-HExo) |
Lily C. Baye-wallace, Carly Thalman, Hyunglae Lee |
Southwest Research Institute; Arizona State University,Arizona State University |
Soft Robot Applications |
| SOPHIE: SOft and Flexible Aerial Vehicle for PHysical Interaction with the Environment |
Fernando Ruiz Vincueria, Begoña C. Arrue, Aníbal Ollero |
UNIVERSIDAD DE SEVILLA,Universidad de Sevilla,University of Seville |
Soft Robot Applications |
| A Tensegrity-Based Inchworm-Like Robot for Crawling in Pipes with Varying Diameters |
Yixiang Liu, Xiaolin Dai, Zhe Wang, Qing Bi, Rui Song, Jie Zhao, Yibin Li |
Shandong University,Volvo Construction Equipment Technology (China) Co., Ltd,shandong university,Harbin Institute of Technology |
Soft Robot Applications |
| Untethered Robotic Millipede Driven by Low-Pressure Microfluidic Actuators for Multi-Terrain Exploration |
Qi Shao, Xuguang Dong, Zhonghan Lin, Chao Tang, Hao Sun, Xin-Jun Liu, Huichan Zhao |
Tsinghua University |
Soft Robot Applications |
| FEA-Based Soft Robotic Modeling: Simulating a Soft-Actuator in SOFA |
Pasquale Ferrentino, Ellen Roels, Joost Brancart, Seppe Terryn, Guy Van Assche, Bram Vanderborght |
Vrije Universiteit Brussels,Vrije Universiteit Brussel,Vrije Universiteit Brussel (VUB) |
Soft Robot Applications |
| Inflated Bendable Eversion Cantilever Mechanism with Inner Skeleton for Increased Stiffness |
Tomoya Takahashi, Masahiro Watanabe, Kazuki Abe, Kenjiro Tadakuma, Naoto Saiki, Masashi Konyo, Satoshi Tadokoro |
Tohoku University |
Soft Robot Applications |
| Energy-Based Design Optimization of a Miniature Wave-Like Robot Inside Curved Compliant Tubes |
Rotem Katz, Dan Shachaf, David Zarrouk |
Ben Gurion University of the Negev,BGU,Ben Gurion University |
Design of Mechanisms |
| A Palm-Sized Omnidirectional Mobile Robot Driven by 2-DOF Torus Wheels |
Yunosuke Sato, Ayato Kanada, Tomoaki Mashimo |
Toyohashi University of Technology,Kyushu University,Okayama University |
Design of Mechanisms |
| Flipper-Style Locomotion through Strong Expanding Modular Robots |
Lillian Chin, Max Burns, Gregory Xie, Daniela Rus |
Massachusetts Institute of Technology,MIT |
Design of Mechanisms |
| Simplified Configuration Design of Anthropomorphic Hand Imitating Specific Human Hand Grasps |
Xinyang Tian, Qiang Zhan, Yin Zhang, Junyi Zou, Lingxiao Jiang, Qinhuan Xu |
Beihang university,Beihang University |
Design of Mechanisms |
| Meta Reinforcement Learning for Optimal Design of Legged Robots |
Alvaro Belmonte-baeza, Joonho Lee, Giorgio Valsecchi, Marco Hutter |
University of Alicante,ETH Zurich Robotic Systems Laboratory,Robotic System Lab, ETH,ETH Zurich |
Design of Mechanisms |
| Advanced 2-DOF Counterbalance Mechanism Based on Gear Units and Springs to Minimize Required Torques of Robot Arm |
Hwi-Su Kim, Jongwoo Park, Myeongsu Bae, Dongil Park, Chanhun Park, Hyunmin Do, Taeyong Choi, Doo-hyeong Kim, Jinho Kyung |
Korea Institute of Machinery & Materials,Korea Institue of Machinery & Materials,Dyence tech,Korea Institute of Machinery and Materials (KIMM),KIMM,Korea Institute of Machinery and Materials,Korea Institute of Machinery & Materials (KIMM) |
Design of Mechanisms |
| Permanent-Magnetically Amplified Robotic Gripper with Less Clamping Width Influence on Compensation Realized by a Stepless Width Adjustment Mechanism |
Tori Shimizu, Kenjiro Tadakuma, Masahiro Watanabe, Kazuki Abe, Masashi Konyo, Satoshi Tadokoro |
Tohoku University |
Design of Mechanisms |
| Design of a New Bio-Inspired Dual-Axis Compliant Micromanipulator with Millimeter Strokes |
Zekui Lyu, Qingsong Xu |
University of Macau |
Design of Mechanisms |
| Optimal Elastic Wing for Flapping-Wing Robots through Passive Morphing |
Cristina Ruiz Paez, Jose Angel Acosta, Aníbal Ollero |
University of Seville |
Design of Mechanisms |
| Robust Multi-Robot Trajectory Optimization Using Alternating Direction Method of Multiplier |
Ruiqi Ni, Zherong Pan, Xifeng Gao |
Florida State University,Tencent America |
Planning |
| Autonomous Exploration in a Cluttered Environment for a Mobile Robot with 2D-Map Segmentation and Object Detection |
Hyung Seok Kim, Hyeongjin Kim, Seon-il Lee, Hyeonbeom Lee |
Kyungpook National University |
Planning |
| Distributionally Safe Path Planning: Wasserstein Safe RRT |
Paul Lathrop, Beth Boardman, Sonia Martinez |
University of California, San Diego,Los Alamos National Laboratory,UC San Diego |
Planning |
| Sim2Real Learning of Obstacle Avoidance for Robotic Manipulators in Uncertain Environments |
Tan Zhang, Kefang Zhang, Jiatao Lin, Wing-yue Geoffrey Louie, Hui Huang |
Shenzhen Techonology University,Shenzhen University,Oakland University |
Planning |
| Bidirectional Sampling-Based Motion Planning without Two-Point Boundary Value Solution |
Sharan Nayak, Michael W. Otte |
University of Maryland, College Park,University of Maryland |
Planning |
| Long-Horizon Multi-Robot Rearrangement Planning for Construction Assembly |
Valentin Hartmann, Andreas Orthey, Danny Driess, Ozgur S. Oguz, Marc Toussaint |
University of Stuttgart,TU Berlin,Bilkent University |
Planning |
| A Reachability-Based Spatio-Temporal Sampling Strategy for Kinodynamic Motion Planning |
Yongxing Tang, Zhanxia Zhu, Hongwen Zhang |
Northwestern Polytechnical University,Zhejiang Lab |
Planning |
| Efficient Speed Planning for Autonomous Driving in Dynamic Environment with Interaction Point Model |
Yingbing Chen, Ren Xin, Jie Cheng, Qingwen Zhang, Xiaodong Mei, Ming Liu, Lujia Wang |
The Hongkokng University of Science and Technology,the Hong Kong University of Science and Technology,Hong Kong University of Science and Technology,KTH Royal Institute of Technology,HKUST,The Hong Kong University of Technology |
Planning |
| Efficient Anytime CLF Reactive Planning System for a Bipedal Robot on Undulating Terrain |
Bruce Jk Huang, J.W Grizzle |
University of Michigan |
Planning |
| A Framework to Co-Optimize Robot Exploration and Task Planning in Unknown Environments |
Yuanfan Xu, Zhaoliang Zhang, Yu Jincheng, Yuan Shen, Yu Wang |
Tsinghua University |
Planning |
| Binarized P-Network: Deep Reinforcement Learning of Robot Control from Raw Images on FPGA |
Yuki Kadokawa, Yoshihisa Tsurumine, Takamitsu Matsubara |
Nara Institute of Science and Technology |
Reinforcement Learning |
| Automating Reinforcement Learning with Example-Based Resets |
Jigang Kim, J. Hyeon Park, Daesol Cho, H. Jin Kim |
Seoul National University |
Reinforcement Learning |
| Improving the Robustness of Reinforcement Learning Policies with L1 Adaptive Control |
Yikun Cheng, Pan Zhao, Fanxin Wang, Daniel Block, Naira Hovakimyan |
University of Illinois at Urbana-Champaign,University of Illinois Urbana-Champaign,University of Illinois |
Reinforcement Learning |
| Developing Cooperative Policies for Multi-Stage Reinforcement Learning Tasks |
Jordan Erskine, Christopher Lehnert |
Queensland University of Technology |
Reinforcement Learning |
| Learning Performance Graphs from Demonstrations Via Task-Based Evaluations |
Aniruddh Gopinath Puranic, Jyotirmoy Deshmukh, Stefanos Nikolaidis |
University of Southern California,UNIVERSITY OF SOUTHERN CALIFORNIA |
Reinforcement Learning |
| Tumbling Robot Control Using Reinforcement Learning |
Andrew Schwartzwald, Matthew Tlachac, Luis Guzman, Athanasios Bacharis, Nikos Papanikolopoulos |
CSE, UMN,CSE, University of Minnesota,University of Minnesota |
Reinforcement Learning |
| Guided Reinforcement Learning – a Review and Evaluation for Efficient and Effective Real-World Robotics |
Julian Eßer, Nicolas Bach, Christian Jestel, Oliver Urbann, Sören Kerner |
Fraunhofer IML |
Reinforcement Learning |
| Robust Adaptive Ensemble Adversary Reinforcement Learning |
Peng Zhai, Taixian Hou, Xiaopeng Ji, Zhiyan Dong, Lihua Zhang |
Fudan University,FuDan University,Zhejiang University |
Reinforcement Learning |
| GIN: Graph-Based Interaction-Aware Constraint Policy Optimization for Autonomous Driving |
Se-Wook Yoo, Chan Kim, Jinwoo Choi, Seong-woo Kim, Seung-Woo Seo |
Seoul National University |
Reinforcement Learning |
| Adaptively Calibrated Critic Estimates for Deep Reinforcement Learning |
Nicolai Dorka, Tim Welschehold, Joschka Boedecker, Wolfram Burgard |
University of Freiburg,Albert-Ludwigs-Universität Freiburg,University of Technology Nuremberg |
Reinforcement Learning |
| An Investigation on the Effect of Actuation Pattern on the Power Consumption of Legged Robots for Extraterrestrial Exploration |
Yuan Hu, Weizhong Guo, Rongfu Lin |
University of Shanghai for Science and Technology,Shanghai Jiao Tong University,ShangHai JiaoTong university |
Marine and Field Robotics |
| Intent Inference-Based Ship Collision Avoidance in Encounters with Rule-Violating Vessels |
Yonghoon Cho, Jonghwi Kim, Jinwhan Kim |
Agency for Defense Development,KAIST |
Marine and Field Robotics |
| Nezha-Mini: Design and Locomotion of a Miniature Low-Cost Hybrid Aerial Underwater Vehicle |
Yuanbo Bi, Yufei Jin, Chenxin Lyu, Zheng Zeng, Lian Lian |
Shanghai jiao tong University,Shanghai Jiao Tong University,Shanghai Jiaotong University |
Marine and Field Robotics |
| CPG-Based Motion Planning of Hybrid Underwater Hexapod Robot for Wall Climbing and Transition |
Feiyu Ma, Weisheng Yan, Lepeng Chen, Rongxin Cui |
Northwestern Polytechnical University |
Marine and Field Robotics |
| Improving Self-Consistency in Underwater Mapping through Laser-Based Loop Closure |
Thomas Hitchcox, James Richard Forbes |
McGill University |
Marine and Field Robotics |
| Passive Inverted Ultra-Short Baseline Positioning for a Disc-Shaped Autonomous Underwater Vehicle: Design and Field Experiments |
Yingqiang Wang, Ruoyu Hu, S. H. Huang, Zhikun Wang, Peizhou Du, Wencheng Yang, Ying Chen |
Zhejiang University,Zhejiang Univ.,China |
Marine and Field Robotics |
| The Robustness of Tether Friction in Non-Idealized Terrains |
Justin Page, Laura Treers, Steven Jens Jorgensen, Ronald Fearing, Hannah Stuart |
UC Berkeley Mechanical Engineering,University of California Berkeley,Apptronik,University of California at Berkeley,UC Berkeley |
Marine and Field Robotics |
| Reconfigurable Inflated Soft Arms |
Nam Gyun Kim, Jee-Hwan Ryu |
Korea Advanced Institute of Science and Technology |
Soft Robots I |
| A Soft Hybrid-Actuated Continuum Robot Based on Dual Origami Structures |
Jian Tao, Qiqiang Hu, Tianzhi Luo, Erbao Dong |
University of Science and Technology of China,City University of Hong Kong |
Soft Robots I |
| Direct and Inverse Modeling of Soft Robots by Learning a Condensed FEM Model |
Etienne Ménager, Tanguy Navez, Olivier Goury, Christian Duriez |
Univ. Lille, Inria, CNRS, Centrale Lille, UMR , CRIStAL,University of Lille - INRIA,Inria - Lille Nord Europe,INRIA |
Soft Robots I |
| Limit Cycle Generation with Pneumatically Driven Physical Reservoir Computing |
Hiroaki Shinkawa, Toshihiro Kawase, Tetsuro Miyazaki, Takahiro Kanno, Maina Sogabe, Kenji Kawashima |
The University of Tokyo,Tokyo Denki University,Riverfield Inc.,the University of Tokyo |
Soft Robots I |
| Toward Zero-Shot Sim-To-Real Transfer Learning for Pneumatic Soft Robot 3D Proprioception Sensing |
Uksang Yoo, Hanwen Zhao, Alvaro Altamirano, Wenzhen Yuan, Chen Feng |
Carnegie Mellon University,New York University |
Soft Robots I |
| Cross-Domain Transfer Learning and State Inference for Soft Robots Via a Semi-Supervised Sequential Variational Bayes Framework |
Shageenderan Sapai, Junn Yong Loo, Ze Yang Ding, Chee Pin Tan, Raphael Phan, Vishnu Monn Baskaran, Surya G. Nurzaman |
Monash University,Monash Malaysia,Monash University Malaysia |
Soft Robots I |
| Image-Based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots Via Differentiable Rendering |
Jingpei Lu, Fei Liu, Cedric Girerd, Michael Yip |
University of California San Diego,UCSD,University of California, San Diego |
Soft Robots I |
| Discrete-Time Model Based Control of Soft Manipulator with FBG Sensing |
Enrico Franco, Ayhan Aktas, Shen Treratanakulchai, Arnau Garriga-casanovas, Abdulhamit Donder, Ferdinando Rodriguez Y Baena |
Imperial College London,Imperial College,Imperial College, London, UK |
Soft Robots I |
| A Soft Robot with Three Dimensional Shape Sensing and Contact Recognition Multi-Modal Sensing Via Tunable Soft Optical Sensors |
Max Mccandless, Frank Juliá Wise, Sheila Russo |
Boston University |
Soft and Flexible Sensors |
| A Flexible 3D Force Sensor with Tunable Sensitivity |
James J. Davies, Mai Thanh Thai, Trung Thien Hoang, Nguyen Chi Cong, Phuoc Thien Phan, Kefan Zhu, Dang Bao Nhi Tran, Van Ho, Hung La, Q P Ha, Nigel Lovell, Thanh Nho Do |
University of New South Wales,UNSW Sydney,RMIT,Japan Advanced Institute of Science and Technology,University of Nevada at Reno,University of Technology Sydney |
Soft and Flexible Sensors |
| STEV: Stretchable Triboelectric E-Skin Enabled Proprioceptive Vibration Sensing for Soft Robot |
Zihan Wang, Kai-chong Lei, Tang Huaze, Shoujie Li, Yuan Dai, Wenbo Ding, Xiao-Ping (Steven) Zhang |
Tsinghua University,Tsinghua Shenzhen International Graduate School,Tencent,Ryerson University |
Soft and Flexible Sensors |
| Design and Development of a Hydrogel-Based Soft Sensor for Multi-Axis Force Control |
Yichen Cai, David Hardman, Fumiya Iida, Thomas George Thuruthel |
University of Cambridge,University College London |
Soft and Flexible Sensors |
| Design and Characterization of a Low Mechanical Loss, High-Resolution Wearable Strain Gauge |
Addison Liu, Oluwaseun Adelowo Araromi, Conor James Walsh, Robert Wood |
Harvard University,Harvard University Science and Engineering Building |
Soft and Flexible Sensors |
| Identifying Contact Distance Uncertainty in Whisker Sensing with Tapered, Flexible Whiskers |
Teresa Kent, Hannah Emnett, Mahnoush Babaei, Mitra Hartmann, Sarah Bergbreiter |
Carnegie Mellon University,Northwestern University,The University of Texas at Austin |
Soft and Flexible Sensors |
| Learning Decoupled Multi-Touch Force Estimation, Localization and Stretch for Soft Capacitive E-Skin |
Abu Bakar Dawood, Claudio Coppola, Kaspar Althoefer |
Queen Mary University of London |
Soft and Flexible Sensors |
| OptiGap: A Modular Optical Sensor System for Bend Localization |
Jr. Bupe, Cindy Harnett |
University of Louisville |
Soft and Flexible Sensors |
| A Silicone-Sponge-Based Variable-Stiffness Device |
Tianqi Yue, Tsam Lung You, Hemma Philamore, Hermes Gadelha, Jonathan Rossiter |
University of Bristol,Kyoto University,Department of engineering, University of Bristol, UK |
Actuation |
| Design and Control of a Tunable-Stiffness Coiled-Spring Actuator |
Shivangi Misra, Mason Mitchell, Rongqian Chen, Cynthia Sung |
University of Pennsylvania,Worcester Polytechnic Institute |
Actuation |
| Wirelessly-Controlled Untethered Piezoelectric Planar Soft Robot Capable of Bidirectional Crawling and Rotation |
Zhiwu Zheng, Hsin Cheng, Prakhar Kumar, Sigurd Wagner, Minjie Chen, Naveen Verma, James C. Sturm |
Princeton University |
Actuation |
| Origami Folding Enhances Modularity and Mechanical Efficiency of Soft Actuators |
Zheng Wang, Yazhou Song, Zhongkui Wang, Hongying Zhang |
National University of Singapore,Ritsumeikan University |
Actuation |
| Characterisation of Antagonistically Actuated, Stiffness-Controllable Joint-Link Units for Cobots |
Wenlong Gaozhang, Jialei Shi, Yue Li, Agostino Stilli, Helge Wurdemann |
University College London,Kings College London |
Actuation |
| A Fluidic Actuator with an Internal Stiffening Structure Inspired by Mammalian Erectile Tissue |
Jan Fras, Kaspar Althoefer |
Queen Mary University of London |
Actuation |
| On Tendon Driven Continuum Robots with Compressible Backbones |
Manu Srivastava, Ian Walker |
Clemson University |
Actuation |
| FourStr: When Multi-Sensor Fusion Meets Semi-Supervised Learning |
Bangquan Xie, Liang Yang, Zongming Yang, Ailin Wei, Xiaoxiong Weng, Bing Li |
South China University of Technology,Apple Inc,Clemson University,Clemson Univeristy |
Sensor Fusion I |
| Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time |
Vito Mengers, Aravind Battaje, Manuel Baum, Oliver Brock |
Technische Universität Berlin,TU Berlin |
Sensor Fusion I |
| Event-Based Real-Time Moving Object Detection Based on IMU Ego-Motion Compensation |
Chunhui Zhao, Yakun Li, Yang Lyu |
Northwestern Polytechnical University |
Sensor Fusion I |
| Estimating the Motion of Drawers from Sound |
Manuel Baum, Amelie Froessl, Aravind Battaje, Oliver Brock |
TU Berlin,Technische Universitaet Berlin,Technische Universität Berlin |
Sensor Fusion I |
| Sonicverse: A Multisensory Simulation Platform for Embodied Household Agents That See and Hear |
Ruohan Gao, Hao Li, Gokul Dharan, Zhuzhu Wang, Chengshu Li, Fei Xia, Silvio Savarese, Fei-Fei Li, Jiajun Wu |
Stanford University,Google Inc |
Sensor Fusion I |
| LAPTNet-FPN: Multi-Scale LiDAR-Aided Projective Transform Network for Real Time Semantic Grid Prediction |
Manuel Diaz Zapata, David Sierra Gonzalez, Ozgur Erkent, Christian Laugier, Jilles Dibangoye |
Inria Grenoble,Inria Grenoble Rhône-Alpes,Hacettepe University,INRIA,Univ Lyon |
Sensor Fusion I |
| Collision-Aware In-Hand 6D Object Pose Estimation Using Multiple Vision-Based Tactile Sensors |
Gabriele Mario Caddeo, Nicola Agostino Piga, Fabrizio Bottarel, Lorenzo Natale |
Istituto Italiano di Tecnologia |
Sensor Fusion I |
| CalibDepth: Unifying Depth Map Representation for Iterative LiDAR-Camera Online Calibration |
Jiangtong Zhu, Jianru Xue, Pu Zhang |
Xi’an Jiaotong University |
Sensor Fusion I |
| Shape Visual Servoing of a Tether Cable from Parabolic Features |
Lev Smolentsev, Alexandre Krupa, Francois Chaumette |
INRIA Rennes - Bretagne Atlantique,Centre Inria de l’Université de Rennes,Inria center at University of Rennes |
Visual Servoing |
| Deep Metric Learning for Visual Servoing: When Pose and Image Meet in Latent Space |
Samuel Felton, Elisa Fromont, Eric Marchand |
Université de Rennes , IRISA,Université of Rennes ,-- IRISA/Inria rba,Univ Rennes, Inria, CNRS, IRISA |
Visual Servoing |
| CNN-Based Visual Servoing for Simultaneous Positioning and Flattening of Soft Fabric Parts |
Fuyuki Tokuda, Akira Seino, Akinari Kobayashi, Kazuhiro Kosuge |
Centre for Transformative Garment Production,Tohoku University,The University of Hong Kong |
Visual Servoing |
| Dynamical System-Based Imitation Learning for Visual Servoing Using the Large Projection Formulation |
Antonio Paolillo, Paolo Robuffo Giordano, Matteo Saveriano |
IDSIA USI-SUPSI,IRISA CNRS UMR,University of Trento |
Visual Servoing |
| Constant Distance and Orientation Following of an Unknown Surface with a Cable-Driven Parallel Robot |
Thomas Rousseau, Nicolo Pedemonte, Stephane Caro, Francois Chaumette |
Nantes Université, LS,N, IRT Jules Verne,IRT Jules Verne,CNRS/LS,N,Inria center at University of Rennes |
Visual Servoing |
| 3D Spectral Domain Registration-Based Visual Servoing |
Komlan Adjigble, Brahim Tamadazte, Cristiana De Farias, Rustam Stolkin, Naresh Marturi |
University of Birmingham,CNRS |
Visual Servoing |
| Autonomous Endoscope Control Algorithm with Visibility and Joint Limits Avoidance Constraints for Da Vinci Research Kit Robot |
Rocco Moccia, Fanny Ficuciello |
Università degli Studi di Napoli Federico II,Università di Napoli Federico II |
Visual Servoing |
| Safe Control Using Vision-Based Control Barrier Function (V-CBF) |
Hossein Abdi, Golnaz Raja, Reza Ghabcheloo |
Tampere University |
Visual Servoing |
| DC-MOT: Motion Deblurring and Compensation for Multi-Object Tracking in UAV Videos |
Song Cheng, Meibao Yao, Xueming Xiao |
Jilin University,Changchun University of Science and Technology |
Visual Tracking |
| Fast Event-Based Double Integral for Real-Time Robotics |
Shijie Lin, Yinqiang Zhang, Dongyue Huang, Bin Zhou, Xiaowei Luo, Jia Pan |
The University of Hong Kong,The Chinese University of Hong Kong,Beihang University,City University, HONG KONG,University of Hong Kong |
Visual Tracking |
| Continuous-Time Gaussian Process Motion-Compensation for Event-Vision Pattern Tracking with Distance Fields |
Cedric Le Gentil, Ignacio Alzugaray, Teresa A. Vidal-Calleja |
University of Technology Sydney,Imperial College London |
Visual Tracking |
| EXOT: Exit-Aware Object Tracker for Safe Robotic Manipulation of Moving Object |
Hyunseo Kim, Hye Jung Yoon, Minji Kim, Dong-sig Han, Byoung-Tak Zhang |
Seoul National University |
Visual Tracking |
| Mono-STAR: Mono-Camera Scene-Level Tracking and Reconstruction |
Haonan Chang, Dhruv Metha Ramesh, Shijie Geng, Yuqiu Gan, Abdeslam Boularias |
Rutgers University,Columbia University |
Visual Tracking |
| DFR-FastMOT: Detection Failure Resistant Tracker for Fast Multi-Object Tracking Based on Sensor Fusion |
Mohamed Nagy, Majid Khonji, Jorge Dias, Sajid Javed |
Khalifa University |
Visual Tracking |
| Fusion of Events and Frames Using 8-DOF Warping Model for Robust Feature Tracking |
Min Seok Lee, Ye Jun Kim, Jae Hyung Jung, Chan Gook Park |
Seoul National University,Hyundai motor group |
Visual Tracking |
| 3DMODT: Attention-Guided Affinities for Joint Detection & Tracking in 3D Point Clouds |
Jyoti Kini, Ajmal Mian, Mubarak Shah |
University of Central Florida,University of Western Australia |
Visual Tracking |
| Inverse Reinforcement Learning Framework for Transferring Task Sequencing Policies from Humans to Robots in Manufacturing Applications |
Omey Mohan Manyar, Zachary Mcnulty, Stefanos Nikolaidis, Satyandra K. Gupta |
University of Southern California,UNIVERSITY OF SOUTHERN CALIFORNIA |
Robot Learning |
| Learning State Conditioned Linear Mappings for Low-Dimensional Control of Robotic Manipulators |
Michael Przystupa, Kerrick Johnstonbaugh, Zichen(Vincent) Zhang, Laura Petrich, Masood Dehghan, Faezeh Haghverd, Martin Jagersand |
University of Alberta,University of Alberta, Canada |
Robot Learning |
| Decoupling Skill Learning from Robotic Control for Generalizable Object Manipulation |
Kai Lu, Bo Yang, Bing Wang, Andrew Markham |
University of Oxford,The Hong Kong Polytechnic University,Oxford University |
Robot Learning |
| Comparison of Model-Based and Model-Free Reinforcement Learning for Real-World Dexterous Robotic Manipulation Tasks |
David Patricio Valencia Redrovan, John Jia, Raymond Li, Alex Hayashi, Reuel Terezakis, Trevor Gee, Minas Liarokapis, Bruce Macdonald, Henry Williams |
The University of Auckland,University of AUCKLAND,University of Auckland |
Robot Learning |
| Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control |
Murad Elnagdi, Nils Dengler, Jorge De Heuvel, Maren Bennewitz |
University of Bonn |
Robot Learning |
| Task-Driven Graph Attention for Hierarchical Relational Object Navigation |
Michael Lingelbach, Chengshu Li, Minjune Hwang, Andrey Kurenkov, Alan Lou, Roberto Martín-martín, Ruohan Zhang, Fei-Fei Li, Jiajun Wu |
Stanford University,University of Texas at Austin,Stanford University |
Robot Learning |
| Safety-Guaranteed Skill Discovery for Robot Manipulation Tasks |
Sunin Kim, Jaewoon Kwon, Taeyoon Lee, Younghyo Park, Julien Perez |
NAVER LABS,Naver labs,MIT,NAVER LABS EUROPE |
Robot Learning |
| A Framework for the Unsupervised Inference of Relations between Sensed Object Spatial Distributions and Robot Behaviors |
Christopher Morse, Lu Feng, Matthew Dwyer, Sebastian Elbaum |
University of Virginia |
Robot Learning |
| Learning Video-Conditioned Policies for Unseen Manipulation Tasks |
Elliot Chane-sane, Cordelia Schmid, Ivan Laptev |
Inria PARIS,Inria,INRIA |
Robot Learning |
| Learning Food Picking without Food: Fracture Anticipation by Breaking Reusable Fragile Objects |
Rinto Yagawa, Reina Ishikawa, Masashi Hamaya, Kazutoshi Tanaka, Atsushi Hashimoto, Hideo Saito |
Keio University,OMRON SINIC X Corporation,OMRON SINIC X |
Robot Learning |
| Learning Risk-Aware Costmaps Via Inverse Reinforcement Learning for Off-Road Navigation |
Samuel Triest, Mateo Guaman Castro, Parv Maheshwari, Matthew Sivaprakasam, Wenshan Wang, Sebastian Scherer |
Carnegie Mellon University,Indian Institute of Technology Kharagpur |
Robot Learning |
| How Does It Feel? Self-Supervised Costmap Learning for Off-Road Vehicle Traversability |
Mateo Guaman Castro, Samuel Triest, Wenshan Wang, Jason M. Gregory, Felix Sanchez, John G. Rogers Iii, Sebastian Scherer |
Carnegie Mellon University,US Army Research Laboratory,Booz Allen Hamilton |
Robot Learning |
| Global and Reactive Motion Generation with Geometric Fabric Command Sequences |
Weiming Zhi, Iretiayo Akinola, Karl Van Wyk, Nathan Ratliff, Fabio Ramos |
Carnegie Mellon University, University of Sydney,Columbia University,NVIDIA,University of Sydney, NVIDIA |
Learning for Control I |
| Enforcing the Consensus between Trajectory Optimization and Policy Learning for Precise Robot Control |
Quentin Le Lidec, Wilson Jallet, Ivan Laptev, Cordelia Schmid, Justin Carpentier |
INRIA-ENS-PSL,LAAS-CNRS,INRIA,Inria |
Learning for Control I |
| Neural Optimal Control Using Learned System Dynamics |
Kazim Selim Engin, Volkan Isler |
University of Minnesota |
Learning for Control I |
| Learned Risk Metric Maps for Kinodynamic Systems |
Ross Allen, Wei Xiao, Daniela Rus |
MIT Lincoln Laboratory,MIT |
Learning for Control I |
| Autonomous Drifting with 3 Minutes of Data Via Learned Tire Models |
Franck Djeumou, Jonathan Goh, Ufuk Topcu, Avinash Balachandran |
University of Texas at Austin,Toyota Research Institute,The University of Texas at Austin,Toyota Research Institue |
Learning for Control I |
| DDK: A Deep Koopman Approach for Longitudinal and Lateral Control of Autonomous Ground Vehicles |
Yongqian Xiao, Xinglong Zhang, Xin Xu, Lu Yang, Junxiang Li |
National University of Defense Technology,National university of defense technology |
Learning for Control I |
| Meta-Learning-Based Optimal Control for Soft Robotic Manipulators to Interact with Unknown Environments |
Zhiqiang Tang, Peiyi Wang, Wenci Xin, Zhexin Xie, Longxin Kan, Muralidharan Mohanakrishnan, Cecilia Laschi |
National University of Singapore,Beijing Jiaotong University |
Learning for Control I |
| Dealing with Sparse Rewards in Continuous Control Robotics Via Heavy-Tailed Policy Optimization |
Souradip Chakraborty, Amrit Bedi, Kasun Weerakoon, Prithvi Poddar, Alec Koppel, Pratap Tokekar, Dinesh Manocha |
UNIVERSITY OF MARYLAND,University of Maryland, College Park,IISER Bhopal,JP Morgan Chase,University of Maryland |
Learning for Control I |
| MPC with Sensor-Based Online Cost Adaptation |
Avadesh Meduri, Huaijiang Zhu, Armand Jordana, Ludovic Righetti |
New York University,NYU |
Learning for Control I |
| ReachLipBnB: A Branch-And-Bound Method for Reachability Analysis of Neural Network Autonomous Systems Using Lipschitz Bounds |
Taha Entesari, Sina Sharifi, Mahyar Fazlyab |
Johns Hopkins University |
Learning for Control I |
| Gradient-Based Trajectory Optimization with Learned Dynamics |
Bhavya Sukhija, Nathanael Köhler, Miguel Zamora, Simon Zimmermann, Sebastian Curi, Stelian Coros, Andreas Krause |
ETH Zürich,ETH Zurich |
Learning for Control I |
| RAMP-Net: A Robust Adaptive MPC for Quadrotors Via Physics-Informed Neural Network |
Sourav Sanyal, Kaushik Roy |
Purdue University |
Learning for Control I |
| 3-D Reconstruction Using Monocular Camera and Lights: Multi-View Photometric Stereo for Non-Stationary Robots |
Monika Roznere, Philippos Mordohai, Ioannis Rekleitis, Alberto Quattrini Li |
Dartmouth College,Stevens Institute of Technology,University of South Carolina |
Marine Robotics I |
| GMM Registration: A Probabilistic Scan Matching Approach for Sonar-Based AUV Navigation |
Pau Vial, Miguel Malagón Pedrosa, Ricard Segura, Narcís Palomeras, Marc Carreras |
Universitat de Girona ESQ,E,Universitat de Girona |
Marine Robotics I |
| Neural Implicit Surface Reconstruction Using Imaging Sonar |
Mohamad Qadri, Michael Kaess, Ioannis Gkioulekas |
Carnegie Mellon University |
Marine Robotics I |
| Conditional GANs for Sonar Image Filtering with Applications to Underwater Occupancy Mapping |
Tianxiang Lin, Akshay Hinduja, Mohamad Qadri, Michael Kaess |
Carnegie Mellon University |
Marine Robotics I |
| Stochastic Planning for ASV Navigation Using Satellite Images |
Yizhou Huang, Hamza Dugmag, Florian Shkurti, Timothy Barfoot |
University of Toronto |
Marine Robotics I |
| Autonomous Underwater Docking Using Flow State Estimation and Model Predictive Control |
Rakesh Vivekanandan, Geoffrey Hollinger, Dongsik Chang |
Oregon State University,Amazon |
Marine Robotics I |
| Real-Time Navigation for Autonomous Surface Vehicles in Ice-Covered Waters |
Rodrigue De Schaetzen, Alexander Botros, Robert Gash, Kevin Murrant, Stephen L. Smith |
University of Waterloo,National Research Council of Canada |
Marine Robotics I |
| Experiments in Underwater Feature Tracking with Performance Guarantees Using a Small AUV |
Benjamin Adams Biggs, Hans He, James Mcmahon, Daniel Stilwell |
Virginia Polytechnic Institute and State University,Virginia Tech,The Naval Research Laboratory |
Marine Robotics I |
| Robust Imaging Sonar-Based Place Recognition and Localization in Underwater Environments |
Hogyun Kim, Kang Gilhwan, Seokhwan Jeong, Seungjun Ma, Younggun Cho |
Inha University,Inha university |
Marine Robotics I |
| Deep Underwater Monocular Depth Estimation with Single-Beam Echosounder |
Haowen Liu, Monika Roznere, Alberto Quattrini Li |
Dartmouth College |
Marine Robotics I |
| Self-Supervised Monocular Depth Underwater |
Shlomi Amitai, Itzik Klein, Tali Treibitz |
University of Haifa |
Marine Robotics I |
| Performance Evaluation of 3D Keypoint Detectors and Descriptors on Coloured Point Clouds in Subsea Environments |
Kyungmin Jung, Thomas Hitchcox, James Richard Forbes |
McGill University |
Marine Robotics I |
| Puppeteer and Marionette: Learning Anticipatory Quadrupedal Locomotion Based on Interactions of a Central Pattern Generator and Supraspinal Drive |
Milad Shafiee, Guillaume Bellegarda, Auke Ijspeert |
EPFL |
Biomimetic Systems |
| A Performance Optimization Strategy Based on Improved NSGA-II for a Flexible Robotic Fish |
Ben Lu, Jian Wang, Xiaocun Liao, Qianqian Zou, Min Tan, Chao Zhou |
Institute of Automation, Chinese Academy of Sciences,Institution of Automation, Chinese Academy of sciences,Institute of Automation,Chinese Academy of Sciences,Chinese Academy of Sciences |
Biomimetic Systems |
| Swarm Robotics Search and Rescue: A Bee-Inspired Swarm Cooperation Approach without Information Exchange |
Yue Li, Yan Gao, Sijie Yang, Quan Quan |
Beihang University,School of Automation Science and Electrical Engineering, Beihang |
Biomimetic Systems |
| Achieving Extensive Trajectory Variation in Impulsive Robotic Systems |
Luis Viornery, Chloe Goode, Gregory Sutton, Sarah Bergbreiter |
Carnegie Mellon University,University of Lincoln |
Biomimetic Systems |
| Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail |
Yunxi Tang, Jiajun An, Xiangyu Chu, Shengzhi Wang, Ching Yan Wong, Samuel Au |
The Chinese University of Hong Kong |
Biomimetic Systems |
| Bioinspired Tearing Manipulation with a Robotic Fish |
Stanley Wang, Juan Romero, Monica Li, Peter Wainwright, Hannah Stuart |
University of California, Berkeley,UC Berkeley,University of California, Davis |
Biomimetic Systems |
| Learnable Tegotae-Based Feedback in CPGs with Sparse Observation Produces Efficient and Adaptive Locomotion |
Christopher Herneth, Mitsuhiro Hayashibe, Dai Owaki |
Technical University Munich,Tohoku University |
Biomimetic Systems |
| Multi-Segmented, Adaptive Feet for Versatile Legged Locomotion in Natural Terrain |
Abhishek Chatterjee, An Mo, Bernadett Kiss, Emre Cemal Gonen, Alexander Badri-Spröwitz |
Max Planck Institute for Intelligent Systems, Stuttgart,MPI IS Stuttgart,Max Planck Institute for Intelligent Systems |
Biomimetic Systems |
| Burst Stimulation for Enhanced Locomotion Control of Terrestrial Cyborg Insects |
Huu Duoc Nguyen, Hirotaka Sato, Tat Thang Vo Doan |
Nanyang Technological University,University of Freiburg |
Biomimetic Systems |
| Twisting Spine or Rigid Torso: Exploring Quadrupedal Morphology Via Trajectory Optimization |
J. Diego Caporale, Zeyuan Feng, Shane Rozen-levy, Aja Carter, Daniel Koditschek |
University of Pennsylvania |
Biomimetic Systems |
| Dynamic Locomotion of a Quadruped Robot with Active Spine Via Model Predictive Control |
Wanyue Li, Zida Zhou, Hui Cheng |
Sun Yat-sen University |
Biomimetic Systems |
| Scalable Task-Driven Robotic Swarm Control Via Collision Avoidance and Learning Mean-Field Control |
Kai Cui, Mengguang Li, Christian Fabian, Heinz Koeppl |
Technische Universität Darmstadt |
Aerial Robotics I |
| STD-Trees: Spatio-Temporal Deformable Trees for Multirotors Kinodynamic Planning |
Hongkai Ye, Chao Xu, Fei Gao |
Zhejiang University |
Aerial Robotics I |
| PredRecon: A Prediction-Boosted Planning Framework for Fast and High-Quality Autonomous Aerial Reconstruction |
Chen Feng, Haojia Li, Fei Gao, Boyu Zhou, Shaojie Shen |
The Hong Kong University of Science and Technology,Zhejiang University,Sun Yat-sen University,Hong Kong University of Science and Technology |
Aerial Robotics I |
| Vision-Aided UAV Navigation and Dynamic Obstacle Avoidance Using Gradient-Based B-Spline Trajectory Optimization |
Zhefan Xu, Yumeng Xiu, Xiaoyang Zhan, Baihan Chen, Kenji Shimada |
Carnegie Mellon University |
Aerial Robotics I |
| Multi-Agent Spatial Predictive Control with Application to Drone Flocking |
Andreas Brandstätter, Scott Smolka, Scott Stoller, Ashish Tiwari, Radu Grosu |
Technische Universität Wien,Stony Brook University,Microsoft Corp,TU Wien |
Aerial Robotics I |
| Multimodal Image Registration for GPS-Denied UAV Navigation Based on Disentangled Representations |
Huandong Li, Zhunga Liu, Yanyi Lyu, Feiyan Wu |
Northwestern Polytechnical University |
Aerial Robotics I |
| SEER: Safe Efficient Exploration for Aerial Robots Using Learning to Predict Information Gain |
Yuezhan Tao, Yuwei Wu, Beiming Li, Fernando Cladera, Alex Zhou, Dinesh Thakur, Vijay Kumar |
University of Pennsylvania |
Aerial Robotics I |
| Trajectory Planning for the Bidirectional Quadrotor As a Differentially Flat Hybrid System |
Katherine Mao, Jake Welde, M. Ani Hsieh, Vijay Kumar |
University of Pennsylvania |
Aerial Robotics I |
| Fisher Information Based Active Planning for Aerial Photogrammetry |
Jaeyoung Lim, Nicholas Lawrance, Florian Achermann, Thomas Stastny, Rik Marian Kai Bähnemann, Roland Siegwart |
ETH Zurich,CSIRO Data,ETH Zurich, ASL,Swiss Federal Institute of Technology (ETH Zurich),ETH Zürich |
Aerial Robotics I |
| Integrated Vector Field and Backstepping Control for Quadcopters |
Arthur Henrique Dias Nunes, Guilherme Vianna Raffo, Luciano Pimenta |
Universidade Federal de Minas Gerais |
Aerial Robotics I |
| Learning a Single Near-Hover Position Controller for Vastly Different Quadcopters |
Dingqi Zhang, Antonio Loquercio, Xiangyu Wu, Ashish Kumar, Jitendra Malik, Mark Wilfried Mueller |
University of California, Berkeley,UC Berkeley |
Aerial Robotics I |
| Forming and Controlling Hitches in Midair Using Aerial Robots |
Diego Salazar-Dantonio, Subhrajit Bhattacharya, David Saldana |
Lehigh University |
Aerial Robotics I |
| AirTrack: Onboard Deep Learning Framework for Long-Range Aircraft Detection and Tracking |
Sourish Ghosh, Jay Patrikar, Brady Moon, Milad Moghassem Hamidi, Sebastian Scherer |
Carnegie Mellon University |
Aerial Robot Learning |
| Towards a Reliable and Lightweight Onboard Fault Detection in Autonomous Unmanned Aerial Vehicles |
Sai Srinadhu Katta, Eduardo Viegas |
TII,Pontifícia Universidade Catolica do Paraná (PUCPR), Brazil |
Aerial Robot Learning |
| Variable Admittance Interaction Control of UAVs Via Deep Reinforcement Learning |
Yuting Feng, Chuanbeibei Shi, Jianrui Du, Yushu Yu, Fuchun Sun, Yixu Song |
Beijing Institute of Technology,Univeristy of Toronto,Tsinghua University,Tsinghua university |
Aerial Robot Learning |
| Learning Tethered Perching for Aerial Robots |
Fabian Hauf, Başaran Bahadır Koçer, Hai-nguyen Nguyen, Oscar Kwong Fai Pang, Ronald Clark, Edward Johns, Mirko Kovac |
Imperial College London,CNRS,University of Oxford |
Aerial Robot Learning |
| Credible Online Dynamics Learning for Hybrid UAVs |
David Rohr, Nicholas Lawrance, Olov Andersson, Roland Siegwart |
ETH Zurich,CSIRO Data,ETH Zürich |
Aerial Robot Learning |
| AZTR: Aerial Video Action Recognition with Auto Zoom and Temporal Reasoning |
Xijun Wang, Ruiqi Xian, Tianrui Guan, Celso De Melo, Stephen Nogar, Aniket Bera, Dinesh Manocha |
University of Maryland, College Park,University of Maryland-College Park,University of Maryland,CCDC US Army Research Laboratory,CCDC U.S. Army Research Laboratory,Purdue University |
Aerial Robot Learning |
| Follow the Rules: Online Signal Temporal Logic Tree Search for Guided Imitation Learning in Stochastic Domains |
Jasmine Jerry Aloor, Jay Patrikar, Parv Kapoor, Jean Oh, Sebastian Scherer |
Massachusetts Institute of Technology,Carnegie Mellon University |
Aerial Robot Learning |
| Continuity-Aware Latent Interframe Information Mining for Reliable UAV Tracking |
Changhong Fu, Mutian Cai, Sihang Li, Kunhan Lu, Haobo Zuo, Chongjun Liu |
Tongji University,Harbin Engineering University |
Aerial Robot Learning |
| Weighted Maximum Likelihood for Controller Tuning |
Angel Romero, Shreedhar Govil, Gonca Yilmaz, Yunlong Song, Davide Scaramuzza |
University of Zurich |
Aerial Robot Learning |
| User-Conditioned Neural Control Policies for Mobile Robotics |
Leonard Bauersfeld, Elia Kaufmann, Davide Scaramuzza |
University of Zurich (UZH),University of Zurich |
Aerial Robot Learning |
| Training Efficient Controllers Via Analytic Policy Gradient |
Nina Wiedemann, Valentin Wueest, Antonio Loquercio, Matthias Mueller, Dario Floreano, Davide Scaramuzza |
Robotics and Perception Group, University of Zürich,EPFL,UC Berkeley,Intel,Ecole Polytechnique Federal, Lausanne,University of Zurich |
Aerial Robot Learning |
| Parallel Reinforcement Learning Simulation for Visual Quadrotor Navigation |
Jack Saunders, Sajad Saeedi, Wenbin Li |
University of Bath,Toronto Metropolitan University |
Aerial Robot Learning |
| Toward Efficient Physical and Algorithmic Design of Automated Garages |
Teng Guo, Jingjin Yu |
Rutgers University |
Multi-Robot Systems I |
| Chronos and CRS: Design of a Miniature Car-Like Robot and a Software Framework for Single and Multi-Agent Robotics and Control |
Andrea Carron, Bodmer Sabrina, Lukas Vogel, René Zurbruegg, David Helm, Rahel Rickenbach, Simon Muntwiler, Jerome Sieber, Melanie N. Zeilinger |
ETH Zurich,ETH Zürich |
Multi-Robot Systems I |
| Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals |
Lucas Michael Streichenberg, Elia Trevisan, Jen Jen Chung, Roland Siegwart, Javier Alonso-Mora |
ETH Zurich,Delft University of Technology,The University of Queensland |
Multi-Robot Systems I |
| Mixed Observable RRT: Multi-Agent Mission-Planning in Partially Observable Environments |
Kasper Johansson, Ugo Rosolia, Wyatt Ubellacker, Andrew Singletary, Aaron Ames |
Stanford University,Caltech,California Institute of Technology |
Multi-Robot Systems I |
| RTAW: An Attention Inspired Reinforcement Learning Method for Multi-Robot Task Allocation in Warehouse Environments |
Aakriti Agrawal, Amrit Bedi, Dinesh Manocha |
University of Maryland, College Park,University of Maryland |
Multi-Robot Systems I |
| Hybrid SUSD-Based Task Allocation for Heterogeneous Multi-Robot Teams |
Shengkang Chen, Tony Lin, Said Al-abri, Ronald Arkin, Fumin Zhang |
Georgia Tech,Georgia Institute of Technology |
Multi-Robot Systems I |
| Search Algorithms for Multi-Agent Teamwise Cooperative Path Finding |
Zhongqiang Ren, Chaoran Zhang, Sivakumar Rathinam, Howie Choset |
Carnegie Mellon University,TAMU |
Multi-Robot Systems I |
| Collaborative Scheduling with Adaptation to Failure for Heterogeneous Robot Teams |
Peng Gao, Sriram Siva, Anthony Micciche, Hao Zhang |
University of Maryland, College Park,Colorado School of Mines,University of Massachusetts Amherst |
Multi-Robot Systems I |
| AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms in Cluttered Environments |
Vivek Kantilal Adajania, Siqi Zhou, Arun Singh, Angela P. Schoellig |
University of Toronto,Technical University of Munich,University of Tartu,TU Munich |
Multi-Robot Systems I |
| Decentralized Deadlock-Free Trajectory Planning for Quadrotor Swarm in Obstacle-Rich Environments |
Jungwon Park, Inkyu Jang, H. Jin Kim |
Seoul National University |
Multi-Robot Systems I |
| A Negative Imaginary Theory-Based Time-Varying Group Formation Tracking Scheme for Multi-Robot Systems: Applications to Quadcopters |
Yu-Hsiang Su, Parijat Bhowmick, Alexander Lanzon |
The University of Manchester,Indian Institute of Technology Guwahati |
Multi-Robot Systems I |
| Data-Driven Risk-Sensitive Model Predictive Control for Safe Navigation in Multi-Robot Systems |
Atharva Navsalkar, Ashish Hota |
Indian Institute of Technology Kharagpur,Indian Institute of Technology (IIT) Kharagpur |
Multi-Robot Systems I |
| Multi-Modal Hierarchical Transformer for Occupancy Flow Field Prediction in Autonomous Driving |
Haochen Liu, Zhiyu Huang, Chen Lv |
Nanyang Technological University |
Intelligent Transportation Systems I |
| Annotating Covert Hazardous Driving Scenarios Online: Utilizing the Driver’s Electroencephalography (EEG) Signals |
Chen Zheng, Muxiao Zi, Wenjie Jiang, Mengdi Chu, Yan Zhang, Jirui Yuan, Guyue Zhou, Jiangtao Gong |
Institute for AI Industry Research, Tsinghua University,Tsinghua University |
Intelligent Transportation Systems I |
| Pedestrian Crossing Action Recognition and Trajectory Prediction with 3D Human Keypoints |
Jiachen Li, Xinwei Shi, Feiyu Chen, Jonathan Stroud, Zhishuai Zhang, Tian Lan, Junhua Mao, Jeonhyung Kang, Khaled Refaat, Weilong Yang, Eugene Ie, Congcong Li |
Stanford University,Waymo LLC,Waymo,Google,Waymo Inc. |
Intelligent Transportation Systems I |
| Model-Agnostic Multi-Agent Perception Framework |
Runsheng Xu, Weizhe Chen, Hao Xiang, Xia Xin, Lantao Liu, Jiaqi Ma |
UCLA,Indiana University Bloomington,University of California, Los Angeles,Indiana University |
Intelligent Transportation Systems I |
| Explainable Action Prediction through Self-Supervision on Scene Graphs |
Pawit Kochakarn, Daniele De Martini, Daniel Omeiza, Lars Kunze |
University of Oxford |
Intelligent Transportation Systems I |
| CueCAn: Cue-Driven Contextual Attention for Identifying Missing Traffic Signs on Unconstrained Roads |
Varun Gupta, Anbumani Subramanian, C.V. Jawahar, Rohit Saluja |
IIIT, Hyderabad,Intel,IIIT Hyderabad |
Intelligent Transportation Systems I |
| Tackling Clutter in Radar Data - Label Generation and Detection Using PointNet++ |
Johannes Kopp, Dominik Kellner, Aldi Piroli, Klaus Dietmayer |
Ulm University, Germany,BMW AG,Universität Ulm,University of Ulm |
Intelligent Transportation Systems I |
| Effective Combination of Vertical, Longitudinal and Lateral Data for Vehicle Mass Estimation |
Younesse EL MRHASLI, Bruno Monsuez, Xavier Mouton |
ENSTA PARIS,ENSTA-ParisTech,Groupe Renault |
Intelligent Transportation Systems I |
| Receding Horizon Planning with Rule Hierarchies for Autonomous Vehicles |
Sushant Veer, Karen Yan Ming Leung, Ryan Cosner, Yuxiao Chen, Peter Karkus, Marco Pavone |
NVIDIA,Stanford University, NVIDIA Research, University of Washington,California Institute of Technology,Nvidia research,Stanford University |
Intelligent Transportation Systems I |
| Active Probing and Influencing Human Behaviors Via Autonomous Agents |
Shuangge Wang, Yiwei Lyu, John Dolan |
University of Southern California,Carnegie Mellon University |
Intelligent Transportation Systems I |
| TrafficBots: Towards World Models for Autonomous Driving Simulation and Motion Prediction |
Zhejun Zhang, Alexander Liniger, Dengxin Dai, Fisher Yu, Luc Van Gool |
ETH Zurich,ETH Zürich |
Intelligent Transportation Systems I |
| SHAIL: Safety-Aware Hierarchical Adversarial Imitation Learning for Autonomous Driving in Urban Environments |
Arec Jamgochian, Etienne Buehrle, Johannes Fischer, Mykel Kochenderfer |
Stanford University,Karlsruhe Institute of Technology |
Intelligent Transportation Systems I |
| Reinforcement Learning-Based Optimal Multiple Waypoint Navigation |
Christos Vlachos, Panagiotis Rousseas, Charalampos Bechlioulis, Kostas Kyriakopoulos |
National Technical University of Athens,University of Patras,National Technical Univ. of Athens |
Motion and Path Planning I |
| DriveIRL: Drive in Real Life with Inverse Reinforcement Learning |
Tung Phan-minh, Forbes Howington, Ting-sheng Chu, Momchil Tomov, Robert Beaudoin, Sang Uk Lee, Nanxiang Li, Caglayan Dicle, Samuel Findler, Francisco Suárez-Ruiz, Bo Yang, Sammy Omari, Eric Wolff |
Motional AD,Motional,University of Michigan,Bosch Research and Technology Center,Senior Software Engineer at Motional,Nanyang Technological University,ETH Zurich,California Institute of Technology |
Motion and Path Planning I |
| LES: Locally Exploitative Sampling for Robot Path Planning |
Sagar Joshi, Seth Hutchinson, Panagiotis Tsiotras |
Aurora Innovation,Georgia Institute of Technology,Georgia Tech |
Motion and Path Planning I |
| Boundary Conditions in Geodesic Motion Planning for Manipulators |
Mario Laux, Andreas Zell |
University of Tübingen |
Motion and Path Planning I |
| TOFG: A Unified and Fine-Grained Environment Representation in Autonomous Driving |
Zihao Wen, Yifan Zhang, Xinhong Chen, Jianping Wang |
City University of Hong Kong |
Motion and Path Planning I |
| Unidirectional-Road-Network-Based Global Path Planning for Cleaning Robots in Semi-Structured Environments |
Yong Li, Hui Cheng |
Guangzhou Shiyuan Electronic Technology Co., Ltd,Sun Yat-sen University |
Motion and Path Planning I |
| A Hierarchical Decoupling Approach for Fast Temporal Logic Motion Planning |
Ziyang Chen, Zhangli Zhou, Shaochen Wang, Zhen Kan |
University of Science and Technology of China |
Motion and Path Planning I |
| A Fast Two-Stage Approach for Multi-Goal Path Planning in a Fruit Tree |
Werner Kroneman, João Valente, Frank Van Der Stappen |
University College Roosevelt,Wageningen University & Research,Utrecht University |
Motion and Path Planning I |
| Online Whole-Body Motion Planning for Quadrotor Using Multi-Resolution Search |
Yunfan Ren, Siqi Liang, Fangcheng Zhu, Guozheng Lu, Fu Zhang |
The University of Hong Kong,Harbin Institute of Technology, Shenzhen,University of Hong Kong |
Motion and Path Planning I |
| Intermittent Diffusion Based Path Planning for Heterogeneous Groups of Mobile Sensors in Cluttered Environments |
Christina Frederick, Haomin Zhou, Frank Crosby |
NJIT,Georgia Institute of Technology,USNWC PC |
Motion and Path Planning I |
| GANet: Goal Area Network for Motion Forecasting |
Mingkun Wang, Xinge Zhu, Changqian Yu, Wei Li, Yuexin Ma, Ruochun Jin, Xiaoguang Ren, Dongchun Ren, Mingxu Wang, Wenjing Yang |
Peking University,CUHK,Meituan,Inceptio,ShanghaiTech University,National University of Defense Technology,Academy of Military Sciences,Fudan University,State Key Laboratory of High Performance Computing (HPCL), Schoo |
Motion and Path Planning I |
| FlowMap: Path Generation for Automated Vehicles in Open Space Using Traffic Flow |
Wenchao Ding, Jieru Zhao, Yubin Chu, Haihui Huang, Tong Qin, Chunjing Xu, Yuxiang Guan, Zhongxue Gan |
Fudan University,Shanghai Jiao Tong University,Dalian University of Technology,Zhejiang University,Huawei Techonology,Huawei Technologies |
Motion and Path Planning I |
| An Architecture for Reactive Mobile Manipulation On-The-Move |
Ben Burgess-Limerick, Christopher Lehnert, Jurgen Leitner, Peter Corke |
Queensland University of Technology,LYRO Robotics & Monash University |
Reactive and Sensor-Based Planning |
| Multi-Robot Mission Planning in Dynamic Semantic Environments |
Samarth Kalluraya, George J. Pappas, Yiannis Kantaros |
Washington University in St. Louis,University of Pennsylvania |
Reactive and Sensor-Based Planning |
| A System for Generalized 3D Multi-Object Search |
Kaiyu Zheng, Anirudha Paul, Stefanie Tellex |
Brown University,Brown |
Reactive and Sensor-Based Planning |
| A General Class of Combinatorial Filters That Can Be Minimized Efficiently |
Yulin Zhang, Dylan Shell |
Amazon,Texas A&M University |
Reactive and Sensor-Based Planning |
| Cautious Planning with Incremental Symbolic Perception: Designing Verified Reactive Driving Maneuvers |
Disha Kamale, Sofie Haesaert, Cristian Ioan Vasile |
Lehigh University,Eindhoven University of Technology |
Reactive and Sensor-Based Planning |
| Decision Diagrams As Plans: Answering Observation-Grounded Queries |
Dylan Shell, Jason O’kane |
Texas A&M University |
Reactive and Sensor-Based Planning |
| Obstacle Avoidance Using Raycasting and Riemannian Motion Policies at kHz Rates for MAVs |
Michael Pantic, Isar Meijer, Rik Marian Kai Bähnemann, Nikhilesh Alatur, Olov Andersson, Cesar D. Cadena Lerma, Roland Siegwart, Lionel Ott |
ETH Zürich,ETH Zurich |
Reactive and Sensor-Based Planning |
| Adaptive and Explainable Deployment of Navigation Skills Via Hierarchical Deep Reinforcement Learning |
Kyowoon Lee, Seongun Kim, Jaesik Choi |
Ulsan National Institute of Science and Technology,Korea Advanced Institute of Science and Technology |
Reactive and Sensor-Based Planning |
| Learning Agile Flight Maneuvers: Deep SE(3) Motion Planning and Control for Quadrotors |
Yixiao Wang, Bingheng Wang, Shenning Zhang, Han Wei Sia, Lin Zhao |
National University of Singapore,ST Engineering |
Collision Avoidance |
| Robust MADER: Decentralized and Asynchronous Multiagent Trajectory Planner Robust to Communication Delay |
Kota Kondo, Jesus Tordesillas Torres, Reinaldo Figueroa, Juan Rached, Joseph Merkel, Parker Lusk, Jonathan Patrick How |
Massachusetts Institute of Technology,MIT Aerospace Controls Lab |
Collision Avoidance |
| Obstacle Identification and Ellipsoidal Decomposition for Fast Motion Planning in Unknown Dynamic Environments |
Mehmetcan Kaymaz, Nazim Ure |
Istanbul Technical University |
Collision Avoidance |
| Safe Operations of an Aerial Swarm Via a Cobot Human Swarm Interface |
Sydrak Abdi, Derek Paley |
University of Maryland |
Collision Avoidance |
| MonoGraspNet: 6-DoF Grasping with a Single RGB Image |
Guangyao Zhai, Dianye Huang, Shun-cheng Wu, Hyunjun Jung, Yan Di, Fabian Manhardt, Federico Tombari, Nassir Navab, Benjamin Busam |
Technical University of Munich,Google,Technische Universität München,TU Munich |
Perception for Grasping and Manipulation I |
| USEEK: Unsupervised SE(3)-Equivariant 3D Keypoints for Generalizable Manipulation |
Zhengrong Xue, Zhecheng Yuan, Jiashun Wang, Xueqian Wang, Yang Gao, Huazhe Xu |
Shanghai Jiao Tong University,Tsinghua University,Carnegie Mellon University,Center for Artificial Intelligence and Robotics, Graduate School |
Perception for Grasping and Manipulation I |
| Semantic Mapping with Confidence Scores through Metric Embeddings and Gaussian Process Classification |
Jungseok Hong, Suveer Garg, Volkan Isler |
University of Minnesota,University of Pennsylvania |
Perception for Grasping and Manipulation I |
| The Third Generation (G3) Dual-Modal and Dual Sensing Mechanisms (DMDSM) Pretouch Sensor for Robotic Grasping |
Cheng Fang, Shuangliang Li, Di Wang, Fengzhi Guo, Dezhen Song, Jun Zou |
Texas A&M University |
Perception for Grasping and Manipulation I |
| Learning Height for Top-Down Grasps with the DIGIT Sensor |
Thais Bernardi, Yoann Fleytoux, Jean-Baptiste Mouret, Serena Ivaldi |
Inria,INRIA |
Perception for Grasping and Manipulation I |
| Instance-Wise Grasp Synthesis for Robotic Grasping |
Yucheng Xu, Mohammadreza Kasaei, Hamidreza Kasaei, Zhibin Li |
University of Edinburgh,University of Groningen,University College London |
Perception for Grasping and Manipulation I |
| Joint Segmentation and Grasp Pose Detection with Multi-Modal Feature Fusion Network |
Xiaozheng Liu, Yunzhou Zhang, He Cao, Shan Dexing, Jiaqi Zhao |
Northeastern University |
Perception for Grasping and Manipulation I |
| GraspNeRF: Multiview-Based 6-DoF Grasp Detection for Transparent and Specular Objects Using Generalizable NeRF |
Qiyu Dai, Yan Zhu, Yiran Geng, Ciyu Ruan, Jiazhao Zhang, He Wang |
Peking University,National University of Defense Technology |
Perception for Grasping and Manipulation I |
| Elastic Context: Encoding Elasticity for Data-Driven Models of Textiles |
Alberta Longhini, Marco Moletta, Alfredo Reichlin, Michael Welle, Alexander Kravberg, Yufei Wang, David Held, Zackory Erickson, Danica Kragic |
KTH Royal Institute of Technology,Carnegie Mellon University,KTH |
Perception for Grasping and Manipulation I |
| Vision-Based Six-Dimensional Peg-In-Hole for Practical Connector Insertion |
Kun Zhang, Chen Wang, Hua Chen, Jia Pan, Michael Y. Wang, Wei Zhang |
Hong Kong University of Science and Technology,The University of Hong Kong,Southern University of Science and Technology,University of Hong Kong,Monash University |
Perception for Grasping and Manipulation I |
| RGB-Only Reconstruction of Tabletop Scenes for Collision-Free Manipulator Control |
Zhenggang Tang, Balakumar Sundaralingam, Jonathan Tremblay, Bowen Wen, Ye Yuan, Stephen Tyree, Charles Loop, Alexander Schwing, Stan Birchfield |
University of Illinois Urbana-Champaign,NVIDIA Corporation,Nvidia,NVIDIA,Carnegie Mellon University,University of Illinois at Urbana-Champaign |
Perception for Grasping and Manipulation I |
| Multi-View Object Pose Estimation from Correspondence Distributions and Epipolar Geometry |
Rasmus Haugaard, Thorbjørn Mosekjær Iversen |
University of Southern Denmark,The Maersk Mc-Kinney Moller Institute, University of Southern De |
Perception for Grasping and Manipulation I |
| FSG-Net: A Deep Learning Model for Semantic Robot Grasping through Few-Shot Learning |
Leonardo Barcellona, Alberto Bacchin, Alberto Gottardi, Emanuele Menegatti, Stefano Ghidoni |
University of Padova,University of Padua,The University of Padua |
Learning for Grasping and Manipulation I |
| Learning Pre-Grasp Manipulation of Flat Objects in Cluttered Environments Using Sliding Primitives |
Jiaxi Wu, Haoran Wu, Shanlin Zhong, Quqin Sun, Yinlin Li |
Peking University,University of Science and Technology of China,Institute of Automation, Chinese Academy of Sciences,Wuhan Second.Ship Design.and Research Institute |
Learning for Grasping and Manipulation I |
| Learning Category-Level Manipulation Tasks from Point Clouds with Dynamic Graph CNNs |
Junchi Liang, Abdeslam Boularias |
Rutgers University |
Learning for Grasping and Manipulation I |
| Neural Grasp Distance Fields for Robot Manipulation |
Thomas Weng, David Held, Franziska Meier, Mustafa Mukadam |
Carnegie Mellon University,Facebook,Facebook AI Research |
Learning for Grasping and Manipulation I |
| Planning for Multi-Object Manipulation with Graph Neural Network Relational Classifiers |
Yixuan Huang, Adam Conkey, Tucker Hermans |
University of Utah |
Learning for Grasping and Manipulation I |
| Local Neural Descriptor Fields: Locally Conditioned Object Representations for Manipulation |
Ethan Chun, Yilun Du, Anthony Simeonov, Tomas Lozano-Perez, Leslie Kaelbling |
Massachusetts Institute of Technology,MIT |
Learning for Grasping and Manipulation I |
| Practical Visual Deep Imitation Learning Via Task-Level Domain Consistency |
Mohi Khansari, Daniel Ho, Yuqing Du, Armando Fuentes, Matthew Bennice, Nicolas Sievers, Sean Kirmani, Yunfei Bai, Eric Jang |
Google X,UC Berkeley,Everyday Robots,X, The Moonshot Factory,Halodi Robotics |
Learning for Grasping and Manipulation I |
| SEIL: Simulation-Augmented Equivariant Imitation Learning |
Mingxi Jia, Dian Wang, Guanang Su, David Klee, Xupeng Zhu, Robin Walters, Robert Platt |
Northeastern University |
Learning for Grasping and Manipulation I |
| Dextrous Tactile In-Hand Manipulation Using a Modular Reinforcement Learning Architecture |
Johannes Pitz, Lennart Röstel, Leon Sievers, Berthold Bäuml |
German Aerospace Center,German Aerospace Center (DLR) |
Learning for Grasping and Manipulation I |
| Learning Tool Morphology for Contact-Rich Manipulation Tasks with Differentiable Simulation |
Mengxi Li, Rika Antonova, Dorsa Sadigh, Jeannette Bohg |
Stanford University |
Learning for Grasping and Manipulation I |
| CabiNet: Scaling Neural Collision Detection for Object Rearrangement with Procedural Scene Generation |
Adithyavairavan Murali, Arsalan Mousavian, Clemens Eppner, Adam Fishman, Dieter Fox |
Nvidia Corporation,NVIDIA,University of Washington |
Learning for Grasping and Manipulation I |
| NIFT: Neural Interaction Field and Template for Object Manipulation |
Zeyu Huang, Juzhan Xu, Sisi Dai, Kai Xu, Hao Zhang, Hui Huang, Ruizhen Hu |
Shenzhen University,National University of Defense Technology,Simon Fraser University |
Learning for Grasping and Manipulation I |
| Place Recognition under Occlusion and Changing Appearance Via Disentangled Representations |
Yue Chen, Xingyu Chen, Yicen Li |
Xi’an Jiaotong University,Laboratory of Visual Cognitive Computing and Intelligent Vehicle,McMaster University |
Localization I |
| GIDP: Learning a Good Initialization and Inducing Descriptor Post-Enhancing for Large-Scale Place Recognition |
Zhaoxin Fan, Zhenbo Song, Jun He, Hongyan Liu |
Renmin University of China,Nanjing University of Science and Technology,Tsinghua University |
Localization I |
| STD: Stable Triangle Descriptor for 3D Place Recognition |
Yuan Chongjian, Jiarong Lin, Zuhao Zou, Xiaoping Hong, Fu Zhang |
The University of Hong Kong,HongKong University,Southern University of Science and Technology,University of Hong Kong |
Localization I |
| DeepRING: Learning Roto-Translation Invariant Representation for LiDAR Based Place Recognition |
Sha Lu, Xuecheng Xu, Li Tang, Rong Xiong, Yue Wang |
Zhejiang University |
Localization I |
| Sensor Localization by Few Distance Measurements Via the Intersection of Implicit Manifolds |
Michael Moshe Bilevich, Steven M Lavalle, Dan Halperin |
Tel Aviv University,University of Oulu |
Localization I |
| Boosting Performance of a Baseline Visual Place Recognition Technique by Predicting the Maximally Complementary Technique |
Connor Malone, Stephen Hausler, Tobias Fischer, Michael J Milford |
Queensland University of Technology,CSIRO |
Localization I |
| Loosely-Coupled Localization Fusion System Based on Track-To-Track Fusion with Bias Alignment |
Soyeong Kim, Kichun Jo, Benazouz Bradai, Paulo Resende, Jaeyoung Jo |
Konkuk University,Valeo,Konkuk university, Smart vehicle engineering |
Localization I |
| Portable Multi-Hypothesis Monte Carlo Localization for Mobile Robots |
Alberto García, Francisco Martin Rico, Jose Miguel Guerrero, Francisco Javier Rodríguez Lera, Vicente Matellan |
Universidad Rey Juan Carlos,Carnegie Mellon University,Rey Juan Carlos University,Universidad de León,Universidad de Leon |
Localization I |
| CPnP: Consistent Pose Estimator for Perspective-N-Point Problem with Bias Elimination |
Guangyang Zeng, Shiyu Chen, Biqiang Mu, Guodong Shi, Junfeng Wu |
The Chinese University of Hong Kong, Shenzhen,Chinese Academy of Sciences,The University of Sydney,The Chinese Unviersity of Hong Kong, Shenzhen |
Localization I |
| LiDAR-Based Indoor Localization with Optimal Particle Filters Using Surface Normal Constraints |
Heruka Andradi, Sebastian Blumenthal, Erwin Prassler, Paul G. Plöger |
Hochschule Bonn Rhein Sieg,Locomotec,Bonn-Rhein-Sieg Univ. of Applied Sciences |
Localization I |
| Efficient Planar Pose Estimation Via UWB Measurements |
Haodong Jiang, Wentao Wang, Yuan Shen, Xinghan Li, Xiaoqiang Ren, Biqiang Mu, Junfeng Wu |
The Chinese University of Hong Kong, Shenzhen,ZhejiangUniversity,Nanjing University of Science and Technology,Zhejiang university,Shanghai University,Chinese Academy of Sciences,The Chinese Unviersity of Hong Kong, Shenzhen |
Localization I |
| Visual Pitch and Roll Estimation for Inland Water Vessels |
Dennis Griesser, Georg Umlauf, Matthias Franz |
University of Applied Sciences Konstanz, Institute for Optical S |
Vision-Based Navigation I |
| GPF-BG: A Hierarchical Vision-Based Planning Framework for Safe Quadrupedal Navigation |
Shiyu Feng, Ziyi Zhou, Justin Smith, Maxwell Asselmeier, Ye Zhao, Patricio A. Vela |
Georgia Institute of Technology |
Vision-Based Navigation I |
| Direct Angular Rate Estimation without Event Motion-Compensation at High Angular Rates |
Matthew Ng, Xinyu Cai, Shaohui Foong |
Singapore University of Technology and Design |
Vision-Based Navigation I |
| StereoVAE: A Lightweight Stereo-Matching System Using Embedded GPUs |
Qiong Chang, Li Xiang, Xu Xin, Xin Liu, Yun Li, Jun Miyazaki |
Tokyo Institute of Technology,NanJing University,National Institute of Advanced Industrial Science and Technology,Tokyo Institute of Technology School of Computing |
Vision-Based Navigation I |
| Learning Perception-Aware Agile Flight in Cluttered Environments |
Yunlong Song, Kexin Shi, Robert Pěnička, Davide Scaramuzza |
University of Zurich,Universität Zürich,Czech Technical University in Prague |
Vision-Based Navigation I |
| NanoFlowNet: Real-Time Dense Optical Flow on a Nano Quadcopter |
Rik Jan Bouwmeester, Federico Paredes-valles, Guido De Croon |
Delft University of Technology,TU Delft |
Vision-Based Navigation I |
| Zero-Shot Active Visual Search (ZAVIS): Intelligent Object Search for Robotic Assistants |
Jeongeun Park, Taerim Yoon, Jejoon Hong, Youngjae Yu, Matthew Pan, Sungjoon Choi |
Korea University,Yonsei University,Queen’s University |
Vision-Based Navigation I |
| Memory-Based Exploration-Value Evaluation Model for Visual Navigation |
Yongquan Feng, Liyang Xu, Minglong Li, Ruochun Jin, Da Huang, Shaowu Yang, Wenjing Yang |
National University of Defense Technology,NUDT,the State Key Laboratory of High Performance Computing (HPCL) &,State Key Laboratory of High Performance Computing (HPCL), Schoo |
Vision-Based Navigation I |
| ViNL: Visual Navigation and Locomotion Over Obstacles |
Simar Kareer, Naoki Yokoyama, Dhruv Batra, Sehoon Ha, Joanne Truong |
Georgia Tech,Georgia Institute of Technology,Georgia Tech / Facebook AI Research,The Georgia Institute of Technology |
Vision-Based Navigation I |
| Zero-Shot Object Goal Visual Navigation |
Qianfan Zhao, Lu Zhang, Bin He, Hong Qiao, Zhiyong Liu |
State Key Laboratory of Management and Control for Complex Syste,Institute of Automation, Chinese Academy of Science,Tongji University,Institute of Automation, Chinese Academy of Sciences,Institute of Automation Chinese Academy of Sciences |
Vision-Based Navigation I |
| Monocular Simultaneous Localization and Mapping Using Ground Textures |
Kyle Hart, Brendan Englot, Ryan O’shea, John Kelly, David Martinez |
Stevens Institute of Technology,Naval Air Warfare Center Aircraft Division,RISE Laboratory at Naval Air Warfare Center,Pennsylvania State University |
Vision-Based Navigation I |
| WAVN: Wide Area Visual Navigation for Large-Scale, GPS-Denied Environments |
Damian Lyons, Mohamed Rahouti |
Fordham University |
Vision-Based Navigation I |
| ORORA: Outlier-Robust Radar Odometry |
Hyungtae Lim, Kawon Han, Gunhee Shin, Giseop Kim, Songcheol Hong, Hyun Myung |
Korea Advanced Institute of Science and Technology,Inha University,NAVER LABS,KAIST (Korea Advanced Institute of Science and Technology) |
Localization and Mapping I |
| AdaSfM: From Coarse Global to Fine Incremental Adaptive Structure from Motion |
Yu Chen, Zihao Yu, Shu Song, Jianming Li, Tianning Yu, Gim Hee Lee |
National University of Singapore,Beihang University,Nreal,Segway Ninebot,Willand Company |
Localization and Mapping I |
| Robust Map Fusion with Visual Attention Utilizing Multi-Agent Rendezvous |
Jaein Kim, Dong-sig Han, Byoung-Tak Zhang |
Seoul National University |
Localization and Mapping I |
| Wi-Closure: Reliable and Efficient Search of Inter-Robot Loop Closures Using Wireless Sensing |
Weiying Wang, Anne Kemmeren, Daniel Son, Javier Alonso-Mora, Stephanie Gil |
Harvard University,Delft University,Delft University of Technology |
Localization and Mapping I |
| COVINS-G: A Generic Back-End for Collaborative Visual-Inertial SLAM |
Manthan Patel, Marco Karrer, Philipp Baenninger, Margarita Chli |
ETH Zurich |
Localization and Mapping I |
| PIEKF-VIWO: Visual-Inertial-Wheel Odometry Using Partial Invariant Extended Kalman Filter |
Tong Hua, Tao Li, Ling Pei |
Shanghai Jiao Tong University |
Localization and Mapping I |
| Observability-Aware Active Extrinsic Calibration of Multiple Sensors |
Shida Xu, Jonatan Scharff Willners, Ziyang Hong, Kaicheng Zhang, Y. R. Petillot, Sen Wang |
Imperial College London,Heriot-Watt University |
Localization and Mapping I |
| Learning Continuous Control Policies for Information-Theoretic Active Perception |
Pengzhi Yang, Yuhan Liu, Shumon Koga, Arash Asgharivaskasi, Nikolay A. Atanasov |
University of Electronic Science and Technology of China,University of California, San Diego,University of California San Diego |
Localization and Mapping I |
| Structure PLP-SLAM: Efficient Sparse Mapping and Localization Using Point, Line and Plane for Monocular, RGB-D and Stereo Cameras |
Fangwen Shu, Jiaxuan Wang, Alain Pagani, Stricker Didier |
DFKI,German Research Center for Artificial Intelligence |
Localization and Mapping I |
| Rotation Synchronization Via Deep Matrix Factorization |
Tejus Gk, Giacomo Zara, Paolo Rota, Andrea Fusiello, Elisa Ricci, Federica Arrigoni |
Indian Institute of Technology (ISM) Dhanbad,University of Trento,University of Udine,Politecnico di Milano |
Localization and Mapping I |
| Object-Based SLAM Utilizing Unambiguous Pose Parameters Considering General Symmetry Types |
Taekbeom Lee, Youngseok Jang, H. Jin Kim |
Seoul National University |
Localization and Mapping I |
| Towards View-Invariant and Accurate Loop Detection Based on Scene Graph |
Chuhao Liu, Shaojie Shen |
Hong Kong University of Science and Technology |
Localization and Mapping I |
| ViViD++: Vision for Visibility Dataset |
Alex Lee, Younggun Cho, Young-Sik Shin, Ayoung Kim, Hyun Myung |
Hyundai Motor Company,Inha University,KIMM,Seoul National University,KAIST (Korea Advanced Institute of Science and Technology) |
SLAM 2 |
| CamMap: Extrinsic Calibration of Non-Overlapping Cameras Based on SLAM Map Alignment |
Jie Xu, Ruifeng Li, Lijun Zhao, Wenlu Yu, Zhiheng Liu, Bo Zhang, Yuchen Li |
Harbin Institute of Technology,harbin institute of technology |
SLAM 2 |
| Hybrid Visual SLAM for Underwater Vehicle Manipulator Systems |
Gideon Billings, Richard Camilli, Matthew Johnson-Roberson |
University of Sydney, Australian Center for Field Robotics,Woods Hole Oceanographic Institution,University of Michigan |
SLAM 2 |
| WOLF: A Modular Estimation Framework for Robotics Based on Factor Graphs |
Joan Solà, Joan Vallvé, Joaquim Casals, Jeremie Deray, Mederic Fourmy, Dinesh Atchuthan, Andreu Corominas-murtra, Juan Andrade-Cetto |
Institut de Robòtica i Informàtica Industrial,CSIC-UPC,Institut de Robòtica i Informàtica Industrial, CSIC-UPC,LAAS, CNRS,EasyMile,Beta Robots SL |
SLAM 2 |
| Point Cloud Change Detection with Stereo V-SLAM: Dataset, Metrics and Baseline |
Zihan Lin, Yu Jincheng, Lipu Zhou, Xudong Zhang, Jian Wang, Yu Wang |
Tsinghua University,MeiTuan,Tsinghua Univ. |
SLAM 2 |
| Hilti-Oxford Dataset: A Millimeter-Accurate Benchmark for Simultaneous Localization and Mapping |
Lintong Zhang, Michael Helmberger, Lanke Frank Tarimo Fu, David Wisth, Marco Camurri, Davide Scaramuzza, Maurice Fallon |
University of Oxford,HILTI AG,Free University of Bozen-Bolzano,University of Zurich |
SLAM 2 |
| Long-Term Visual SLAM with Bayesian Persistence Filter Based Global Map Prediction |
Tianchen Deng, Hongle Xie, Jingchuan Wang, Weidong Chen |
Shanghai Jiao Tong University |
SLAM 2 |
| Wheel-SLAM: Simultaneous Localization and Terrain Mapping Using One Wheel-Mounted IMU |
Yibin Wu, Jian Kuang, Xiaoji Niu, Jens Behley, Lasse Klingbeil, Heiner Kuhlmann |
University of Bonn,Wuhan University |
SLAM 2 |
| Maplab 2.0 - a Modular and Multi-Modal Mapping Framework |
Andrei Cramariuc, Lukas Bernreiter, Florian Tschopp, Marius Fehr, Victor Reijgwart, Juan Nieto, Roland Siegwart, Cesar D. Cadena Lerma |
ETHZ,ETH Zurich, Autonomous Systems Lab,Arrival Ltd,Voliro AG,ETH Zurich,Microsoft |
SLAM 2 |
| Simulation Data Driven Design Optimization for Reconfigurable Soft Gripper System |
Jun LIU, Jin Huat Low, Qian Qian Han, Marisa Lim, Dingjie Lu, Yangfan Li, Chen-Hua Yeow, Zhuangjian Liu |
IHPC, ASTAR,National University of Singapore,IHPC, ASTAR,Institute of High Performance Computing, AStar,INSTITUTE OF HIGH PERFORMANCE COMPUTING |
Modeling, Control, and Learning for Soft Robots |
| Research on Design and Experiment of a Wearable Hand Rehabilitation Device Driven by Fiber-Reinforced Soft Actuator |
Kaiwei Ma, Zhenjiang Jiang, Shuang Gao, Guoping Jiang, Fengyu Xu |
Nanjing University of Posts and Telecommunications,southeast university |
Modeling, Control, and Learning for Soft Robots |
| DNN-Based Predictive Model for a Batoid-Inspired Soft Robot |
Guangtong Li, Thileepan Stalin, Truong Van Tien, Pablo Valdivia |
Singapore University of Technology and Design,Singapore University of Technology and Design, MIT |
Modeling, Control, and Learning for Soft Robots |
| Modeling the Locomotion of Articulated Soft Robots in Granular Medium |
Yayun Du, Jacqueline Lam, Karunesh Sachanandani, Mohammad Khalid Jawed |
University of California, Los Angeles,UCLA |
Modeling, Control, and Learning for Soft Robots |
| SoRoSim: A MATLAB Toolbox for Hybrid Rigid-Soft Robots Based on the Geometric Variable-Strain Approach |
Anup Teejo Mathew, Ikhlas Mohamed Ben Hmida, Costanza Armanini, Frédéric Boyer, Federico Renda |
Khalifa University,IMT atlantique,Khalifa University of Science and Technology |
Modeling, Control, and Learning for Soft Robots |
| A Geometrically-Exact Assumed Strain Modes Approach for the Geometrico and Kinemato-Static Modellings of Continuum Parallel Robots |
Sébastien Briot, Frédéric Boyer |
LS,N,IMT atlantique |
Modeling, Control, and Learning for Soft Robots |
| Towards a Physics-Based Model for Steerable Eversion Growing Robots |
Zicong Wu, Mikel De Iturrate Reyzabal, S.M.Hadi Sadati, Hongbin Liu, Sebastien Ourselin, Daniel Richard Leff, Robert Kevin Katzschmann, Kawal Rhode, Christos Bergeles |
King’s College London,Hong Kong Institute of Science & Innovation, Chinese Academy of ,University College London,Imperial College London,ETH Zurich |
Modeling, Control, and Learning for Soft Robots |
| P-satI-D Shape Regulation of Soft Robots |
Pietro Pustina, Pablo Borja, Cosimo Della Santina, Alessandro De Luca |
Sapienza University of Rome,University of Plymouth,TU Delft |
Modeling, Control, and Learning for Soft Robots |
| Statics and Dynamics of Continuum Robots Based on Cosserat Rods and Optimal Control Theories |
Frédéric Boyer, Vincent Lebastard, Fabien Candelier, Federico Renda, Mazen Alamir |
IMT atlantique,Université Aix Marseille,Khalifa University of Science and Technology,LAG |
Modeling, Control, and Learning for Soft Robots |
| Robotic Fiber Threading from a Gel-Like Substance Based on Impedance Control with Force Tracking |
Houari Bettahar, P. A. Diluka Harischandra, Quan Zhou |
Aalto university,Aalto University |
Modeling, Control, and Learning for Soft Robots |
| Overload Clutch with Integrated Torque Sensing and Decoupling Detection for Collision Tolerant Hybrid High-Speed Industrial Cobots |
Frederik Ostyn, Bram Vanderborght, Guillaume Crevecoeur |
Ghent University,VUB |
Compliant Mechanisms |
| A Micro Aircraft with Passive Variable-Sweep Wings |
Songnan Bai, Runze Ding, Pakpong Chirarattananon |
City University of Hong Kong,CITY UNIVERSITY OF HONGKONG |
Compliant Mechanisms |
| Design and Voluntary Control of Variable Stiffness Exoskeleton Based on sEMG Driven Model |
Yanghui Zhu, Qingcong Wu, Bai Chen, Ziyue Zhao |
Nanjing University of Aeronautics and Astronautics |
Compliant Mechanisms |
| A Robotic Torso Joint with Adjustable Linear Spring Mechanism for Natural Dynamic Motions in a Differential-Elastic Arrangement |
Jens Reinecke, Alexander Dietrich, Anton Shu, Bastian Deutschmann, Marco Hutter |
DLR,German Aerospace Center (DLR),German Aerospace Center,ETH Zurich |
Compliant Mechanisms |
| Requirements on the Spatial Distribution of Elastic Components Used in Compliance Realization |
Shuguang Huang, Joseph Schimmels |
Marquette University |
Compliant Mechanisms |
| A Novel Metamorphic Foot Mechanism with Toe Joints Based on Spring-Loaded Linkages |
Jianwei Sun, Zhenyu Wang, Meiling Zhang, Songyu Zhang, Zhihui Qian, Jinkui Chu |
Changchun University of Technology,Jilin University,Dalian University of Technology |
Compliant Mechanisms |
| Haptic-Based and SE(3)-Aware Object Insertion Using Compliant Hands |
Osher Azulay, Maxim Monastirsky, Avishai Sintov |
Tel Aviv University,Tel-Aviv University |
Compliant Mechanisms |
| Dynamic Modeling and Performance Analysis for a Wire-Driven Elastic Robotic Fish |
Xiaocun Liao, Chao Zhou, Qianqian Zou, Jian Wang, Ben Lu |
Institute of Automation, Chinese Academy of Sciences,Chinese Academy of Sciences,Institution of Automation, Chinese Academy of sciences |
Compliant Mechanisms |
| A 2-Degree-Of-Freedom Quasi-Passive Prosthetic Wrist with Two Levels of Compliance |
Leonardo Cappello, Daniele D’accolti, Marta Gherardini, Marco Controzzi, Christian Cipriani |
Scuola Superiore Sant’Anna,The Biorobotics Institute, Sant’Anna School of Advanced Studies |
Compliant Mechanisms |
| DiffCo: Auto-Differentiable Proxy Collision Detection with Multi-Class Labels for Safety-Aware Trajectory Optimization |
Yuheng Zhi, Nikhil Das, Michael Yip |
University of California, San Diego,UCSD |
Path Planning and Collision Avoidance |
| Risk-Aware Submodular Optimization for Multi-Robot Coordination |
Lifeng Zhou, Pratap Tokekar |
Drexel University,University of Maryland |
Path Planning and Collision Avoidance |
| Risk-Aware Fast Trajectory Planner for Uncertain Environments Based on Probabilistic Surrogate Reliability and Risk Contours |
Guobiao Wang |
Southeast university |
Path Planning and Collision Avoidance |
| Collision Avoidance among Dense Heterogeneous Agents Using Deep Reinforcement Learning |
Kai Zhu, Bin Li, Wen Ming Zhe, Tao Zhang |
Tsinghua University,JD |
Path Planning and Collision Avoidance |
| Maximum-Entropy Multi-Agent Dynamic Games: Forward and Inverse Solutions |
Negar Mehr, Mingyu Wang, Maulik Bhatt, Mac Schwager |
University of Illinois Urbana-Champaign,Stanford University |
Path Planning and Collision Avoidance |
| Distributing Collaborative Multi-Robot Planning with Gaussian Belief Propagation |
Aalok Patwardhan, Riku Murai, Andrew J Davison |
Imperial College London |
Path Planning and Collision Avoidance |
| Interactive Multi-Modal Motion Planning with Branch Model Predictive Control |
Yuxiao Chen, Ugo Rosolia, Wyatt Ubellacker, Noel Csomay-Shanklin, Aaron Ames |
Nvidia research,Caltech,California Institute of Technology |
Path Planning and Collision Avoidance |
| A Sequential MPC Approach to Reactive Planning for Bipedal Robots Using Safe Corridors in Highly Cluttered Environments |
Kunal Sanjay Narkhede, Abhijeet Kulkarni, Dhruv Ashwinkumar Thanki, Ioannis Poulakakis |
University of Delaware |
Path Planning and Collision Avoidance |
| Towards a Continuous Solution of the D-Visibility Watchman Route Problem in a Polygon with Holes |
Jan Mikula, Miroslav Kulich |
Faculty of Electrical Engineering – Czech Technical University in Prague,Czech Technical University in Prague |
Path Planning and Collision Avoidance |
| Learning Deep Neural Network Controller for Path Following of Unicycle Robots |
Priyabrata Saha, Luis Guerrero-bonilla, Magnus Egerstedt, Saibal Mukhopadhyay |
Georgia Institute of Technology,Instituto Tecnologico y de Estudios Superiores de Monterrey,University of California, Irvine |
Deep Learning and Neural Networks in Robotics |
| ViewBirdiformer: Learning to Recover Ground-Plane Crowd Trajectories and Ego-Motion from a Single Ego-Centric View |
Mai Nishimura, Shohei Nobuhara, Ko Nishino |
OMRON SINIC X,Kyoto University |
Deep Learning and Neural Networks in Robotics |
| Closing the Planning-Learning Loop with Application to Autonomous Driving |
Panpan Cai, David Hsu |
Shanghai Jiao Tong University,National University of Singapore |
Deep Learning and Neural Networks in Robotics |
| Learning from Demonstrations Via Multi-Level and Multi-Attention Domain-Adaptive Meta-Learning |
Ziye Hu, Zhongxue Gan, Wei Li, Weikun Guo, Xiang Gao, Jiwei Zhu |
Fudan University,Jihua Lab |
Deep Learning and Neural Networks in Robotics |
| Learning Stable Vector Fields on Lie Groups |
Julen Urain, Davide Tateo, Jan Peters |
TU Darmstadt,Technische Universität Darmstadt |
Deep Learning and Neural Networks in Robotics |
| Learning to Play Table Tennis from Scratch Using Muscular Robots |
Dieter Buechler, Simon Guist, Roberto Calandra, Vincent Berenz, Bernhard Schölkopf, Jan Peters |
Max Planck Institute for Intelligent Systems Tübingen,Max Planck Institute for Intelligent Systems,Meta AI,Technische Universität Darmstadt |
Deep Learning and Neural Networks in Robotics |
| Particle Filters in Latent Space for Robust Deformable Linear Object Tracking |
Yuxuan Yang, Johannes A. Stork, Todor Stoyanov |
Örebro University,Orebro University |
Deep Learning and Neural Networks in Robotics |
| Multi-Scale Interaction for Real-Time LiDAR Data Segmentation on an Embedded Platform |
Shijie Li, Xieyuanli Chen, Yun Liu, Dengxin Dai, Cyrill Stachniss, Juergen Gall |
Bonn University,National University of Defense Technology,Agency for Science, Technology and Research (A*STAR),ETH Zurich,University of Bonn |
Deep Learning and Neural Networks in Robotics |
| Stable Neural Adaptive Filters for Teleoperations with Uncertain Delays |
Parham Kebria, Abbas Khosravi, Saeid Nahavandi |
Deakin University |
Deep Learning and Neural Networks in Robotics |
| Compliant Microgripper Using Soft Polymer Actuator |
Jung-Hwan Youn, Je-Sung Koh, Ki-Uk Kyung |
Electronics and Telecommunications Research Institute (ETRI),Ajou University,Korea Advanced Institute of Science & Technology (KAIST) |
Soft Robots II |
| Development of Hydraulically-Driven Soft Hand for Handling Heavy Vegetables and Its Experimental Evaluation |
Osamu Azami, Kyosuke Ishibashi, Mitsuo Komagata, Ko Yamamoto |
Tokyo University,The University of Tokyo,University of Tokyo |
Soft Robots II |
| Two-Stage Grasping: A New Bin Picking Framework for Small Objects |
Hanwen Cao, Jianshu Zhou, Yichuan Li, Rui Cao, Qi Dou, Yunhui Liu |
The Chinese University of Hong Kong,Chinese University of Hong Kong |
Soft Robots II |
| Electroadhesive Auxetics As Programmable Layer Jamming Skins for Formable Crust Shape Displays |
Ahad Rauf, John Settimio Bernardo, Sean Follmer |
Stanford University |
Soft Robots II |
| Navigating Soft Robots through Wireless Heating |
Yiwen Song, Mason Zadan, Kushaan Misra, Zefang Li, Jingxian Wang, Carmel Majidi, Swarun Kumar |
Carnegie Mellon University,Microsoft & National University of Singapore |
Soft Robots II |
| Fast Untethered Soft Robotic Crawler with Elastic Instability |
Zechen Xiong, Yufeng Su, Hod Lipson |
Columbia University,Columbia university |
Soft Robots II |
| An Underwater Jet-Propulsion Soft Robot with High Flexibility Driven by Water Hydraulics |
Siqing Chen, He Xu, Xiong Xiao, Ben Lu |
Harbin Engineering University,College of Mechanical and Electrical Engineering, Harbin Enginee,Institute of Automation, Chinese Academy of Sciences |
Soft Robots II |
| Force/Torque Sensing for Soft Grippers Using an External Camera |
Jeremy Collins, Patrick Grady, Charlie Kemp |
Georgia Institute of Technology |
Soft Robots II |
| Data-Driven Spectral Submanifold Reduction for Nonlinear Optimal Control of High-Dimensional Robots |
John Irvin Alora, Mattia Cenedese, Edward Schmerling, George Haller, Marco Pavone |
Stanford University,ETH Zürich,ETH Zurich |
Modelling and Control |
| Control of Shape Memory Alloy Actuator Via Electrostatic Capacitive Sensor for Meso-Scale Mirror Tilting System |
Baekgyeom Kim, Doohoe Lee, Dongjin Kim, Seungyong Han, Daeshik Kang, Uikyum Kim, Je-Sung Koh |
Ajou University |
Modelling and Control |
| Data-Efficient Non-Parametric Modelling and Control of an Extensible Soft Manipulator |
Mohammadreza Kasaei, Keyhan Kouhkiloui Babarahmati, Zhibin Li, Mohsen Khadem |
University of Edinburgh,University College London |
Modelling and Control |
| Analytical Approach to Inverse Kinematics of Single Section Mobile Continuum Manipulators |
Audrey Hyacinthe Bouyom Boutchouang, Achille Melingui, Joseph Jean-baptiste Mvogo Ahanda, Xinrui Yang, Othman Lakhal, Frederic Biya Motto, Rochdi Merzouki |
University of Yaounde I,Higher Technical Teacher Training collage, University of Bame,University of Lille,University Lille, CRIStAL, CNRS-UMR ,CRIStAL, CNRS UMR , University of Lille, |
Modelling and Control |
| A Fast Geometric Framework for Dynamic Cosserat Rods with Discrete Actuated Joints |
Hossain Samei, Robin Chhabra |
Carleton University |
Modelling and Control |
| Data-Driven Estimation of Forces Along the Backbone of Concentric Tube Continuum Robots |
Heiko Donat, Pouya Mohammadi, Jochen Steil |
Technische Universität Braunschweig |
Modelling and Control |
| Bootstrapping the Dynamic Gait Controller of the Soft Robot Arm |
Rudolf Szadkowski, Muhammad Sunny Nazeer, Matteo Cianchetti, Egidio Falotico, Jan Faigl |
Czech Technical University in Prague,The BioRobotics Institute, Scuola Superiore Sant’Anna,Scuola Superiore Sant’Anna |
Modelling and Control |
| Model Based Position Control of Soft Hydraulic Actuators |
Mark Runciman, Enrico Franco, James Avery, Ferdinando Rodriguez Y Baena, George Mylonas |
Imperial College London,Imperial College, London, UK |
Modelling and Control |
| Multiple Surgical Instruments Tracking-By-Prediction with Graph Hierarchy |
Rui Guo, Xi Liu, Ziheng Wang, Tony Jarc |
Intuitive Surgical |
Medical Imaging and Perception I |
| Fully Robotized 3D Ultrasound Image Acquisition for Artery |
Mingcong Chen, Yuanrui Huang, Jian Chen, Tongxi Zhou, Jiuan Chen, Hongbin Liu |
Institute of Automation Chinese Academy of Sciences,University of Chinese Academy of Sciences,Institute of Automation, Chinese Academy of Sciences,institute of Automation, Chinese Academy of Sciences,Institute of Automation,Chinese Academy of Sciences |
Medical Imaging and Perception I |
| Depth Estimation for Oral Cavity by Shape from Shading with Endoscope |
Xi Wu, Gangtie Zheng |
Tsinghua University |
Medical Imaging and Perception I |
| Dynamic Interactive Relation Capturing Via Scene Graph Learning for Robotic Surgical Report Generation |
Hongqiu Wang, Yueming Jin, Lei Zhu |
Hong Kong University of Science and Technology (Guangzhou),University College London,The Hong Kong University of Science and Technology (Guangzhou) |
Medical Imaging and Perception I |
| Reslicing Ultrasound Images for Data Augmentation and Vessel Reconstruction |
Cecilia Morales, Jason Yao, Tejas Rane, Robert Edman, Howie Choset, Artur Dubrawski |
Carnege Mellon University,Carnegie Mellon University |
Medical Imaging and Perception I |
| Expert-Agnostic Ultrasound Image Quality Assessment Using Deep Variational Clustering |
Deepak Raina, Dimitrios Ntentia, Sh Chandrashekhara, Richard Voyles, Subir Kumar Saha |
Indian Institute of Technology Delhi and Purdue University USA,Purdue university,All India Insititute of Medical Sciences, New Delhi,Purdue University,Indain Institute of Technology Delhi |
Medical Imaging and Perception I |
| A Curvature and Trajectory Optimization-Based 3D Surface Reconstruction Pipeline for Ultrasound Trajectory Generation |
Ananya Bal, Ashutosh Gupta, Fnu Abhimanyu, John Galeotti, Howie Choset |
Carnegie Mellon University,BITS Pilani KK Birla Goa campus |
Medical Imaging and Perception I |
| Graph-Based Pose Estimation of Texture-Less Surgical Tools for Autonomous Robot Control |
HAOZHENG XU, Mark Runciman, João Cartucho, Chi Xu, Stamatia Giannarou |
Imperial college london,Imperial College London |
Medical Imaging and Perception I |
| Adaptive Sampling-Based Particle Filter for Visual-Inertial Gimbal in the Wild |
Xueyang Kang, Ariel Herrera, Henry Lema, Esteban Valencia, Patrick Vandewalle |
KU Leuven,Escuela Politécnica Nacional,Escuela Politecnica Nacional |
Sensor Fusion II |
| DAMS-LIO: A Degeneration-Aware and Modular Sensor-Fusion LiDAR-Inertial Odometry |
Fuzhang Han, Han Zheng, Wenjun Huang, Rong Xiong, Yue Wang, Yanmei Jiao |
Zhejiang University,Hangzhou Normal University |
Sensor Fusion II |
| ImmFusion: Robust mmWave-RGB Fusion for 3D Human Body Reconstruction in All Weather Conditions |
Anjun Chen, Xiangyu Wang, Kun Shi, Shaohao Zhu, Bin Fang, Yingfeng Chen, Jiming Chen, Yuchi Huo, Qi Ye |
Zhejiang University,Tsinghua university,Netease Inc |
Sensor Fusion II |
| Simple-BEV: What Really Matters for Multi-Sensor BEV Perception? |
Adam Harley, Zhaoyuan Fang, Jie Li, Rares Ambrus, Aikaterini Fragkiadaki |
Stanford University,Carnegie Mellon University,Toyota Research Institute |
Sensor Fusion II |
| MVFusion: Multi-View 3D Object Detection with Semantic-Aligned Radar and Camera Fusion |
Zizhang Wu, Guilian Chen, Yuanzhu Gan, Wang Robin, Jian Pu |
Zongmu Technology,Fudan University |
Sensor Fusion II |
| BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation |
Zhijian Liu, Haotian Tang, Alexander Amini, Xinyu Yang, Huizi Mao, Daniela Rus, Song Han |
MIT,Massachusetts Institute of Technology,Shanghai Jiao Tong University,OmniML |
Sensor Fusion II |
| Fusing Event-Based Camera and Radar for SLAM Using Spiking Neural Networks with Continual STDP Learning |
Ali Safa, Tim Verbelen, Ilja Ocket, André Bourdoux, Hichem Sahli, Catthoor Francky, Georges Gielen |
KU Leuven - IMEC,Ghent University - imec,imec - KU Leuven,imec,Vrije Universiteit Brussel |
Sensor Fusion II |
| AI-Based Multi-Object Relative State Estimation with Self-Calibration Capabilities |
Thomas Jantos, Christian Brommer, Eren Allak, Stephan Weiss, Jan Steinbrener |
University of Klagenfurt,Universität Klagenfurt |
Sensor Fusion II |
| Are All Point Clouds Suitable for Completion? Weakly Supervised Quality Evaluation Network for Point Cloud Completion |
Jieqi Shi, Peiliang Li, Xiaozhi Chen, Shaojie Shen |
Hong Kong University of Technology and Science,HKUST, Robotics Institute,DJI,Hong Kong University of Science and Technology |
Point Clouds |
| From Semi-Supervised to Omni-Supervised Room Layout Estimation Using Point Clouds |
Huan-ang Gao, Beiwen Tian, Pengfei Li, Xiaoxue Chen, Hao Zhao, Guyue Zhou, Yurong Chen, Hongbin Zha |
Tsinghua University,Institute for AI Industry Research (AIR), Tsinghua University,Intel,Peking University |
Point Clouds |
| Few-Shot Point Cloud Semantic Segmentation Via Contrastive Self-Supervision and Multi-Resolution Attention |
Jiahui Wang, Haiyue Zhu, Haoren Guo, Abdullah Al Mamun, Cheng Xiang, Tong Heng Lee |
National University of Singapore,Agency for Science, Technology and Research (A*STAR) |
Point Clouds |
| Scene-Level Point Cloud Colorization with Semantics-And-Geometry-Aware Networks |
Rongrong Gao, Tian-zhu Xiang, Chenyang Lei, Jaesik Park, Qifeng Chen |
HongKong university of science and engineering,Inception Institute of Artificial Intelligence,HKUST,POSTECH |
Point Clouds |
| Deep Interactive Full Transformer Framework for Point Cloud Registration |
Guangyan Chen, Meiling Wang, Qingxiang Zhang, Li Yuan, Tong Liu, Yufeng Yue |
Beijing Institute of technology,Beijing Institute of Technology,Peking University |
Point Clouds |
| Coarse-To-Fine Point Cloud Registration with SE(3)-Equivariant Representations |
Cheng-wei Lin, Tung-i Chen, Hsin-ying Lee, Wen-chin Chen, Winston Hsu |
National Taiwan University |
Point Clouds |
| LiDAR-SGM: Semi-Global Matching on LiDAR Point Clouds and Their Cost-Based Fusion into Stereo Matching |
Bianca Forkel, Hans J Wuensche |
Universität der Bundeswehr München |
Point Clouds |
| Segregator: Global Point Cloud Registration with Semantic and Geometric Cues |
Pengyu Yin, Shenghai Yuan, Cao Haozhi, Xingyu Ji, Shuyang Zhang, Lihua Xie |
Nanyang Technological University,NANYANG TECHNOLOGICAL UNIVERSITY,The Hong Kong University of Science and Technology,NanyangTechnological University |
Point Clouds |
| StereoPose: Category-Level 6D Transparent Object Pose Estimation from Stereo Images Via Back-View NOCS |
Kai Chen, Stephen James, Congying Sui, Yunhui Liu, Pieter Abbeel, Qi Dou |
The Chinese University of Hong Kong,Dyson,Chinese University of Hong Kong,UC Berkeley |
Pose Estimation |
| Non-Minimal Solvers for Relative Pose Estimation with a Known Relative Rotation Angle |
Deshun Hu |
Harbin Institute of Technology |
Pose Estimation |
| Generalizable Pose Estimation Using Implicit Scene Representations |
Vaibhav Saxena, Kamal Rahimi Malekshan, Linh Tran, Yotto Koga |
Georgia Institute of Technology,Autodesk |
Pose Estimation |
| RFFCE: Residual Feature Fusion and Confidence Evaluation Network for 6DoF Pose Estimation |
Qiwei Meng, Shanshan Ji, Shiqiang Zhu, Tianlei Jin, Te Li, Jianjun Gu, Wei Song |
Zhejiang Lab,zhejiang lab |
Pose Estimation |
| Hierarchical Graph Neural Networks for Proprioceptive 6D Pose Estimation of In-Hand Objects |
Alireza Rezazadeh, Snehal Dikhale, Soshi Iba, Nawid Jamali |
University of Minnesota,Honda Research Institute USA |
Pose Estimation |
| Interactive Object Segmentation in 3D Point Clouds |
Theodora Kontogianni, Ekin Celikkan, Siyu Tang, Konrad Schindler |
ETH Zurich,RWTH Aachen University,ETH Zürich |
Pose Estimation |
| GSNet: Model Reconstruction Network for Category-Level 6D Object Pose and Size Estimation |
Penglei Liu, Qieshi Zhang, Jun Cheng |
Shenzhen College of Advanced Technology, University of Chinese Academy of Sciences,Shenzhen Institutes of Advanced Technology, Chinese Academy of S,Shenzhen Institutes of Advanced Technology |
Pose Estimation |
| 6D Pose Estimation for Textureless Objects on RGB Frames Using Multi-View Optimization |
Jun Yang, Wenjie Xue, Sahar Ghavidel, Steven Lake Waslander |
University of Toronto,Epson Canada |
Pose Estimation |
| Learning Stabilization Control from Observations by Learning Lyapunov-Like Proxy Models |
Milan Ganai, Chiaki Hirayama, Ya-Chien Chang, Sicun Gao |
University of California San Diego,UCSD |
Imitation Learning |
| Efficient Preference-Based Reinforcement Learning Using Learned Dynamics Models |
Yi Liu, Gaurav Datta, Ellen Novoseller, Daniel Brown |
UC Berkeley,University of California, Berkeley,University of Utah |
Imitation Learning |
| BITS: Bi-Level Imitation for Traffic Simulation |
Danfei Xu, Yuxiao Chen, Boris Ivanovic, Marco Pavone |
Stanford Univesity,Nvidia research,NVIDIA,Stanford University |
Imitation Learning |
| Off-Policy Imitation Learning from Visual Inputs |
Zhihao Cheng, Li Shen, Dacheng Tao |
The University of Sydney,JD Explore Academy |
Imitation Learning |
| Versatile Skill Control Via Self-Supervised Adversarial Imitation of Unlabeled Mixed Motions |
Chenhao Li, Sebastian Blaes, Pavel Kolev, Marin Vlastelica, Jonas Frey, Georg Martius |
ETH Zürich,Max Planck Institute for Intelligent Systems,ETH Zurich |
Imitation Learning |
| Curriculum-Based Imitation of Versatile Skills |
Maximilian Xiling Li, Onur Celik, Philipp Becker, Denis Blessing, Rudolf Lioutikov, Gerhard Neumann |
Karlsruhe Institute of Technology,KIT,Karlsruhe Institute of Technology (KIT) |
Imitation Learning |
| Learning Stable Dynamics Via Iterative Quadratic Programming |
Paul Gesel, Momotaz Begum |
University of New Hampshire |
Imitation Learning |
| Holistic Graph-Based Motion Prediction |
Daniel Grimm, Philip Schörner, Moritz Dreßler, Johann Marius Zöllner |
FZI Research Center for Information Technology,Karlsruhe Institute of Technology (KIT),FZI Forschungszentrum Informatik |
Imitation Learning |
| Extraneousness-Aware Imitation Learning |
Ray Chen Zheng, Kaizhe Hu, Zhecheng Yuan, Boyuan Chen, Huazhe Xu |
Tsinghua University,Massachusetts Institute of Technology |
Imitation Learning |
| Wayformer: Motion Forecasting Via Simple & Efficient Attention Networks |
Nigamaa Nayakanti, Rami Al-rfou, Aurick Zhou, Kratarth Goel, Khaled Refaat, Benjamin Sapp |
Waymo |
Imitation Learning |
| A Non-Parametric Skill Representation with Soft Null Space Projectors for Fast Generalization |
João Silvério, Yanlong Huang |
German Aerospace Center,University of Leeds |
Imitation Learning |
| Sample Efficient Dynamics Learning for Symmetrical Legged Robots: Leveraging Physics Invariance and Geometric Symmetries |
Jee-Eun Lee, Jaemin Lee, Tirthankar Bandyopadhyay, Luis Sentis |
The University of Texas at Austin,California Institute of Technology,CSIRO |
Learning for Control II |
| Just Round: Quantized Observation Spaces Enable Memory Efficient Learning of Dynamic Locomotion |
Lev Grossman, Brian Plancher |
Berkshire Grey,Barnard College, Columbia University |
Learning for Control II |
| Causal Inference for De-Biasing Motion Estimation from Robotic Observational Data |
Junhong Xu, Kai Yin, Jason M. Gregory, Lantao Liu |
Indiana University,Expedia Group,US Army Research Laboratory |
Learning for Control II |
| Active Predictive Coding: Brain-Inspired Reinforcement Learning for Sparse Reward Robotic Control Problems |
Alex Ororbia, Ankur Mali |
Rochester Institute of Technology,University of South Florida |
Learning for Control II |
| Approximating Discontinuous Nash Equilibrial Values of Two-Player General-Sum Differential Games |
Lei Zhang, Mukesh Ghimire, Wenlong Zhang, Zhe Xu, Yi Ren |
Arizona State University |
Learning for Control II |
| Visual Affordance Prediction for Guiding Robot Exploration |
Homanga Bharadhwaj, Abhinav Gupta, Shubham Tulsiani |
Carnegie Mellon University |
Learning for Control II |
| Generating Stable and Collision-Free Policies through Lyapunov Function Learning |
Alexandre Coulombe, Hsiu-Chin Lin |
McGill University |
Learning for Control II |
| ALAN: Autonomously Exploring Robotic Agents in the Real World |
Russell Mendonca, Shikhar Bahl, Deepak Pathak |
Carnegie Mellon University,UC Berkeley |
Learning for Control II |
| Throwing Objects into a Moving Basket While Avoiding Obstacles |
Hamidreza Kasaei, Mohammadreza Kasaei |
University of Groningen,University of Edinburgh |
Learning for Control II |
| AIMY: An Open-Source Table Tennis Ball Launcher for Versatile and High-Fidelity Trajectory Generation |
Alexander Dittrich, Jan Schneider, Simon Guist, Nico Gürtler, Heiko Ott, Thomas Steinbrenner, Bernhard Schölkopf, Dieter Buechler |
Max Planck Institute for Intelligent Systems, Tübingen, Germany,Max Planck Institute for Intelligent Systems,Max Planck Institute for Intelligent Systems Tübingen,MPI for Intelligent Systems |
Learning for Control II |
| Data-Efficient Characterization of the Global Dynamics of Robot Controllers with Confidence Guarantees |
Ewerton Vieira, Aravind Sivaramakrishnan, Yao Song, Edgar Granados, Marcio Gameiro, Konstantin Mischaikow, Ying Hung, Kostas E. Bekris |
Rutgers University,Rutgers,Rutgers, the State University of New Jersey |
Learning for Control II |
| Modeling and Inertial Parameter Estimation of Cart-Like Nonholonomic Systems Using a Mobile Manipulator |
Sergio Aguilera, Muhammad Ali Murtaza, Jonathan Rogers, Seth Hutchinson |
Georgia Institute of Technology |
Learning for Control II |
| Using Registration with Fourier-SOFT in 2D (FS2D) for Robust Scan Matching of Sonar Range Data |
Tim Hansen, Andreas Birk |
Constructor University,Jacobs University |
Marine Robotics II |
| A Robotic Cooperative Network for Localising a Submarine in Distress: Results from REPMUS21 |
Gabriele Ferri, Alessandro Faggiani, Roberto Petroccia, Pietro Stinco, Alessandra Tesei |
NATO Centre for Maritime Research and Experimentation,CMRE,NATO Ctr. on Maritime Research and Experimentation (CMRE),NATO STO CMRE |
Marine Robotics II |
| DeepSeeColor: Realtime Adaptive Color Correction for Autonomous Underwater Vehicles Via Deep Learning Methods |
Stewart Jamieson, Jonathan Patrick How, Yogesh Girdhar |
Massachusetts Institute of Technology,Woods Hole Oceanographic Institution |
Marine Robotics II |
| From Concept to Field Tests: Accelerated Development of Multi-AUV Missions Using a High-Fidelity Faster-Than-Real-Time Simulator |
Tim Player, Arjo Chakravarty, Mabel Zhang, Ben Yair Raanan, Brian Kieft, Yanwu Zhang, Brett Hobson |
Oregon State University,Open Robotics, Singapore University of Science and Technology,Open Robotics team at Intrinsic,Monterey Bay Aquarium Research Institute,MBARI |
Marine Robotics II |
| Deep Reinforcement Learning Based Tracking Control of an Autonomous Surface Vessel in Natural Waters |
Wei Wang, Xiaojing Cao, Alejandro Gonzalez-garcia, Lianhao Yin, Niklas Hagemann, Yuanyuan Qiao, Carlo Ratti, Daniela Rus |
Massachusetts Institute of Technology,Beijing University of Posts and Telecommunications,KU Leuven,MIT |
Marine Robotics II |
| UDepth: Fast Monocular Depth Estimation for Visually-Guided Underwater Robots |
Boxiao Yu, Jiayi Wu, Md Jahidul Islam |
University of Florida |
Marine Robotics II |
| Improved Benthic Classification Using Resolution Scaling and SymmNet Unsupervised Domain Adaptation |
Heather Doig, Oscar Pizarro, Stefan Bernard Williams |
University of Sydney,Australian Centre for Field Robotics |
Marine Robotics II |
| Data-Driven Loop Closure Detection in Bathymetric Point Clouds for Underwater SLAM |
Jiarui Tan, Ignacio Torroba Balmori, Yiping Xie, John Folkesson |
KTH Royal Institute of Technology,KTH |
Marine Robotics II |
| ResiPlan: Closing the Planning-Acting Loop for Safe Underwater Navigation |
Marios Xanthidis, Eleni Kelasidi, Kostas Alexis |
SINTEF Ocean,NTNU - Norwegian University of Science and Technology |
Marine Robotics II |
| Diver Interest Via Pointing: Human-Directed Object Inspection for AUVs |
Chelsey Edge, Junaed Sattar |
University of Minnesota-Twin Cities,University of Minnesota |
Marine Robotics II |
| Robust Uncertainty Estimation for Classification of Maritime Objects |
Jonathan Becktor, Frederik Scholler, Evangelos Boukas, Lazaros Nalpantidis |
Techincal University of Denmark,Technical University of Denmark |
Marine Robotics II |
| Adaptive Heading for Perception-Aware Trajectory Following |
Jonatan Scharff Willners, Sean Katagiri, Shida Xu, Tomasz Luczynski, Joshua Roe, Y. R. Petillot |
Heriot-Watt University,Imperial College London |
Marine Robotics II |
| An Optimal Open-Loop Strategy for Handling a Flexible Beam with a Robot Manipulator |
shamilmamedov, Alejandro Astudillo, Daniele Ronzani, Wilm Decré, Jean-philippe Noël, Jan Swevers |
KU Leuven,Katholieke Universiteit Leuven |
Optimization and Optimal Control |
| Constraint Manifolds for Robotic Inference and Planning |
Yetong Zhang, Fan Jiang, Gerry Chen, Varun Agrawal, Adam Rutkowski, Frank Dellaert |
Georgia Institute of Technology,Air Force Research Laboratory |
Optimization and Optimal Control |
| Model Predictive Optimized Path Integral Strategies |
Dylan M. Asmar, Ransalu Senanayake, Shawn Manuel, Mykel Kochenderfer |
Stanford University |
Optimization and Optimal Control |
| Real-Time Solutions to Multimodal Partially Observable Dynamic Games |
Oswin So, Paul Drews, Thomas Balch, Velin Dimitrov, Guy Rosman, Evangelos Theodorou |
Massachusetts Institute of Technology,Toyota Research Institute,Georgia Institute of Technology |
Optimization and Optimal Control |
| Autonomous Drone Racing: Time-Optimal Spatial Iterative Learning Control within a Virtual Tube |
Shuli Lv, Yan Gao, Jiaxing Che, Quan Quan |
Beihang University,School of Automation Science and Electrical Engineering, Beihang |
Optimization and Optimal Control |
| Curvature-Aware Model Predictive Contouring Control |
Lorenzo Lyons, Laura Ferranti |
Delft University of Technology |
Optimization and Optimal Control |
| A Sequential Quadratic Programming Approach to the Solution of Open-Loop Generalized Nash Equilibria |
Edward Zhu, Francesco Borrelli |
University of California, Berkeley |
Optimization and Optimal Control |
| RPGD: A Small-Batch Parallel Gradient Descent Optimizer with Explorative Resampling for Nonlinear Model Predictive Control |
Frederik Heetmeyer, Marcin Paluch, Diego Bolliger, Florian Bolli, Xiang Deng, Ennio Filicicchia, Tobi Delbruck |
ETH Zurich,University of Zurich,Univ. of Zurich & ETH Zurich |
Optimization and Optimal Control |
| Distributionally Robust Optimization with Unscented Transform for Learning-Based Motion Control in Dynamic Environments |
Astghik Hakobyan, Insoon Yang |
Seoul National University |
Optimization and Optimal Control |
| Event-Triggered Optimal Formation Tracking Control Using Reinforcement Learning for Large-Scale UAV Systems |
Ziwei Yan, Liang Han, Xiaoduo Li, Jinjie Li, Zhang Ren |
Beihang University,Shanghai Jiao Tong University,Beihang Unviersity |
Optimization and Optimal Control |
| Differentiable Collision Detection: A Randomized Smoothing Approach |
Louis Montaut, Quentin Le Lidec, Antoine Bambade, Vladimír Petrík, Josef Sivic, Justin Carpentier |
INRIA (Paris) - CIIRC (Prague),INRIA-ENS-PSL,INRIA Paris, ENPC France,Czech Technical University in Prague,Czech Technical University,INRIA |
Optimization and Optimal Control |
| Start State Selection for Control Policy Learning from Optimal Trajectories |
Christoph Zelch, Jan Peters, Oskar Von Stryk |
Technische Universität Darmstadt |
Optimization and Optimal Control |
| Swarm-LIO: Decentralized Swarm LiDAR-Inertial Odometry |
Fangcheng Zhu, Yunfan Ren, Fanze Kong, Huajie Wu, Siqi Liang, Nan Chen, Wei Xu, Fu Zhang |
The University of Hong Kong,Hong Kong University,Harbin Institute of Technology, Shenzhen,University of Hong Kong |
Aerial Robotics II |
| HALO: Hazard-Aware Landing Optimization for Autonomous Systems |
Christopher Hayner, Samuel Buckner, Daniel Broyles, Evelyn Madewell, Karen Yan Ming Leung, Behcet Acikmese |
University of Washington,Stanford University, NVIDIA Research, University of Washington |
Aerial Robotics II |
| Onboard Controller Design for Nano UAV Swarm in Operator-Guided Collective Behaviors |
Tugay Alperen Karagüzel, Victor Retamal Guiberteau, Eliseo Ferrante |
Vrije Universiteit Amsterdam |
Aerial Robotics II |
| EFTrack: A Lightweight Siamese Network for Aerial Object Tracking |
Wenqi Zhang, Yuan Yao, Xincheng Liu, Kai Kou, Gang Yang |
Northwestern Polytechnical University |
Aerial Robotics II |
| Active Metric-Semantic Mapping by Multiple Aerial Robots |
Xu Liu, Ankit Prabhu, Fernando Cladera, Ian Douglas Miller, Lifeng Zhou, Camillo Jose Taylor, Vijay Kumar |
University of Pennsylvania,Drexel University |
Aerial Robotics II |
| Multi-Target Pursuit by a Decentralized Heterogeneous UAV Swarm Using Deep Multi-Agent Reinforcement Learning |
Maryam Kouzehgar, Youngbin Song, Malika Meghjani, Roland Bouffanais |
Singapore University of Technology and Design,University of Ottawa |
Aerial Robotics II |
| A Moving Target Tracking System of Quadrotors with Visual-Inertial Localization |
Ziyue Lin, Wenbo Xu, Wei Wang |
Institute of Automation, Chinese Academy of Sciences |
Aerial Robotics II |
| BogieCopter: A Multi-Modal Aerial-Ground Vehicle for Long-Endurance Inspection Applications |
Teodoro Dias, Meysam Basiri |
Instituto Superior Técnico |
Aerial Robotics II |
| Towards Autonomous UAV Railway DC Line Recharging: Design and Simulation |
Frederik Falk Nyboe, Nicolaj Malle, Gerd Vom Bögel, Linda Cousin, Thomas Heckel, Konstantin Troidl, Anders Schack Madsen, Emad Samuel Malki Ebeid |
University of Southern Denmark,Fraunhofer IMS,Fraunhofer IISB |
Perception |
| Fast Region of Interest Proposals on Maritime UAVs |
Benjamin Kiefer, Andreas Zell |
University of Tuebingen,University of Tübingen |
Perception |
| TRADE: Object Tracking with 3D Trajectory and Ground Depth Estimates for UAVs |
Pedro Proença, Patrick Spieler, Robert Hewitt, Jeff Delaune |
NASA-JPL,JPL,Jet Propulsion Laboratory |
Perception |
| Adaptive Keyframe Generation Based LiDAR Inertial Odometry for Complex Underground Environments |
Boseong Kim, Chanyoung Jung, David Hyunchul Shim, Ali-Akbar Agha-Mohammadi |
KAIST,NASA-JPL, Caltech |
Perception |
| Finding Things in the Unknown: Semantic Object-Centric Exploration with an MAV |
Sotirios Papatheodorou, Nils Funk, Dimos Tzoumanikas, Christopher Choi, Binbin Xu, Stefan Leutenegger |
Imperial College London,University of Toronto,Technical University of Munich |
Perception |
| Stealthy Perception-Based Attacks on Unmanned Aerial Vehicles |
Amir Khazraei, Haocheng Meng, Miroslav Pajic |
Duke university,Duke University |
Perception |
| SGDViT: Saliency-Guided Dynamic Vision Transformer for UAV Tracking |
Liangliang Yao, Changhong Fu, Sihang Li, Guangze Zheng, Junjie Ye |
Tongji University |
Perception |
| Semantics-Aware Exploration and Inspection Path Planning |
Mihir Rahul Dharmadhikari, Kostas Alexis |
NTNU - Norwegian University of Science and Technology |
Perception |
| Inverted Landing in a Small Aerial Robot Via Deep Reinforcement Learning for Triggering and Control of Rotational Maneuvers |
Bryan Habas, Jack W. Langelaan, Bo Cheng |
The Pennsylvania State University,Penn State University,Pennsylvania State University |
Micro Aerial Robots |
| Heading Control of a Long-Endurance Insect-Scale Aerial Robot Powered by Soft Artificial Muscles |
Yi-Hsuan Hsiao, Suhan Kim, Zhijian Ren, Yufeng Chen |
Massachusetts Institute of Technology,Massachusetts Institute of Technology (MIT) |
Micro Aerial Robots |
| Robust, High-Rate Trajectory Tracking on Insect-Scale Soft-Actuated Aerial Robots with Deep-Learned Tube MPC |
Andrea Tagliabue, Yi-Hsuan Hsiao, Urban Fasel, J. Nathan Kutz, Steven L. Brunton, Yufeng Chen, Jonathan Patrick How |
Massachusetts Institute of Technology,Imperial College London,University of Washington |
Micro Aerial Robots |
| A New Sensation: Digital Strain Sensing for Disturbance Detection in Flapping Wing Micro Aerial Vehicles |
Regan Kubicek, Mahnoush Babaei, Alison Weber, Sarah Bergbreiter |
Carnegie Mellon University,The University of Texas at Austin,University of Washington |
Micro Aerial Robots |
| A Lightweight High-Voltage Boost Circuit for Soft-Actuated Micro-Aerial-Robots |
Zhijian Ren, Jiahui Yang, Suhan Kim, Yi-Hsuan Hsiao, Jeffrey Lang, Yufeng Chen |
Massachusetts Institute of Technology,Southern University of Science and Technology,Massachusetts Institute of Technology (MIT),MIT |
Micro Aerial Robots |
| Hummingbird-Bat Hybrid Wing by 3-D Printing |
Tomoya Fujii, Jinqiang Dang, Hiroto Tanaka |
Tokyo institute of technology,Tokyo Institute of Technology |
Micro Aerial Robots |
| Ultra-Low Power Deep Learning-Based Monocular Relative Localization Onboard Nano-Quadrotors |
Stefano Bonato, Stefano Carlo Lambertenghi, Elia Cereda, Alessandro Giusti, Daniele Palossi |
USI and SUPSI,USI, SUPSI,IDSIA USI-SUPSI,IDSIA Lugano, SUPSI,ETH Zurich |
Micro Aerial Robots |
| A Hybrid Quadratic Programming Framework for Real-Time Embedded Safety-Critical Control |
Ryan Bena, Sushmit Hossain, Buyun Chen, Wei Wu, Quan Nguyen |
University of Southern California |
Micro Aerial Robots |
| D2CoPlan: A Differentiable Decentralized Planner for Multi-Robot Coverage |
Vishnu Sharma, Lifeng Zhou, Pratap Tokekar |
University of Maryland,Drexel University |
Multi-Robot Systems II |
| Accelerating Multi-Agent Planning Using Graph Transformers with Bounded Suboptimality |
Chenning Yu, Qingbiao Li, Sicun Gao, Amanda Prorok |
University of California San Diego,The University of Cambridge,UCSD,University of Cambridge |
Multi-Robot Systems II |
| Environment Optimization for Multi-Agent Navigation |
Zhan Gao, Amanda Prorok |
University of Cambridge |
Multi-Robot Systems II |
| Heterogeneous Coverage and Multi-Resource Allocation in Supply-Constrained Teams |
Mela Coffey, Alyssa Pierson |
Boston University |
Multi-Robot Systems II |
| Sequential Stochastic Multi-Task Assignment for Multi-Robot Deployment Planning |
Colin Mitchell, Graeme Best, Geoffrey Hollinger |
Oregon State University,University of Technology Sydney |
Multi-Robot Systems II |
| Path Planning under Uncertainty to Localize mmWave Sources |
Kai Pfeiffer, Yuze Jia, Mingsheng Yin, Akshaj Kumar Veldanda, Yaqi Hu, Amee Trivedi, Jeff Jun Zhang, Siddharth Garg, Elza Erkip, Sundeep Rangan, Ludovic Righetti |
Nanyang Technological University,NYU,UBC,Yale,New York University |
Multi-Robot Systems II |
| Communication-Critical Planning Via Multi-Agent Trajectory Exchange |
Nathaniel Glaser, Zsolt Kira |
Georgia Institute of Technology |
Multi-Robot Systems II |
| Distributed Potential iLQR: Scalable Game-Theoretic Trajectory Planning for Multi-Agent Interactions |
Zach Williams, Jushan Chen, Negar Mehr |
University of Illinois Urbana-Champaign |
Multi-Robot Systems II |
| FRAME: Fast and Robust Autonomous 3D Point Cloud Map-Merging for Egocentric Multi-Robot Exploration |
Nikolaos Stathoulopoulos, Anton Koval, Ali-Akbar Agha-Mohammadi, George Nikolakopoulos |
Luleå University of Technology, Robotics and AI Group,Luleå University of Technology,NASA-JPL, Caltech |
Multi-Robot Systems II |
| Autonomous Task Planning for Heterogeneous Multi-Agent Systems |
Anatoli Tziola, Savvas Loizou |
Cyprus University of Technology |
Multi-Robot Systems II |
| Graph Neural Networks for Multi-Robot Active Information Acquisition |
Mariliza Tzes, Nikolaos Bousias, Evangelos Chatzipantazis, George J. Pappas |
University of Pennsylvania |
Multi-Robot Systems II |
| Balancing Efficiency and Unpredictability in Multi-Robot Patrolling: A MARL-Based Approach |
Lingxiao Guo, Haoxuan Pan, Xiaoming Duan, Jianping He |
Shanghai Jiao Tong University,Department of Automation, Shanghai Jiao Tong University |
Multi-Robot Systems II |
| Learning to Influence Vehicles’ Routing in Mixed-Autonomy Networks by Dynamically Controlling the Headway of Autonomous Cars |
Xiaoyu Ma, Negar Mehr |
University of Illinois at Urbana-Champaign,University of Illinois Urbana-Champaign |
Intelligent Transportation Systems II |
| Traffic-Aware Autonomous Driving with Differentiable Traffic Simulation |
Laura Zheng, Sanghyun Son, Ming C. Lin |
University of Maryland, College Park,University of Maryland,University of Maryland at College Park |
Intelligent Transportation Systems II |
| Multiagent Reinforcement Learning for Autonomous Routing and Pickup Problem with Adaptation to Variable Demand |
Daniel Garces, Sushmita Bhattacharya, Stephanie Gil, Dimitri Bertsekas |
Harvard University,MIT |
Intelligent Transportation Systems II |
| Cooperative Driving in Mixed Traffic of Manned and Unmanned Vehicles Based on Human Driving Behavior Understanding |
Jiaxing Lu, Sanzida Hossain, Weihua Sheng, He Bai |
Oklahoma State University |
Intelligent Transportation Systems II |
| Exploring Navigation Maps for Learning-Based Motion Prediction |
Julian Schmidt, Julian Jordan, Franz Gritschneder, Thomas Monninger, Klaus Dietmayer |
Mercedes-Benz AG, Ulm University,Mercedes-Benz AG,Ulm University,Mercedes-Benz AG, University of Stuttgart,University of Ulm |
Intelligent Transportation Systems II |
| SLAMesh: Real-Time LiDAR Simultaneous Localization and Meshing |
Jianyuan Ruan, Bo Li, Yibo Wang, Yuxiang Sun |
Hong Kong Polytechnic University,Zhejiang University,The Hong Kong Polytechnic University |
Intelligent Transportation Systems II |
| CenterLineDet: CenterLine Graph Detection for Road Lanes with Vehicle-Mounted Sensors by Transformer for HD Map Generation |
Zhenhua Xu, Yuxuan Liu, Yuxiang Sun, Ming Liu, Lujia Wang |
the Hong Kong University of Science and Technology,Hong Kong University of Science and Technology,The Hong Kong Polytechnic University,The Hong Kong University of Technology |
Intelligent Transportation Systems II |
| Guided Conditional Diffusion for Controllable Traffic Simulation |
Ziyuan Zhong, Davis Rempe, Danfei Xu, Yuxiao Chen, Sushant Veer, Tong Che, Baishakhi Ray, Marco Pavone |
Columbia University,Stanford University,Stanford Univesity,Nvidia research,NVIDIA,Columbia University in the City of New York |
Intelligent Transportation Systems II |
| TrafficGen: Learning to Generate Diverse and Realistic Traffic Scenarios |
Lan Feng, Quanyi Li, Zhenghao Peng, Shuhan Tan, Bolei Zhou |
ETH ZURICH,University of Edinburgh,University of California, Los Angeles,UT Austin |
Intelligent Transportation Systems II |
| Infrastructure-Based End-To-End Learning and Prevention of Driver Failure |
Noam Buckman, Shiva Sreeram, Mathias Lechner, Yutong Ban, Ramin Hasani, Sertac Karaman, Daniela Rus |
Massachusetts Institute of Technology,MIT,Massachusetts Institute of Technology (MIT) |
Intelligent Transportation Systems II |
| V2XP-ASG: Generating Adversarial Scenes for Vehicle-To-Everything Perception |
Hao Xiang, Runsheng Xu, Xia Xin, Zhaoliang Zheng, Bolei Zhou, Jiaqi Ma |
University of California, Los Angeles,UCLA |
Intelligent Transportation Systems II |
| Satellite Image Based Cross-View Localization for Autonomous Vehicle |
Shan Wang, Yanhao Zhang, Ankit Vora, Akhil Perincherry, Hongdong Li |
The Australian National University,Australian National University,Ford Motor Company,Australian National university and NICTA |
Intelligent Transportation Systems II |
| Collision-Free Coverage Path Planning for the Variable-Speed Curvature-Constrained Robot |
Lin Li, Dianxi Shi, Songchang Jin, Yixuan Sun, Xing Zhou, Shaowu Yang, Hengzhu Liu |
National University of Defense Technology,Defense Innovation Institute |
Motion and Path Planning II |
| Stochastic Traveling Salesperson Problem with Neighborhoods for Object Detection |
Cheng Peng, Minghan Wei, Volkan Isler |
Univerisyt of Minnesota, Twin Cities,University of Minnesota |
Motion and Path Planning II |
| Optimal Allocation of Many Robot Guards for Sweep-Line Coverage |
Si Wei Feng, Teng Guo, Jingjin Yu |
Rutgers University |
Motion and Path Planning II |
| A Linear and Exact Algorithm for Whole-Body Collision Evaluation Via Scale Optimization |
Qianhao Wang, Zhepei Wang, Liuao Pei, Chao Xu, Fei Gao |
Zhejiang University |
Motion and Path Planning II |
| Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments |
Khaled Alaaeldin Abdelfattah Mustafa, Oscar De Groot, Xinwei Wang, Jens Kober, Javier Alonso-Mora |
TU Delft,Delft University of Technology |
Motion and Path Planning II |
| Computational Tradeoff in Minimum Obstacle Displacement Planning for Robot Navigation |
Antony Thomas, Giulio Ferro, Fulvio Mastrogiovanni, Michela Robba |
University of Genoa |
Motion and Path Planning II |
| A Trajectory Planner for Mobile Robots Steering Non-Holonomic Wheelchairs in Dynamic Environments |
Martin Schulze, Friedrich Graaf, Lea Steffen, Arne Roennau, Rüdiger Dillmann |
FZI Research Center for Information Technology,FZI Research Center for Information Technology, , Karlsruhe,FZI Forschungszentrum Informatik, Karlsruhe,FZI - Forschungszentrum Informatik - Karlsruhe |
Motion and Path Planning II |
| Safe Bipedal Path Planning Via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression |
Chengyang Peng, Octavian Donca, Guillermo Castillo, Ayonga Hereid |
The Ohio State University,Ohio State University |
Motion and Path Planning II |
| Real-Time Decentralized Navigation of Nonholonomic Agents Using Shifted Yielding Areas |
He Liang, Zherong Pan, Dinesh Manocha |
University of North Carolina at Chapel Hill,Tencent America,University of Maryland |
Motion and Path Planning II |
| Differentiable Collision Detection for a Set of Convex Primitives |
Kevin Tracy, Taylor Howell, Zachary Manchester |
Carnegie Mellon University,Stanford University |
Motion and Path Planning II |
| Shunted Collision Avoidance for Multi-UAV Motion Planning with Posture Constraints |
Gang Xu, Deye Zhu, Junjie Cao, Yong Liu, Jian Yang |
Zhejiang University,Institute of Cyber Systems and Control, Zhejiang University,China Research and Development Academy of Machinery Equipment |
Motion and Path Planning II |
| Dynamic Control Barrier Function-Based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot |
Zhuozhu Jian, Zihong Yan, Xuanang Lei, Zihong Lu, Bin Lan, Xueqian Wang, Bin Liang |
Tsinghua University,Tsinghua university,ETH Zurich,Harbin Institute of Technology, Shenzhen,Center for Artificial Intelligence and Robotics, Graduate School |
Motion and Path Planning II |
| A Minimum Swept-Volume Metric Structure for Configuration Space |
Yann Dubois De Mont-marin, Jean Ponce, Jean-Paul Laumond |
Inria, DI ENS,Ecole Normale Supérieure,Inria, DI ENS PSL |
Task and Motion Planning |
| Task-Space Clustering for Mobile Manipulator Task Sequencing |
Quang-Nam Nguyen, Nicholas Adrian, Quang-Cuong Pham |
Nanyang Technological University,NTU Singapore |
Task and Motion Planning |
| Sampling-Based Path Planning under Temporal Logic Constraints with Real-Time Adaptation |
Yizhou Chen, Ruoyu Wang, Xinyi Wang, Ben M. Chen |
Chinese University of Hong Kong,The Chinese University of Hong Kong |
Task and Motion Planning |
| Optimal Grasps and Placements for Task and Motion Planning in Clutter |
Carlos Quintero-Pena, Zachary Kingston, Tianyang Pan, Rahul Shome, Anastasios Kyrillidis, Lydia Kavraki |
Rice University,The Australian National University |
Task and Motion Planning |
| Resolution Complete In-Place Object Retrieval Given Known Object Models |
Daniel Nakhimovich, Yinglong Miao, Kostas E. Bekris |
Rutgers, the State University of New Jersey,Rutgers University |
Task and Motion Planning |
| Task-Directed Exploration in Continuous POMDPs for Robotic Manipulation of Articulated Objects |
Aidan Curtis, Leslie Kaelbling, Siddarth Jain |
MIT,Mitsubishi Electric Research Laboratories (MERL) |
Task and Motion Planning |
| Learning Feasibility of Factored Nonlinear Programs in Robotic Manipulation Planning |
Joaquim Ortiz De Haro, Jung-su Ha, Danny Driess, Erez Karpas, Marc Toussaint |
University of Stuttgart,TU Berlin,Technion |
Task and Motion Planning |
| Learning to Predict Action Feasibility for Task and Motion Planning in 3D Environments |
Smail Ait Bouhsain, Alami Rachid, Thierry Simeon |
LAAS-CNRS,CNRS |
Task and Motion Planning |
| Policy Guided Lazy Search with Feedback for Task and Motion Planning |
Mohamed Khodeir, Atharv Sonwane, Ruthrash Hari, Florian Shkurti |
University of Toronto,Microsoft Research |
Task and Motion Planning |
| A Reachability Tree-Based Algorithm for Robot Task and Motion Planning |
Kanghyun Kim, Daehyung Park, Min Jun Kim |
Korea Advanced Institute of Science and Technology (KAIST),Korea Advanced Institute of Science and Technology, KAIST,KAIST |
Task and Motion Planning |
| Dual Quaternion Based Dynamic Movement Primitives to Learn Industrial Tasks Using Teleoperation |
Rohit CHANDRA, Victor Henri Giraud, Mohammad Alkhatib, Youcef Mezouar |
SIGMA, UCA Clermont-Ferrand, France,SIGMA-Clermont / Institut Pascal,Université Clermont Auvergne,Clermont Auvergne INP - SIGMA Clermont |
Task and Motion Planning |
| Multi-Contact Task and Motion Planning Guided by Video Demonstration |
Kateryna Zorina, David Kovar, Florent Lamiraux, Nicolas Mansard, Justin Carpentier, Josef Sivic, Vladimír Petrík |
CIIRC,Czech Technical University in Prague,CNRS,INRIA,Czech Technical University |
Task and Motion Planning |
| MVTrans: Multi-View Perception of Transparent Objects |
Yi Ru Wang, Yuchi Zhao, Haoping Xu, Sagi Eppel, Alan Aspuru-guzik, Florian Shkurti, Animesh Garg |
University of Toronto, University of Washington,University of Waterloo,University of Toronto |
Perception for Grasping and Manipulation II |
| The Sum of Its Parts: Visual Part Segmentation for Inertial Parameter Identification of Manipulated Objects |
Philippe Nadeau, Matthew Giamou, Jonathan Kelly |
University of Toronto |
Perception for Grasping and Manipulation II |
| SLURP! Spectroscopy of Liquids Using Robot Pre-Touch Sensing |
Nathaniel Hanson, Wesley Lewis, Kavya Puthuveetil, Donelle Furline Jr, Akhil Padmanabha, Taskin Padir, Zackory Erickson |
Northeastern University,Carnegie Mellon University |
Perception for Grasping and Manipulation II |
| Tactile Based Robotic Skills for Cable Routing Operations |
Andrea Monguzzi, Martina Pelosi, Andrea Maria Zanchettin, Paolo Rocco |
Politecnico di Milano |
Perception for Grasping and Manipulation II |
| Category-Level Global Camera Pose Estimation with Multi-Hypothesis Point Cloud Correspondences |
Jun-Jee Chao, Kazim Selim Engin, Nicolai Häni, Volkan Isler |
University of Minnesota |
Perception for Grasping and Manipulation II |
| GSMR-CNN: An End-To-End Trainable Architecture for Grasping Target Objects from Multi-Object Scenes |
Valerija Holomjova, Andrew Joe Starkey, Pascal Meißner |
University of Aberdeen |
Perception for Grasping and Manipulation II |
| 3DSGrasp: 3D Shape-Completion for Robotic Grasp |
Seyed Saber Mohammadi, Nuno Ferreira Duarte, Plinio Moreno, Atabak Dehban, Dimitrios Dimou, Pietro Morerio, Matteo Taiana, Yiming Wang, Alexandre Bernardino, Alessio Del Bue, José Santos-Victor |
Istituto Italiano di Tecnologia (IIT),IST-ID,IST-ID , , ,Instituto Superior Tecnico, University of Lisbon,Istituto Italiano di Tecnologia,Italian Institute of Technology (IIT),Fondazione Bruno Kessler,IST - Técnico Lisboa,Instituto Superior Técnico - Lisbon |
Perception for Grasping and Manipulation II |
| Goal-Conditioned Action Space Reduction for Deformable Object Manipulation |
Shengyin Wang, Rafael Papallas, Matteo Leonetti, Mehmet Remzi Dogar |
University of Leeds,King’s College London |
Perception for Grasping and Manipulation II |
| MMRDN: Consistent Representation for Multi-View Manipulation Relationship Detection in Object-Stacked Scenes |
Han Wang, Jiayuan Zhang, Lipeng Wan, Xingyu Chen, Xuguang Lan, Nan-Ning Zheng |
Xi’an Jiaotong University,Xi’an Jiaotong Univ. |
Perception for Grasping and Manipulation II |
| SCARP: 3D Shape Completion in ARbitrary Poses for Improved Grasping |
Bipasha Sen, Aditya Agarwal, Gaurav Singh, Brojeshwar Bhowmick, Srinath Sridhar, Madhava Krishna |
International Institute of Information Technology,IIIT Hyderabad,Tata Consultancy Services,Brown University |
Perception for Grasping and Manipulation II |
| Category-Level Shape Estimation for Densely Cluttered Objects |
Zhenyu Wu, Ziwei Wang, Jiwen Lu, Haibin Yan |
Beijing University of Posts and Telecommunications,Tsinghua University |
Perception for Grasping and Manipulation II |
| Counter-Hypothetical Particle Filters for Single Object Pose Tracking |
Elizabeth Olson, Jana Pavlasek, Jasmine Berry, Odest Chadwicke Jenkins |
University of Michigan |
Perception for Grasping and Manipulation II |
| Reinforcement Learning Based Pushing and Grasping Objects from Ungraspable Poses |
Hao Zhang, Hongzhuo Liang, Lin Cong, Jianzhi Lyu, Long Zeng, Pingfa Feng, Jianwei Zhang |
Tsinghua University,University of Hamburg |
Learning for Grasping and Manipulation II |
| Efficient Bimanual Handover and Rearrangement Via Symmetry-Aware Actor-Critic Learning |
Yunfei Li, Chaoyi Pan, Huazhe Xu, Xiaolong Wang, Yi Wu |
Tsinghua University,UC San Diego |
Learning for Grasping and Manipulation II |
| EDO-Net: Learning Elastic Properties of Deformable Objects from Graph Dynamics |
Alberta Longhini, Marco Moletta, Alfredo Reichlin, Michael Welle, David Held, Zackory Erickson, Danica Kragic |
KTH Royal Institute of Technology,Carnegie Mellon University,KTH |
Learning for Grasping and Manipulation II |
| Edge Grasp Network: A Graph-Based SE(3)-Invariant Approach to Grasp Detection |
Haojie Huang, Dian Wang, Xupeng Zhu, Robin Walters, Robert Platt |
Northeastern University |
Learning for Grasping and Manipulation II |
| Learning Dexterous Manipulation from Exemplar Object Trajectories and Pre-Grasps |
Sudeep Dasari, Abhinav Gupta, Vikash Kumar |
Carnegie Mellon University,Meta AI |
Learning for Grasping and Manipulation II |
| A Multi-Agent Approach for Adaptive Finger Cooperation in Learning-Based In-Hand Manipulation |
Lingfeng Tao, Jiucai Zhang, Michael Bowman, Xiaoli Zhang |
Colorado School of Mines,Guangzhou Automotive Group R&D Center, Silicon Valley |
Learning for Grasping and Manipulation II |
| Bimanual Rope Manipulation Skill Synthesis through Context Dependent Correction Policy Learning from Human Demonstration |
Baturhan Akbulut, Tuba Girgin, Arash Mehrabi, Minoru Asada, Emre Ugur, Erhan Oztop |
BoÄŸaziçi University,Bogazici University,Ozyegin University,Open and Transdisciplinary Research Initiatives, Osaka Universit,Osaka University / Ozyegin University |
Learning for Grasping and Manipulation II |
| Sim-And-Real Reinforcement Learning for Manipulation: A Consensus-Based Approach |
Wenxing Liu, Hanlin Niu, Wei Pan, Guido Herrmann, Joaquin Carrasco |
United Kingdom Atomic Energy Authority,Delft University of Technology,The University of Manchester |
Learning for Grasping and Manipulation II |
| AutoBag: Learning to Open Plastic Bags and Insert Objects |
Lawrence Yunliang Chen, Baiyu Shi, Daniel Seita, Richard Cheng, Thomas Kollar, David Held, Ken Goldberg |
UC Berkeley,Carnegie Mellon University,California Institute of Technology,Toyota Research Institute |
Learning for Grasping and Manipulation II |
| Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information |
Jinda Cui, Jiawei Xu, David Saldana, Jeffrey Trinkle |
Honda Research Institute USA, Inc.,Lehigh University |
Learning for Grasping and Manipulation II |
| Ditto in the House: Building Articulation Models of Indoor Scenes through Interactive Perception |
Cheng-chun Hsu, Zhenyu Jiang, Yuke Zhu |
The University of Texas at Austin,The Unversity of Texas at Austin |
Learning for Grasping and Manipulation II |
| Zero-Shot Transfer of Haptics-Based Object Insertion Policies |
Samarth Brahmbhatt, Ankur Deka, Andrew Spielberg, Matthias Mueller |
Intel Corporation,Intel Labs,Harvard University, MIT,Intel |
Learning for Grasping and Manipulation II |
| Moment-Based Kalman Filter: Nonlinear Kalman Filtering with Exact Moment Propagation |
Yutaka Shimizu, Ashkan Jasour, Maani Ghaffari, Shinpei Kato |
TIER IV,MIT,University of Michigan,The University of Tokyo |
Localization II |
| Unsupervised Quality Prediction for Improved Single-Frame and Weighted Sequential Visual Place Recognition |
Helen Carson, Jason Ford, Michael J Milford |
Queensland University of Technology |
Localization II |
| Towards Consistent Batch State Estimation Using a Time-Correlated Measurement Noise Model |
David Juny Yoon, Timothy Barfoot |
University of Toronto |
Localization II |
| A Probabilistic Framework for Visual Localization in Ambiguous Scenes |
Fereidoon Zangeneh, Leonard Bruns, Amit Dekel, Alessandro Pieropan, Patric Jensfelt |
KTH Royal Institute of Technology,Univrses AB,KTH,KTH - Royal Institute of Technology |
Localization II |
| RoLM: Radar on LiDAR Map Localization |
Yukai Ma, Xiangrui Zhao, Han Li, Yaqing Gu, Xiaolei Lang, Yong Liu |
zhejiang unicersity,Zhejiang University |
Localization II |
| Direct LiDAR-Inertial Odometry: Lightweight LIO with Continuous-Time Motion Correction |
Kenny Chen, Ryan Nemiroff, Brett Lopez |
University of California, Los Angeles |
Localization II |
| Large-Scale Radar Localization Using Online Public Maps |
Ziyang Hong, Y. R. Petillot, Kaicheng Zhang, Shida Xu, Sen Wang |
Heriot-Watt University,Imperial College London |
Localization II |
| Continuous-Time LiDAR-Inertial-Vehicle Odometry Method with Lateral Acceleration Constraint |
Bin He, Weichen Dai, Zeyu Wan, Hong Zhang, Yu Zhang |
Zhejiang University,Hangzhou Dianzi University |
Localization II |
| Cross-Modal Monocular Localization in Prior LiDAR Maps Utilizing Semantic Consistency |
Zhang Chi, Hengwang Zhao, Chunxiang Wang, Xuanlai Tang, Ming Yang |
Shanghai Jiao Tong University,Shanghai Jiaotong University,KEENON Robotics Co., Ltd |
Localization III |
| Multi-State Tightly-Coupled EKF-Based Radar-Inertial Odometry with Persistent Landmarks |
Jan Michalczyk, Roland Jung, Christian Brommer, Stephan Weiss |
University of Klagenfurt,Universität Klagenfurt |
Localization III |
| Loc-NeRF: Monte Carlo Localization Using Neural Radiance Fields |
Dominic Maggio, Marcus Abate, Jingnan Shi, Courtney Mario, Luca Carlone |
Massachusetts Institute of Technology,MIT,Draper |
Localization III |
| RoSS: Rotation-Induced Aliasing for Audio Source Separation |
Hyungjoo Seo, Sahil Bhandary Karnoor, Romit Roy Choudhury |
University of Illinois at Urbana-Champaign |
Localization III |
| L-C*: Visual-Inertial Loose Coupling for Resilient and Lightweight Direct Visual Localization |
Shuji Oishi, Kenji Koide, Masashi Yokozuka, Atsuhiko Banno |
National Institute of Advanced Industrial Science and Technology (AIST),National Institute of Advanced Industrial Science and Technology,Nat. Inst. of Advanced Industrial Science and Technology,National Instisute of Advanced Industrial Science and Technology |
Localization III |
| GRM: Gradient Rectification Module for Visual Place Retrieval |
Boshu Lei, Wenjie Ding, Limeng Qiao, Xi Qiu |
University of Pennsylvania,MEGVII Inc,Megvii Inc.,Megvii |
Localization III |
| DytanVO: Joint Refinement of Visual Odometry and Motion Segmentation in Dynamic Environments |
Shihao Shen, Yilin Cai, Wenshan Wang, Sebastian Scherer |
Carnegie Mellon University |
Localization III |
| NOCaL: Calibration-Free Semi-Supervised Learning of Odometry and Camera Intrinsics |
Ryan Griffiths, Jack Naylor, Donald G Dansereau |
University of Sydney |
Localization III |
| Efficient View Path Planning for Autonomous Implicit Reconstruction |
Jing Zeng, Yanxu Li, Yunlong Ran, Shuo Li, Shibo He, Fei Gao, Lincheng Li, Jiming Chen, Qi Ye |
Zhejiang University,NetEase Fuxi AI Lab |
Vision-Based Navigation II |
| Lighthouses and Global Graph Stabilization: Active SLAM for Low-Compute, Narrow-FoV Robots |
Mohit Deshpande, Richard Kim, Dhruva Kumar, Jong Jin Park, James Zamiska |
Amazon Lab,Amazon, Lab,Amazon |
Vision-Based Navigation II |
| ExAug: Robot-Conditioned Navigation Policies Via Geometric Experience Augmentation |
Noriaki Hirose, Dhruv Shah, Ajay Sridhar, Sergey Levine |
UC Berkeley / TOYOTA Motor North America,University of California, Berkeley,UC Berkeley |
Vision-Based Navigation II |
| Multi-Object Navigation in Real Environments Using Hybrid Policies |
Assem Sadek, Guillaume Bono, Boris Chidlovskii, Atilla Baskurt, Christian Wolf |
Naver Labs Europe,Naverlabs Europe,INSA Lyon |
Vision-Based Navigation II |
| AeriaLPiPS: A Local Planner for Aerial Vehicles with Geometric Collision Checking |
Justin Smith, Patricio A. Vela |
Georgia Institute of Technology |
Vision-Based Navigation II |
| Frontier Semantic Exploration for Visual Target Navigation |
Bangguo Yu, Hamidreza Kasaei, Ming Cao |
University of Groningen |
Vision-Based Navigation II |
| VINet: Visual and Inertial-Based Terrain Classification and Adaptive Navigation Over Unknown Terrain |
Tianrui Guan, Ruitao Song, Zhixian Ye, Liangjun Zhang |
University of Maryland,Aptiv Corporation,Baidu |
Vision-Based Navigation II |
| Ground Then Navigate: Language-Guided Navigation in Dynamic Scenes |
Kanishk Jain, Varun Chhangani, Amogh Tiwari, Madhava Krishna, Vineet Gandhi |
IIIT Hyderabad |
Vision-Based Navigation II |
| 3-Dimensional Sonic Phase-Invariant Echo Localization |
Christopher Hahne |
University of Bern |
Localization and Mapping II |
| Calibration and Uncertainty Characterization for Ultra-Wideband Two-Way-Ranging Measurements |
Mohammed A. Shalaby, Charles Champagne Cossette, James Richard Forbes, Jerome Le Ny |
McGill University,Polytechnique Montreal |
Localization and Mapping II |
| High Resolution Point Clouds from mmWave Radar |
Akarsh Prabhakara, Tao Jin, Arnav Das, Gantavya Bhatt, Lilly Kumari, Elahe Soltanaghai, Jeff Bilmes, Swarun Kumar, Anthony Rowe |
Carnegie Mellon University,University of Washington,University of Illinois Urbana-Champaign |
Localization and Mapping II |
| Pyramid Learnable Tokens for 3D LiDAR Place Recognition |
Congcong Wen, Hao Huang, Yu-shen Liu, Yi Fang |
New York University Abu Dhabi,New York University,Tsinghua University |
Localization and Mapping II |
| A Decoupled and Linear Framework for Global Outlier Rejection Over Planar Pose Graph |
Tianyue Wu, Fei Gao |
Zhejiang University |
Localization and Mapping II |
| Robust Incremental Smoothing and Mapping (riSAM) |
Daniel Mcgann, John G. Rogers Iii, Michael Kaess |
Carnegie Mellon University,US Army Research Laboratory |
Localization and Mapping II |
| Real-Time Simultaneous Localization and Mapping with LiDAR Intensity |
Wenqiang Du, Giovanni Beltrame |
Polytechnique Montreal,Ecole Polytechnique de Montreal |
Localization and Mapping II |
| iMODE: Real-Time Incremental Monocular Dense Mapping Using Neural Field |
Hidenobu Matsuki, Edgar Sucar, Tristan Laidlow, Kentaro Wada, Raluca Scona, Andrew J Davison |
Imperial College London,Mujin, Inc.,Ocado Technology |
Localization and Mapping II |
| Probabilistic Uncertainty Quantification of Prediction Models with Application to Visual Localization |
Junan Chen, Josephine Monica, Wei-Lun Chao, Mark Campbell |
Cornell University |
Localization and Mapping II |
| Extrinsic Calibration for Highly Accurate Trajectories Reconstruction |
Maxime Vaidis, William Dubois, Alexandre Guénette, Johann Laconte, Vladimir Kubelka, Francois Pomerleau |
Université Laval,University of Toronto,Örebro University |
Localization and Mapping II |
| Cerberus: Low-Drift Visual-Inertial-Leg Odometry for Agile Locomotion |
Shuo Yang, Zixin Zhang, Zhengyu Fu, Zachary Manchester |
Carnegie Mellon University,The Hong Kong University of Science and Technology |
Localization and Mapping II |
| Ensembles of Compact, Region-Specific & Regularized Spiking Neural Networks for Scalable Place Recognition |
Somayeh Hussaini, Michael J Milford, Tobias Fischer |
Queensland University of Technology |
Localization and Mapping II |
| Line As a Visual Sentence: Context-Aware Line Descriptor for Visual Localization |
Sungho Yoon, Ayoung Kim |
NAVER LABS,Seoul National University |
Localisation 1 |
| Robust Visual Localization of a UAV Over a Pipe-Rack Based on the Lie Group SE(3) |
Vincenzo Lippiello, Jonathan Cacace |
University of Naples FEDERICO II,University of Naples |
Localisation 1 |
| Finding the Right Place: Sensor Placement for UWB Time Difference of Arrival Localization in Cluttered Indoor Environments |
Zhao Wenda, Abhishek Goudar, Angela P. Schoellig |
University of Toronto,TU Munich |
Localisation 1 |
| EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale |
Jacek Komorowski, Monika Wysoczanska, Tomasz Trzcinski |
Warsaw University of Technology |
Localisation 1 |
| Stein Particle Filter for Nonlinear, Non-Gaussian State Estimation |
Fahira Afzal Maken, Fabio Ramos, Lionel Ott |
Data, CSIRO,University of Sydney, NVIDIA,ETH Zurich |
Localisation 1 |
| Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels |
Chunge Bai, Tao Xiao, Yajie Chen, Haoqian Wang, Fang Zhang, Xiang Gao |
Tsinghua University,Beijing Idriverplus Technology Co. Ltd.,IDRIVERPLUS,Beijing Idriverplus Technology Co., Ltd.,idriverplus.com |
Localisation 1 |
| Homography-Based Loss Function for Camera Pose Regression |
Clémentin Boittiaux, Ricard Marxer, Claire Dune, Aurélien Arnaubec, Vincent Hugel |
Ifremer,Université de Toulon, Aix Marseille Univ, CNRS, LIS,Université de Toulon,University of Toulon |
Localisation 1 |
| Broadband Sound Source Localization Via Non-Synchronous Measurements for Service Robots: A Tensor Completion Approach |
Long Chen, Weize Sun, Lei Huang, Liang Yu |
Northwestern Polytechnical University,Shenzhen University,Shanghai Jiao Tong University |
Localisation 1 |
| Proprioceptive Soft Pneumatic Gripper for Extreme Environments Using Hybrid Optical Fibers |
Babar Jamil, Gyeongjae Yoo, Youngjin Choi, Hugo Rodrigue |
Sungkyunkwan University,University of Rochester,Hanyang University |
Soft Sensors and Actuators |
| Modeling and Characterizing Two Dielectric Elastomer Folding Actuators for Origami-Inspired Robot |
Li Yang, Ting Zhang |
Soochow University |
Soft Sensors and Actuators |
| Deployable Soft Pneumatic Networks (D-PneuNets) Actuator with Dual-Morphing Origami Chambers for High Compactness |
Woongbae Kim, Bada Seo, Sung Yol Yu, Kyu-Jin Cho |
Korea Institue of Science and Technology,Seoul National University,Seoul National University, Biorobotics Laboratory |
Soft Sensors and Actuators |
| Soft Fluidic Actuator for Locomotion in Multi-Phase Environments |
Roza Gkliva, Maarja Kruusmaa |
Tallinn University of Technology |
Soft Sensors and Actuators |
| Contact Surface and Pose Recognition: Utilizing Multipole Magnetic Tactile Sensor with Meta Learning Model |
Ziwei Xia, Bin Fang, Fuchun Sun, Huaping Liu, Wei Feng Xu, Ling Fu, Yiyong Yang |
China University of Geosciences, Haidian District, Beijing, Chin,Tsinghua university,Tsinghua University,Siemens Ltd., China,School of Engineering and Technology, China University of Geosci |
Soft Sensors and Actuators |
| Force/Torque-Sensorless Joint Stiffness Estimation in Articulated Soft Robots |
Maja Trumic, Giorgio Grioli, Kosta Jovanovic, Adriano Fagiolini |
University of Belgrade,Istituto Italiano di Tecnologia,University of Belgrade, Serbia,University of Palermo |
Soft Sensors and Actuators |
| Retractable Locking System Driven by Shape Memory Alloy Actuator for Lightweight Soft Robotic Application |
Young Jin Gong, Seong Taek Hwang, Sang Yul Yang, Kihyeon Kim, Jae Hyeong Park, Hosang Jung, Dongsu Shin, Hyouk Ryeol Choi |
SungKyunKwan university(SKKU),Sungkyunkwan University(SKKU),Sungkyunkwan university,Sungkyunkwan University,Sungkwunkwan University |
Soft Sensors and Actuators |
| Elastic-Actuation Mechanism for Repetitive Hopping Based on Power Modulation and Cyclic Trajectory Generation |
Won Dong Shin, William Stewart, Matthew Estrada, Auke Ijspeert, Dario Floreano |
EPFL,Ecole Polytechnique Federale de Lausanne,École polytechnique fédérale de Lausanne,Ecole Polytechnique Federal, Lausanne |
Soft Sensors and Actuators |
| Learning-Based Fabric Folding and Box Wrapping |
Xiaoman Wang, Jie Zhao, Xin Jiang, Yunhui Liu |
Harbin Institute of Technology, Shenzhen,Chinese University of Hong Kong |
Manipulation and Grasping I |
| Few-Shot Instance Grasping of Novel Objects in Clutter |
Weikun Guo, Wei Li, Ziye Hu, Zhongxue Gan |
Fudan University,ENN Group |
Manipulation and Grasping I |
| TransCG: A Large-Scale Real-World Dataset for Transparent Object Depth Completion and a Grasping Baseline |
Hongjie Fang, Hao-shu Fang, Sheng Xu, Cewu Lu |
Shanghai Jiao Tong University,ShangHai Jiao Tong University |
Manipulation and Grasping I |
| Dual-Arm Control for Coordinated Fast Grabbing and Tossing of an Object |
Michael Bombile, Aude G. Billard |
Ecole Polytechnique Federale de Lausanne (EPFL),EPFL |
Manipulation and Grasping I |
| RBO Hand 3 - a Platform for Soft Dexterous Manipulation |
Steffen Puhlmann, Jason Harris, Oliver Brock |
TU Berlin,Technische Universitaet Berlin,Technische Universität Berlin |
Manipulation and Grasping I |
| A Multi-DoF Exoskeleton Haptic Device for the Grasping of a Compliant Object Adapting to a User’s Motion Using Jamming Transitions |
Ryohei Michikawa, Takahiro Endo, Fumitoshi Matsuno |
Kyoto university,Kyoto University |
Manipulation and Grasping I |
| Peg-In-Hole Assembly with Dual-Arm Robot and Dexterous Robot Hands |
Dong-Hyuk Lee, Myoung-su Choi, Hyeonjun Park, Ga-ram Jang, Jae-Han Park, Ji-Hun Bae |
Korea Institute of Industrial Technology (KITECH),KITECH, UST,Korea Institute of Robotics & Technology Convergence,Korea Institute of Industrial Technology |
Manipulation and Grasping I |
| Manipulation Planning Using Wave Variables |
Phongsaen Pitakwatchara, Jetnipit Arunrat |
Chulalongkorn University,Chula university |
Manipulation and Grasping I |
| Active Inference and Behavior Trees for Reactive Action Planning and Execution in Robotics |
Corrado Pezzato, Carlos Hernandez Corbato, Stefan Bonhof, Martijn Wisse |
Delft University of Technology,TU Delft |
Manipulation and Grasping I |
| Physically Consistent Preferential Bayesian Optimization for Food Arrangement |
Yuhwan Kwon, Yoshihisa Tsurumine, Takeshi Shimmura, Sadao Kawamura, Takamitsu Matsubara |
Nara Institute of Science and Technology,Ritsumeikan University |
Human Centered and Inspired Robotics |
| Multi-Objective Trajectory Optimization to Improve Ergonomics in Human Motion |
Waldez Gomes, Pauline Maurice, Eloise Dalin, Jean-Baptiste Mouret, Serena Ivaldi |
Université Paris-Saclay,CNRS - LORIA,INRIA,Inria |
Human Centered and Inspired Robotics |
| Interactive Dynamic Walking: Learning Gait Switching Policies with Generalization Guarantees |
Prem Chand, Sushant Veer, Ioannis Poulakakis |
University of Delaware,NVIDIA |
Human Centered and Inspired Robotics |
| Deep Predictive Model Learning with Parametric Bias: Handling Modeling Difficulties and Temporal Model Changes |
Kento Kawaharazuka, Kei Okada, Masayuki Inaba |
The University of Tokyo |
Human Centered and Inspired Robotics |
| Power-Based Velocity-Domain Variable Structure Passivity Signature Control for Physical Human-(Tele)Robot Interaction |
Peter Paik, Smrithi Thudi, S. Farokh Atashzar |
New York University,New York University (NYU), US |
Human Centered and Inspired Robotics |
| Human-Multirobot Collaborative Mobile Manipulation: The Omnid Mocobots |
Matthew Elwin, Billie Strong, Randy Freeman, Kevin Lynch |
Northwestern University |
Human Centered and Inspired Robotics |
| TransDSSL: Transformer Based Depth Estimation Via Self-Supervised Learning |
Daechan Han, Jeongmin Shin, Namil Kim, Soonmin Hwang, Yukyung Choi |
Sejong university,Sejong University,NAVER LABS,Carnegie Mellon University |
Deep Learning for Visual Perception |
| Stereo Plane R-CNN: Accurate Scene Geometry Reconstruction Using Planar Segments and Camera-Agnostic Representation |
Jan Wietrzykowski, Dominik Belter |
Poznan University of Technology |
Deep Learning for Visual Perception |
| Object-Aware Monocular Depth Prediction with Instance Convolutions |
Enis Simsar, Evin Pınar Örnek, Fabian Manhardt, Helisa Dhamo, Nassir Navab, Federico Tombari |
ETH Zurich,Technical University of Munich,Google,Technische Universität München,TU Munich |
Deep Learning for Visual Perception |
| Uncertainty Guided Policy for Active Robotic 3D Reconstruction Using Neural Radiance Fields |
Soomin Lee, Le Chen, Jiahao Wang, Alexander Liniger, Suryansh Kumar, Fisher Yu |
Oracle,ETH Zurich,ETH Zürich |
Deep Learning for Visual Perception |
| Detaching and Boosting: Dual Engine for Scale-Invariant Self-Supervised Monocular Depth Estimation |
Peizhe Jiang, Wei Yang, Xiaoqing Ye, Xiao Tan, Meng Wu |
Northwestern Polytechnical University,Baidu,Baidu Inc. |
Deep Learning for Visual Perception |
| Lidar Upsampling with Sliced Wasserstein Distance |
Artem Savkin, Yida Wang, Sebastian Wirkert, Nassir Navab, Federico Tombari |
TUM,Technical University of Munich,German Cancer Research Center,TU Munich,Technische Universität München |
Deep Learning for Visual Perception |
| Accurate 3D Single Object Tracker with Local-To-Global Feature Refinement |
Baojie Fan, Kai Wang, Wuyang Zhou, Yu Shi Yang, Kaiwei Ma, Guoping Jiang |
Nanjing University of Posts and Telecommunications,Nanjing University of Posts and Telecommunications |
Deep Learning for Visual Perception |
| Aggregation Functions for Simultaneous Attitude and Image Estimation with Event Cameras at High Angular Rates |
Matthew Ng, Zi Min Er, Gim Song Soh, Shaohui Foong |
Singapore University of Technology and Design |
Aerial Robots and Autonomous Agents |
| RAST: Risk-Aware Spatio-Temporal Safety Corridors for MAV Navigation in Dynamic Uncertain Environments |
Gang Chen, Siyuan Wu, Moji Shi, Wei Dong, Hai Zhu, Javier Alonso-Mora |
Delft University of Technology,Shanghai Jiao Tong University,Chinese Academy of Military Sciences |
Aerial Robots and Autonomous Agents |
| Energy Aware Impedance Control of a Flying End-Effector in the Port-Hamiltonian Framework |
Ramy Rashad, Davide Bicego, Jelle Zult, Santiago Sanchez-escalonilla, Ran Jiao, Antonio Franchi, Stefano Stramigioli |
University of Twente,Bond High Performance ,D Technology,Beihang University |
Aerial Robots and Autonomous Agents |
| Momentum-Based Extended Kalman Filter for Thrust Estimation on Flying Multibody Robots |
Hosameldin Awadalla Omer Mohamed, Gabriele Nava, Giuseppe L’erario, Silvio Traversaro, Fabio Bergonti, Luca Fiorio, Punith Reddy Vanteddu, Francesco Braghin, Daniele Pucci |
Italian Institute of Technology,Istituto Italiano di Tecnologia,Politecnico di Milano |
Aerial Robots and Autonomous Agents |
| Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration |
Alessandro Fornasier, Yonhon Ng, Christian Brommer, Christoph Böhm, Robert Mahony, Stephan Weiss |
University of Klagenfurt,Australian National University,University Klagenfurt,Universität Klagenfurt |
Aerial Robots and Autonomous Agents |
| DIDER: Discovering Interpretable Dynamically Evolving Relations |
Enna Sachdeva, Chiho Choi |
Honda Research Institute |
Aerial Robots and Autonomous Agents |
| A Global Max-Flow-Based Multi-Resolution Next-Best-View Method for Reconstruction of 3D Unknown Objects |
Sicong Pan, Hui Wei |
Fudan University |
Aerial Robots and Autonomous Agents |
| A Stack-Of-Tasks Approach Combined with Behavior Trees: A New Framework for Robot Control |
David Caceres Dominguez, Marco Iannotta, Johannes A. Stork, Erik Schaffernicht, Todor Stoyanov |
Örebro University,Orebro University,Örebro University, AASS Research Center |
Aerial Robots and Autonomous Agents |
| Demonstration-Guided Reinforcement Learning with Efficient Exploration for Task Automation of Surgical Robot |
Tao Huang, Kai Chen, Bin Li, Yunhui Liu, Qi Dou |
The Chinese University of Hong Kong,Chinese University of Hong Kong |
Medical Robotics I |
| Dual-Robot Collaborative System for Autonomous Venous Access Based on Ultrasound and Bioimpedance Sensing Technology |
Maria Koskinopoulou, Alperen Acemoglu, Veronica Penza, Leonardo Mattos |
Heriot Watt University,Istituto Italiano di Tecnologia |
Medical Robotics I |
| Vitreoretinal Surgical Robotic System with Autonomous Orbital Manipulation Using Vector-Field Inequalities |
Yuki Koyama, Murilo Marinho, Kanako Harada |
The University of Tokyo |
Medical Robotics I |
| Autonomous Needle Navigation in Retinal Microsurgery: Evaluation in Ex Vivo Porcine Eyes |
Peiyao Zhang, Ji Woong Kim, Peter Gehlbach, Iulian Iordachita, Marin Kobilarov |
Johns Hopkins University,Johns Hopkins Medical Institute |
Medical Robotics I |
| Dynamic Modeling and Identification of a Robotic Intracardiac Echo Catheter |
Mohammad Salehizadeh, Filipe Pedrosa, Harmanpreet Bassan, Rajnikant V. Patel, Jagadeesan Jayender |
Harvard Medical School, Brigham and Women’s Hospital,Western University,The University of Western Ontario |
Medical Robotics I |
| Modeling of a Robotic Transcatheter Delivery System |
Namrata Unnikrishnan Nayar, Ronghuai Qi, Jaydev Desai |
Georgia Institute of Technology, RoboMed Lab,Georgia Institute of Technology |
Medical Robotics I |
| A Handheld Hydraulic Cardiac Catheter with Omnidirectional Manipulator and Touch Sensing |
Nguyen Chi Cong, James J. Davies, Mai Thanh Thai, Trung Thien Hoang, Phuoc Thien Phan, Kefan Zhu, Dang Bao Nhi Tran, Van Ho, Hung La, Hoang Phuong Phan, Nigel Lovell, Thanh Nho Do |
University of New South Wales,UNSW Sydney,RMIT,Japan Advanced Institute of Science and Technology,University of Nevada at Reno,The University of Tokyo |
Medical Robotics I |
| Optimized Design and Analysis of Active Propeller-Driven Capsule Endoscopic Robot for Gastric Examination |
Yi Zhang, Weihao Wang, Wende Ke, Chengzhi Hu |
Southern University of Science and Technology |
Medical Robotics I |
| QuadMag: A Mobile-Coil System with Enhanced Magnetic Actuation Efficiency and Dexterity |
Lidong Yang, Moqiu Zhang, Zhengxin Yang, Haojin Yang, Li Zhang |
The Hong Kong Polytechnic University,The Chinese University of Hong Kong,The Chinese Univeristy of HongKong |
Medical Robotics I |
| Evaluating the Feasibility of Magnetic Tools for the Minimum Dynamic Requirements of Microneurosurgery |
Cameron Forbrigger, Erik Fredin, Eric Diller |
University of Toronto |
Medical Robotics I |
| A Novel Concentric Tube Steerable Drilling Robot for Minimally Invasive Treatment of Spinal Tumors Using Cavity and U-Shape Drilling Techniques |
Susheela Sharma, Ji Hwan Park, Jordan P. Amadio, Mohsen Khadem, Farshid Alambeigi |
University of Texas at Austin,The University of Texas at Austin,University of Texas Dell Medical School,University of Edinburgh |
Medical Robotics I |
| Magnetic Ball Chain Robots for Endoluminal Interventions |
Giovanni Pittiglio, Margherita Mencattelli, Pierre Dupont |
Harvard University,Boston Children’s Hospital, Harvard Medical School,Children’s Hospital Boston, Harvard Medical School |
Medical Robotics I |
| Robotic Navigation Autonomy for Subretinal Injection Via Intelligent Real-Time Virtual iOCT Volume Slicing |
Shervin Dehghani, Michael Sommersperger, Peiyao Zhang, Alejandro Martin-gomez, Benjamin Busam, Peter Gehlbach, Nassir Navab, M. Ali Nasseri, Iulian Iordachita |
TUM,Technical University of Munich,Johns Hopkins University,Johns Hopkins Medical Institute,TU Munich,Technische Universitaet Muenchen |
Medical Imaging and Perception II |
| 3D Reconstruction of Tibia and Fibula Using One General Model and Two X-Ray Images |
Kai Pan, Shuai Zhang, Liang Zhao, Shoudong Huang, Yanhao Zhang, Hua Wang, Qi Luo |
University of Technology Sydney,University of Technology, Sydney,Australian National University,Osteoarthropathy surgery department, Shenzhen People’s Hospital |
Medical Imaging and Perception II |
| Semantic-SuPer: A Semantic-Aware Surgical Perception Framework for Endoscopic Tissue Classification, Reconstruction, and Tracking |
Shan Lin, Albert Miao, Jingpei Lu, Shunkai Yu, Zih-Yun Chiu, Florian Richter, Michael Yip |
University of California, San Diego,University of California San Diego,UC San Diego |
Medical Imaging and Perception II |
| Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-Driven Keypoint Detection |
Neelay Joglekar, Fei Liu, Ryan Orosco, Michael Yip |
University of California, San Diego,UCSD |
Medical Imaging and Perception II |
| CDFI: Cross Domain Feature Interaction for Robust Bronchi Lumen Detection |
Jiasheng Xu, Tianyi Zhang, Yangqian Wu, Jie Yang, Guang-Zhong Yang, Yun Gu |
Shanghai Jiao Tong University,Shanghai Jiaotong University,SJTU |
Medical Imaging and Perception II |
| Real-Time Constrained 6D Object-Pose Tracking of an In-Hand Suture Needle for Minimally Invasive Robotic Surgery |
Zih-Yun Chiu, Florian Richter, Michael Yip |
University of California, San Diego |
Award Finalists 1 |
| Exploring Robot-Assisted Optical Coherence Elastography for Surgical Palpation |
Yeon Hee Chang, Elan Ahronovich, Nabil Simaan, Cheol Song |
DGIST,Vanderbilt ARMA,Vanderbilt University |
Award Finalists 1 |
| Locate before Segment: Topology-Guided Retinal Layer Segmentation in Optical Coherence Tomography Images |
Ye Lu, Yutian Shen, Xiaohan Xing, Max Qing Hu Meng |
The Chinese University of Hong Kong |
Medical Imaging and Perception II |
| Visual Tracking of Needle Tip in 2D Ultrasound Based on Global Features in a Siamese Architecture |
Wanquan Yan, Qingpeng Ding, Jianghua Chen, Kim Yan, Raymond Shing-yan Tang, Shing Shin Cheng |
The Chinese University of HongKong,The Chinese University of Hong Kong,The Chinese University of Hong Kong, Department of Medicine and |
Medical Imaging and Perception III |
| Model-Based Pose Estimation of Steerable Catheters under Bi-Plane Image Feedback |
Jared Lawson, Rohan Chitale, Nabil Simaan |
Vanderbilt University,Vanderbilt University Medical Center |
Medical Imaging and Perception III |
| Pose Quality Prediction for Vision Guided Robotic Shoulder Arthroplasty |
Morgan Windsor, Jing Peng, Ashish Gupta, Peter Pivonka, Michael J Milford |
Queensland University of Technology,Queensland University of Technology (QUT) |
Medical Imaging and Perception III |
| Image Segmentation for Continuum Robots from a Kinematic Prior |
Connor Watson, Anna Nguyen, Tania Morimoto |
Morimoto Lab, UCSD,University of California San Diego |
Medical Imaging and Perception III |
| Robust Collaborative 3D Object Detection in Presence of Pose Errors |
Yifan Lu, Quanhao Li, Baoan Liu, Mehrdad Dianati, Chen Feng, Siheng Chen, Yanfeng Wang |
Shanghai Jiao Tong University,Nanjing University,Meta,University of Warwick,New York University |
Object Detection I |
| Joint Semi-Supervised and Active Learning Via 3D Consistency for 3D Object Detection |
Sihwan Hwang, Sanmin Kim, YoungSeok Kim, Dongsuk Kum |
Korea Advanced Institute of Science and Technology,KAIST |
Object Detection I |
| StereoVoxelNet: Real-Time Obstacle Detection Based on Occupancy Voxels from a Stereo Camera Using Deep Neural Networks |
Hongyu Li, Zhengang Li, Neset Unver Akmandor, Huaizu Jiang, Yanzhi Wang, Taskin Padir |
Northeastern University |
Object Detection I |
| Perceiving Unseen 3D Objects by Poking the Objects |
Linghao Chen, Yunzhou Song, Hujun Bao, Xiaowei Zhou |
Zhejiang University |
Object Detection I |
| MonoPGC: Monocular 3D Object Detection with Pixel Geometry Contexts |
Zizhang Wu, Yuanzhu Gan, Wang Robin, Guilian Chen, Jian Pu |
Zongmu Technology,Fudan University |
Object Detection I |
| CrossDTR: Cross-View and Depth-Guided Transformers for 3D Object Detection |
Ching-yu Tseng, Yi-rong Chen, Hsin-ying Lee, Tsung-han Wu, Wen-chin Chen, Winston Hsu |
National Taiwan University |
Object Detection I |
| DOTIE - Detecting Objects through Temporal Isolation of Events Using a Spiking Architecture |
Manish Nagaraj, Chamika Mihiranga Liyanagedera, Kaushik Roy |
Purdue University |
Object Detection I |
| CEAFFOD: Cross-Ensemble Attention-Based Feature Fusion Architecture towards a Robust and Real-Time UAV-Based Object Detection in Complex Scenarios |
Ahmed Elhagry, Hang Dai, Abdulmotaleb El Saddik, Wail Gueaieb, Giulia De Masi |
MBZUAI,Mohamed bin Zayed University of Artificial Intelligence,University of Ottawa,Technology Innovation Institute |
Object Detection I |
| Test Time Domain Adaptation for Monocular Depth Estimation |
Zhi Li, Shaoshuai Shi, Bernt Schiele, Dengxin Dai |
Max Planck Institute for Informatics,Max Planck,ETH Zurich |
Depth Estimation and RGB-D Sensing |
| TODE-Trans: Transparent Object Depth Estimation with Transformer |
Kang Chen, Shaochen Wang, Beihao Xia, Dongxu Li, Zhen Kan, Bin Li |
University of Science and Technology of China,Huazhong University of Science and Technology |
Depth Estimation and RGB-D Sensing |
| Learning Depth Completion of Transparent Objects Using Augmented Unpaired Data |
Floris Marc Arden Erich, Bruno Leme, Noriaki Ando, Ryo Hanai, Yukiyasu Domae |
National Institute of Advanced Industrial Science and Technology,University of Florida,National Institute of Industrial Science and Technology(AIST),The National Institute of Advanced Industrial Science and Techno |
Depth Estimation and RGB-D Sensing |
| Lightweight Monocular Depth Estimation Via Token-Sharing Transformer |
Dong-jae Lee, Jae Young Lee, Hyounguk Shon, Eojindl Yi, Yeong-hun Park, Sung-sik Cho, Junmo Kim |
Korea Advanced Institute of Science & Technology (KAIST),Korea Advanced Institute of Science and Technology,KAIST,Hyundai Mobis |
Depth Estimation and RGB-D Sensing |
| Improved Event-Based Dense Depth Estimation Via Optical Flow Compensation |
Dianxi Shi, Luoxi Jing, Ruihao Li, Zhe Liu, Huachi Xu, Lin Wang, Yi Zhang |
Defense Innovation Institute,Peking University,National University of Defense Technology |
Depth Estimation and RGB-D Sensing |
| TTCDist: Fast Distance Estimation from an Active Monocular Camera Using Time-To-Contact |
Levi Burner, Nitin Sanket, Cornelia Fermuller, Yiannis Aloimonos |
University of Maryland, College Park,University of Maryland |
Depth Estimation and RGB-D Sensing |
| STEPS: Joint Self-Supervised Nighttime Image Enhancement and Depth Estimation |
Yupeng Zheng, Chengliang Zhong, Pengfei Li, Huan-ang Gao, Yuhang Zheng, Bu Jin, Ling Wang, Hao Zhao, Guyue Zhou, Qichao Zhang, Dongbin Zhao |
Institute of Automation,Chinese Academy of Sciences,Tsinghua University,Institute for AI Industry Research (AIR), Tsinghua University,Beihang University,Institute of Automation, Chinese Academy of Sciences,Xi’an Research Institute of High-Tech,Chinese Academy of Sciences |
Depth Estimation and RGB-D Sensing |
| FG-Depth: Flow-Guided Unsupervised Monocular Depth Estimation |
Junyu Zhu, Lina Liu, Yong Liu, Wanlong Li, Feng Wen, Hongbo Zhang |
zhejiang University,Zhejiang University,Beijing Huawei Digital Technologies Co., Ltd.,Huawei Technologies Co., Ltd,Huawei Technologies |
Depth Estimation and RGB-D Sensing |
| Light-Weight Pointcloud Representation with Sparse Gaussian Process |
Mahmoud Ali, Lantao Liu |
Indiana University |
Depth Estimation and RGB-D Sensing |
| Test-Time Synthetic-To-Real Adaptive Depth Estimation |
Eojindl Yi, Junmo Kim |
KAIST |
Depth Estimation and RGB-D Sensing |
| Unseen Object Instance Segmentation with Fully Test-Time RGB-D Embeddings Adaptation |
Lu Zhang, Siqi Zhang, Xu Yang, Hong Qiao, Zhiyong Liu |
Institute of Automation, Chinese Academy of Science,Chinese Academy of Sciences, Institute of Automation,Institute of Automation, Chinese Academy of Sciences,Institute of Automation Chinese Academy of Sciences |
Depth Estimation and RGB-D Sensing |
| Robust Double-Encoder Network for RGB-D Panoptic Segmentation |
Matteo Sodano, Federico Magistri, Tiziano Guadagnino, Jens Behley, Cyrill Stachniss |
Photogrammetry and Robotics Lab, University of Bonn,University of Bonn,Sapienza University of Rome |
Depth Estimation and RGB-D Sensing |
| Explain What You See: Open-Ended Segmentation and Recognition of Occluded 3D Objects |
Hamed Ayoobi, Hamidreza Kasaei, Ming Cao, Rineke Verbrugge, Bart Verheij |
Imperial College London,University of Groningen |
3D Vision |
| GMCR: Graph-Based Maximum Consensus Estimation for Point Cloud Registration |
Michael Gentner, Prajval Kumar Murali, Mohsen Kaboli |
BMW Group and Technical University of Munich,BMW Group and University of Glasgow,BMW & Radboud University |
3D Vision |
| Toward Cooperative 3D Object Reconstruction with Multi-Agent |
Xiong Li, Zhenyu Wen, Zhou Leiqiang, Chenwei Li, Yejian Zhou, Taotao Li, Zhen Hong |
Zhejiang University of Technology,Zhejiang University of technology,Zhejiang |
3D Vision |
| SwinDepth: Unsupervised Depth Estimation Using Monocular Sequences Via Swin Transformer and Densely Cascaded Network |
Dongseok Shim, H. Jin Kim |
Seoul National University |
3D Vision |
| GAN-Based Interactive Reinforcement Learning from Demonstration and Human Evaluative Feedback |
Jie Huang, Jiangshan Hao, Rongshun Juan, Randy Gomez, Keisuke Nakamura, Guangliang Li |
Ocean University of China,Tianjin University,Honda Research Institute Japan Co., Ltd. |
Learning from Demonstration |
| Demonstration-Guided Optimal Control for Long-Term Non-Prehensile Planar Manipulation |
Teng Xue, Hakan Girgin, Teguh Santoso Lembono, Sylvain Calinon |
Idiap Research Institute, EPFL,Idiap Research Institute |
Learning from Demonstration |
| Learning Reward Functions for Robotic Manipulation by Observing Humans |
Minttu Alakuijala, Gabriel Dulac-arnold, Julien Mairal, Jean Ponce, Cordelia Schmid |
Inria,Google,INRIA,Ecole Normale Supérieure |
Learning from Demonstration |
| Data-Driven Stochastic Motion Evaluation and Optimization with Image by Spatially-Aligned Temporal Encoding |
Takeru Oba, Norimichi Ukita |
Toyota Technological Institute |
Learning from Demonstration |
| Demonstration-Bootstrapped Autonomous Practicing Via Multi-Task Reinforcement Learning |
Abhishek Gupta, Corey Lynch, Brandon Kinman, Garrett Peake, Sergey Levine, Karol Hausman |
University of Washington,Google Brain,Google LLC,Google Inc,UC Berkeley |
Learning from Demonstration |
| Minimizing Human Assistance: Augmenting a Single Demonstration for Deep Reinforcement Learning |
Abraham George, Alison Bartsch, Amir Barati Farimani |
Carnegie Mellon University |
Learning from Demonstration |
| Learning Robotic Cutting from Demonstration: Non-Holonomic DMPs Using the Udwadia-Kalaba Method |
Artūras Straižys, Michael Burke, Subramanian Ramamoorthy |
University of Edinburgh,Monash University,The University of Edinburgh |
Learning from Demonstration |
| KRIS: A Novel Device for Kinesthetic Corrective Feedback During Robot Motion |
Jorn Verhggen, Kim Baraka |
Vrije universiteit,Vrije Universiteit Amsterdam |
Learning from Demonstration |
| Guided Learning from Demonstration for Robust Transferability |
Fouad Sukkar, Victor Hernandez Moreno, Teresa A. Vidal-Calleja, Jochen Deuse |
University of Technology Sydney |
Learning from Demonstration |
| One-Shot Visual Imitation Via Attributed Waypoints and Demonstration Augmentation |
Matthew Chang, Saurabh Gupta |
University of Illinois at Urbana-Champaign,UIUC |
Learning from Demonstration |
| Show Me What You Want: Inverse Reinforcement Learning to Automatically Design Robot Swarms by Demonstration |
Ilyes Gharbi, Jonas Kuckling, David Garzon Ramos, Mauro Birattari |
Université libre de Bruxelles,Université Libre de Bruxelles |
Learning from Demonstration |
| Immersive Demonstrations Are the Key to Imitation Learning |
Kelin Li, Digby Chappell, Nicolas Rojas |
Imperial College London |
Learning from Demonstration |
| DreamWaQ: Learning Robust Quadrupedal Locomotion with Implicit Terrain Imagination Via Deep Reinforcement Learning |
I Made Aswin Nahrendra, Byeongho Yu, Hyun Myung |
KAIST,KAIST (Korea Advanced Institute of Science and Technology) |
Learning for Locomotion |
| Learning Low-Frequency Motion Control for Robust and Dynamic Robot Locomotion |
Siddhant Gangapurwala, Luigi Campanaro, Ioannis Havoutis |
Sony AI,University of Oxford |
Learning for Locomotion |
| OPT-Mimic: Imitation of Optimized Trajectories for Dynamic Quadruped Behaviors |
Yuni Fuchioka, Zhaoming Xie, Michiel Van De Panne |
University of British Columbia,Stanford University |
Learning for Locomotion |
| Learning to Walk by Steering: Perceptive Quadrupedal Locomotion in Dynamic Environments |
Mingyo Seo, Ryan Gupta, Yifeng Zhu, Alexy Skoutnev, Luis Sentis, Yuke Zhu |
The University of Texas at Austin,University of Texas at Austin |
Learning for Locomotion |
| Legs As Manipulator: Pushing Quadrupedal Agility Beyond Locomotion |
Xuxin Cheng, Ashish Kumar, Deepak Pathak |
Carnegie Mellon University,UC Berkeley |
Learning for Locomotion |
| Force Control for Robust Quadruped Locomotion: A Linear Policy Approach |
Aditya Shirwatkar, Vamshi Kumar Kurva, Devaraju Vinoda, Aman Singh, Aditya Varma Sagi, Himanshu Lodha, Bhavya Giri Goswami, Shivam Sood, Ketan Nehete, Shishir Kolathaya |
Indian Institute of Science Bengaluru,IISc,Indian Institute of Science, Bengaluru,Indian Institute of Science,Stoch Lab, Indian Institute of Science, Bengaluru,Indian Institute of Science (IISc), Bengaluru,Indian Institute of Technology Kharagpur |
Learning for Locomotion |
| Advanced Skills through Multiple Adversarial Motion Priors in Reinforcement Learning |
Eric Vollenweider, Marko Bjelonic, Victor Klemm, Nikita Rudin, Joonho Lee, Marco Hutter |
ETH, Microsoft,ETH Zurich,ETH Zurich, NVIDIA,ETH Zurich Robotic Systems Laboratory |
Learning for Locomotion |
| Deep Reinforcement Learning Based Personalized Locomotion Planning for Lower-Limb Exoskeletons |
Javad K. Mehr, Edward Guo, Mojtaba Akbari, Vivian K. Mushahwar, Mahdi Tavakoli |
University of Alberta,University of Calgary |
Learning for Locomotion |
| Expanding Versatility of Agile Locomotion through Policy Transitions Using Latent State Representation |
Guilherme Christmann, Jonathan Hans Soeseno, Ying-sheng Luo, Wei-chao Chen |
Inventec Corporation,Inventec Inc. |
Learning for Locomotion |
| Sim-To-Real Transfer for Quadrupedal Locomotion Via Terrain Transformer |
Hang Lai, Weinan Zhang, Xialin He, Chen Yu, Zheng Tian, Yong Yu, Jun Wang |
Shanghai Jiao Tong University,ShanghaiTech University,University College London |
Learning for Locomotion |
| Agile and Versatile Robot Locomotion Via Kernel-Based Residual Learning |
Milo Carroll, Zhaocheng Liu, Mohammadreza Kasaei, Zhibin Li |
Entreprenuer First,The University of Edinburgh,University of Edinburgh,University College London |
Learning for Locomotion |
| DribbleBot: Dynamic Legged Manipulation in the Wild |
Yandong Ji, Gabriel Margolis, Pulkit Agrawal |
MIT,Massachusetts Institute of Technology |
Learning for Locomotion |
| Knowledge Distillation for Feature Extraction in Underwater VSLAM |
Jinghe Yang, Mingming Gong, Girish N. Nair, Jung Hoon Lee, Jason Monty, Ye Pu |
The University of Melbourne,University of Melbourne |
Marine Robotics III |
| OysterNet: Enhanced Oyster Detection Using Simulation |
Xiaomin Lin, Nitin Sanket, Nare Karapetyan, Yiannis Aloimonos |
University of Maryland,University of Maryland, College Park |
Marine Robotics III |
| SyreaNet: A Physically Guided Underwater Image Enhancement Framework Integrating Synthetic and Real Images |
Junjie Wen, Jinqiang Cui, Zhenjun Zhao, Ruixin Yan, Zhi Gao, Lihua Dou, Ben M. Chen |
The Chinese University of Hong Kong,Peng Cheng Laboratory,Temasek Laboratories @ NUS,Beijing Institue of Technology,Chinese University of Hong Kong |
Marine Robotics III |
| Real-Time Dense 3D Mapping of Underwater Environments |
Weihan Wang, Bharat Joshi, Nathaniel Burgdorfer, Konstantinos Batsos, Alberto Quattrini Li, Philippos Mordohai, Ioannis Rekleitis |
Stevens Institute of Technology,University of South Carolina,Stevens Institute of Technoiogy,Dartmouth College |
Marine Robotics III |
| SM/VIO: Robust Underwater State Estimation Switching between Model-Based and Visual Inertial Odometry |
Bharat Joshi, Hunter Damron, Sharmin Rahman, Ioannis Rekleitis |
University of South Carolina,Amazon |
Marine Robotics III |
| Image-Based Visual Servoing Switchable Leader-Follower Control of Heterogeneous Multi-Agent Underwater Robot System |
Kanzhong Yao, Nathalie Bauschmann, Thies Lennart Alff, Wei Cheah, Daniel Andre Duecker, Keir Groves, Ognjen Marjanovic, Simon Watson |
University of Manchester,Hamburg University of Technology,Technische Universität Hamburg,The University of Manchester,Technical University of Munich (TUM) |
Marine Robotics III |
| Buoyancy Enabled Autonomous Underwater Construction with Cement Blocks |
Samuel Lensgraf, Devin Balkcom, Alberto Quattrini Li |
Dartmouth College |
Marine Robotics III |
| Mapping Waves with an Uncrewed Surface Vessel Via Gaussian Process Regression |
Thomas Sears, Michael Riley Cooper, Joshua Marshall |
Queen’s University |
Marine Robotics III |
| Enforcing Constraints for Dynamic Obstacle Avoidance by Compliant Robots |
Leonidas Koutras, Konstantinos Vlachos, George Kanakis, Fotios Dimeas, Zoe Doulgeri, George Rovithakis |
Aristotle University of Thessaloniki,Aristotel University of Thessaloniki |
Compliance and Impedance Control |
| Increasing Admittance of Industrial Robots by Velocity Feedback Inner-Loop Shaping |
Kangwagye Samuel, Kevin Haninger, Sehoon Oh |
DGIST,Fraunhofer IPK |
Compliance and Impedance Control |
| Bounded Compensation with Friction Estimation for Accurate Motion Tracking and Compliant Behavior of Industrial Manipulators |
Dongwoo Ko, Donghyeon Lee, Wan Kyun Chung, Keehoon Kim |
POSTECH,Pohang University of Science and Technology(POSTECH),POSTECH, Pohang University of Science and Technology |
Compliance and Impedance Control |
| A Passivity-Based Approach on Relocating High-Frequency Robot Controller to the Edge Cloud |
Xiao Chen, Hamid Sadeghian, Lingyun Chen, Mario Troebinger, Abdalla Swikir, Abdeldjallil Naceri, Sami Haddadin |
Technical University of Munich |
Compliance and Impedance Control |
| A Framework for Simultaneous Workpiece Registration in Robotic Machining Applications |
Steffan Lloyd, Rishad Irani, Mojtaba Ahmadi |
Carleton University |
Compliance and Impedance Control |
| Contact Force Control with Continuously Compliant Robotic Legs |
Robin Bendfeld, C. David Remy |
University of Stuttgart |
Award Finalists 1 |
| Generalization of Impact Response Factors for Proprioceptive Collaborative Robots |
Carlos Relaño, Daniel Sanz-merodio, Miguel López Estévez, Concepción A. Monje |
University Carlos III of Madrid,Arquimea Research Center |
Compliance and Impedance Control |
| Robotic Fastening with a Manual Screwdriver |
Ling Tang, Yan-Bin Jia |
Iowa State University |
Compliance and Impedance Control |
| Model and Acceleration-Based Pursuit Controller for High Performance Autonomous Racing |
Jonathan Becker, Nadine Imholz, Luca Schwarzenbach, Edoardo Ghignone, Nicolas Baumann, Michele Magno |
ETH Zurich,ETH |
Robot Control |
| Extremum Seeking-Based Adaptive Sliding Mode Control with Sliding Perturbation Observer for Robot Manipulators |
Muhammad Hamza Khan, Min Cheol Lee |
Pusan National University.,Pusan National University |
Robot Control |
| Experimental Validation of Functional Iterative Learning Control on a One-Link Flexible Arm |
Sjoerd Drost, Pietro Pustina, Franco Angelini, Alessandro De Luca, Gerwin Smit, Cosimo Della Santina |
Delft University of Technology, Delft, The Netherlands,Sapienza University of Rome,University of Pisa,Delft University of Technology,TU Delft |
Robot Control |
| Robust Output Feedback Controller for a Serial Robotic Manipulator with Unknown Nonlinearities and External Disturbances |
Mohammad Al Saaideh, Almuatazbellah Boker, Mohammad Al Janaideh |
Memorial University of Newfoundland,Virginia Tech,Memorial University &University of Toronto |
Robot Control |
| Collaborative Control Based on Payload Leading for Multi-Quadrotors Transportation Systems |
Yuan Ping, Mingming Wang, Juntong Qi, Chong Wu, Jinjin Guo |
Tianjin University,Shanghai University,EFY Intelligent Control (Tianjin) Technology Co., Ltd |
Robot Control |
| Torque Control with Joints Position and Velocity Limits Avoidance |
Venus Pasandi, Daniele Pucci |
Femto-st Institute,Italian Institute of Technology |
Robot Control |
| Low-Level Controller in Response to Changes in Quadrotor Dynamics |
Jaekyung Cho, Chan Kim, Mohamed Khalid M Jaffar, Michael W. Otte, Seong-woo Kim |
Seoul national university,Seoul National University,University of Maryland, College Park,University of Maryland |
Robot Control |
| Biodegradable Origami Gripper Actuated with Gelatin Hydrogel for Aerial Sensor Attachment to Tree Branches |
Christian Geckeler, Benito Armas Pizzani, Stefano Mintchev |
ETH Zürich,ETH Zurich |
Manipulation and Control |
| PARSEC: An Aerial Platform for Autonomous Deployment of Self-Anchoring Payloads on Natural Vertical Surfaces |
Patrick Spieler, Skylar Wei, Monica Li, Andrew Galassi, Kyle Uckert, Arash Kalantari, Joel Burdick |
JPL,Caltech,UC Berkeley,Jet Propulsion Laboratory,NASA JPL,California Institute of Technology |
Manipulation and Control |
| Autonomous Control for Orographic Soaring of Fixed-Wing UAVs |
Tom Suys, Sunyou Hwang, Guido De Croon, Bart Remes |
Delft University of Technology,TU Delft |
Manipulation and Control |
| Stable Contact Guaranteeing Motion/Force Control for an Aerial Manipulator on an Arbitrarily Tilted Surface |
Jeonghyun Byun, Byeongjun Kim, Changhyeon Kim, Donggeon David Oh, H. Jin Kim |
Seoul National University |
Manipulation and Control |
| Design and Control of a Micro Overactuated Aerial Robot with an Origami Delta Manipulator |
Eugenio Cuniato, Christian Geckeler, Maximilian Brunner, Dario Strübin, Elia Bähler, Fabian Ospelt, Marco Tognon, Stefano Mintchev, Roland Siegwart |
ETH Zurich,ETH Zürich,Inria Rennes-Bretagne Atlantique |
Manipulation and Control |
| Simplifying Aerial Manipulation Using Intentional Collisions |
Mark Nail, Nicholas Janne, Olivia Ma, Gabriel Arellano, Ella Atkins, Brent Gillespie |
University of Michigan |
Manipulation and Control |
| Hierarchical Whole-Body Control of the Cable-Suspended Aerial Manipulator Endowed with Winch-Based Actuation |
Yuri Sarkisov, Andre Coelho, Maihara Gabrieli Santos, Min Jun Kim, Dzmitry Tsetserukou, Christian Ott, Konstantin Kondak |
SberAutoTech,German Aerospace Center (DLR),Instituto Tecnologico de Aeronautica,KAIST,Toyohashi University of Technology,TU Wien,German Aerospace Center |
Manipulation and Control |
| Heading for the Abyss: Control Strategies for Exploiting Swinging of a Descending Tethered Aerial Robot |
Max Polzin, Frank Centamori, Josie Hughes |
EPFL |
Manipulation and Control |
| Vector Field Aided Trajectory Tracking by a 10-Gram Flapping-Wing Micro Aerial Vehicle |
Abdoullah Ndoye, José De Jesús Castillo Zamora, Sabrine Samorah-laki, Romain Miot, Edwin Van Ruymbeke, Franck Ruffier |
Aix Marseille Université, CNRS, ISM and Gipsa-Lab,Aix-Marseille Universite, ISM CNRS,Aix Marseille Université, CNRS, ISM,XTIM - Bionic Bird,CNRS / Aix-Marseille Univ. |
Manipulation and Control |
| Globally Defined Dynamic Modelling and Geometric Tracking Controller Design for Aerial Manipulator |
Byeongjun Kim, Dongjae Lee, Jeonghyun Byun, H. Jin Kim |
Seoul National University |
Manipulation and Control |
| FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors |
Nate Simon, Allen Z. Ren, Alex Pique, David Snyder, Daphne Barretto, Marcus Hultmark, Anirudha Majumdar |
Princeton University |
Manipulation and Control |
| AutoCharge: Autonomous Charging for Perpetual Quadrotor Missions |
Alessandro Saviolo, Jeffrey Mao, Roshan Balu Thalaivirithan Margabandu Balakr, Vivek Radhakrishnan, Giuseppe Loianno |
New York University,Technology Innovation Institute, New York University |
Manipulation and Control |
| DQN-Based On-Line Path Planning Method for Automatic Navigation of Miniature Robots |
Jialin Jiang, Lidong Yang, Li Zhang |
The Chinese University of HONG KONG,The Hong Kong Polytechnic University,The Chinese University of Hong Kong |
Micro Robotics |
| Rendezvous and Docking of Magnetic Helical Microrobots Along Arc Orbits for Field-Directed Assembly and Disassembly |
Shuideng Wang, Zejie Yu, Chaojian Hou, Kun Wang, Lixin Dong |
City University of Hongkong,City University of Hong Kong |
Micro Robotics |
| MRI-Powered Magnetic Miniature Capsule Robot with HIFU-Controlled On-Demand Drug Delivery |
Mehmet Efe Tiryaki, Fatih DoÄŸangün, Cem Balda Dayan, Paul Wrede, Metin Sitti |
Max Plank Institute for Intelligent Systems,Max Planck Institute for Intelligent Systems,Max Planck Institute for Intelligent Systems Stuttgart,Max-Planck Institute for Intelligent Systems |
Award Finalists 1 |
| Structural Design and Frequency Tuning of Piezoelectric Energy Harvesters Based on Topology Optimization |
Abbas Homayouni-amlashi, Micky Rakotondrabe, Abdenbi Mohand-Ousaid |
FEMTO-ST Institute, Université Bourgogne Franche,Laboratoire Génie de Production (LGP),University of Franche-Comte |
Micro Robotics |
| Input-Output Boundedness of a Magnetically-Actuated Helical Device |
Leendert-Jan Wouter Ligtenberg, Islam S. M. Khalil |
University of Twente |
Micro Robotics |
| Atomic-Level Tracking and Analyzing of Quantum-Dot Motion Steered by an Electrostatic Field Positioned by a Nanorobotic Manipulation Tip |
Zhi Qu, Wenqi Zhang, Lixin Dong |
City University of Hong Kong,City University of HongKong |
Micro Robotics |
| 3D-Printed Adaptive Microgripper Driven by Thin-Film NiTi Actuators |
Sukjun Kim, Sarah Bergbreiter |
Carnegie Mellon University |
Micro Robotics |
| Automatic Cell Rotation Method Based on Deep Reinforcement Learning |
Huiying Gong, Yujie Zhang, Yaowei Liu, Qili Zhao, Xin Zhao, Mingzhu Sun |
Nankai University |
Micro Robotics |
| Noncontact Particle Manipulation on Water Surface with Ultrasonic Phased Array System and Microscopic Vision |
Yexin Zhang, Jiaqi Li, Yuyu Jia, Teng Li, Hu Su, Song Liu, David C. Jeong, Yang Wang |
ShanghaiTech University,Tsinghua University,Institute of Automation, Chinese Academy of Science,Santa Clara University,Shanghaitech University |
Micro Robotics |
| Real-Time Acoustic Holography with Iterative Unsupervised Learning for Acoustic Robotic Manipulation |
Chengxi Zhong, Zhenhuan Sun, Teng Li, Hu Su, Song Liu |
ShanghaiTech University,Shanghaitech University,Tsinghua University,Institute of Automation, Chinese Academy of Science |
Micro Robotics |
| ROSMC: A High-Level Mission Operation Framework for Heterogeneous Robotic Teams |
Ryo Sakagami, Sebastian Georg Brunner, Andreas Dömel, Armin Wedler, Freek Stulp |
German Aerospace Center (DLR),DLR German Aerospace Center, Robotics and Mechatronics Center,DLR - German Aerospace Center,DLR - Deutsches Zentrum für Luft- und Raumfahrt e.V. |
Multi-Robot Systems III |
| Non-Cooperative Stochastic Target Encirclement by Anti-Synchronization Control Via Range-Only Measurement |
Fen Liu, Shenghai Yuan, Wei Meng, Rong Su, Lihua Xie |
Guangdong University of Technology,NANYANG TECHNOLOGICAL UNIVERSITY,Nanyang Technological University,NanyangTechnological University |
Multi-Robot Systems III |
| Estimation of Continuous Environments by Robot Swarms: Correlated Networks and Decision-Making |
Mohsen Raoufi, Pawel Romanczuk, Heiko Hamann |
Technical University of Berlin,Humboldt-Unviersity Berkin,University of Konstanz |
Multi-Robot Systems III |
| FogROS2: An Adaptive Platform for Cloud and Fog Robotics Using ROS 2 |
Jeffrey Ichnowski, Kaiyuan Chen, Karthik Dharmarajan, Simeon Oluwafunmilore Adebola, Michael Danielczuk, Victor Mayoral-Vilches, Nikhil Jha, Hugo Zhan, Edith Llontop, Derek Xu, Camilo Buscaron, John Kubiatowicz, Ion Stoica, Joseph E. Gonzalez, Ken Goldberg |
Carnegie Mellon University,University of California, Berkeley,UC Berkeley,Klagenfurt University,University of California, Berkely,Anytime.ai |
Multi-Robot Systems III |
| Stackelberg Games for Learning Emergent Behaviors During Competitive Autocurricula |
Boling Yang, Liyuan Zheng, Lillian J. Ratliff, Byron Boots, Joshua R. Smith |
University of Washington |
Multi-Robot Systems III |
| On Legible and Predictable Robot Navigation in Multi-Agent Environments |
Jean-Luc Bastarache, Christopher Nielsen, Stephen L. Smith |
University of Waterloo |
Multi-Robot Systems III |
| Explainable Action Advising for Multi-Agent Reinforcement Learning |
Yue (Sophie) Guo, Joseph Campbell, Simon Stepputtis, Ruiyu Li, Dana Hughes, Fei Fang, Katia Sycara |
Carnegie Mellon University |
Multi-Robot Systems III |
| A Complete Set of Connectivity-Aware Local Topology Manipulation Operations for Robot Swarms |
Karthik Soma, Koresh Khateri, Mahdi Pourgholi, Mohsen Montazeri, Lorenzo Sabattini, Giovanni Beltrame |
École Polytechnique de Montréal,Shahid Beheshti University,University of Modena and Reggio Emilia,Ecole Polytechnique de Montreal |
Multi-Robot Systems III |
| Decentralized Multi-Agent Exploration with Limited Inter-Agent Communications |
Hans He, Alec Koppel, Amrit Bedi, Daniel Stilwell, Mazen Farhood, Benjamin Adams Biggs |
Virginia Tech,JP Morgan Chase,University of Maryland, College Park,Virginia Polytechnic Institute and State University |
Multi-Robot Systems III |
| A Distributed Online Optimization Strategy for Cooperative Robotic Surveillance |
Lorenzo Pichierri, Guido Carnevale, Lorenzo Sforni, Andrea Testa, Giuseppe Notarstefano |
University of Bologna,Alma Mater Studiorum - Università di Bologna |
Multi-Robot Systems III |
| Risk-Aware Recharging Rendezvous for a Collaborative Team of UAVs and UGVs |
Ahmad Bilal Asghar, Guangyao Shi, Nare Karapetyan, James Humann, Jean-paul Reddinger, James Dotterweich, Pratap Tokekar |
University of Maryland,DEVCOM Army Research Laboratory,Engility Corp. |
Multi-Robot Systems III |
| Cross-Agent Relocalization for Decentralized Collaborative SLAM |
Philipp Baenninger, Ignacio Alzugaray, Marco Karrer, Margarita Chli |
ETH Zurich,Imperial College London |
Multi-Robot Systems III |
| Planning with Occluded Traffic Agents Using Bi-Level Variational Occlusion Models |
Filippos Christianos, Peter Karkus, Boris Ivanovic, Stefano V. Albrecht, Marco Pavone |
University of Edinburgh,NVIDIA,Stanford University |
Intelligent Transportation Systems III |
| Robust Forecasting for Robotic Control: A Game-Theoretic Approach |
Shubhankar Agarwal, David Fridovich-Keil, Sandeep Chinchali |
The University of Texas at Austin |
Intelligent Transportation Systems III |
| Spatial-Temporal-Aware Safe Multi-Agent Reinforcement Learning of Connected Autonomous Vehicles in Challenging Scenarios |
Zhili Zhang, Songyang Han, Jiangwei Wang, Fei Miao |
University of Connecticut |
Intelligent Transportation Systems III |
| Analyzing Infrastructure LiDAR Placement with Realistic LiDAR Simulation Library |
Xinyu Cai, Wentao Jiang, Runsheng Xu, Wenquan Zhao, Jiaqi Ma, Si Liu, Yikang Li |
Shanghai AI Laboratory,Beihang University,UCLA,Harbin Institute of Technology,University of California, Los Angeles,Sensetime Ltd. |
Intelligent Transportation Systems III |
| Uncertainty Quantification of Collaborative Detection for Self-Driving |
Sanbao Su, Yiming Li, Sihong He, Songyang Han, Chen Feng, Caiwen Ding, Fei Miao |
University of Connecticut,New York University |
Self-Driving Cars I |
| WS-3D-Lane: Weakly Supervised 3D Lane Detection with 2D Lane Labels |
Jianyong Ai, Wenbo Ding, Jiuhua Zhao, Jiachen Zhong |
SAIC AI Lab |
Self-Driving Cars I |
| One Training for Multiple Deployments: Polar-Based Adaptive BEV Perception for Autonomous Driving |
Huitong Yang, Xuyang Bai, Xinge Zhu, Yuexin Ma |
ShanghaiTech University,Hong Kong University of Science and Technology,CUHK |
Self-Driving Cars I |
| Deep Occupancy-Predictive Representations for Autonomous Driving |
Eivind Meyer, Lars Frederik Peiss, Matthias Althoff |
Technische Universität München |
Self-Driving Cars I |
| PriorLane: A Prior Knowledge Enhanced Lane Detection Approach Based on Transformer |
Qibo Qiu, Haiming Gao, Wei Hua, Gang Huang, Xiaofei He |
Zhejiang Lab,Zhejiang University |
Self-Driving Cars I |
| Reinforcement Learning with Probabilistically Safe Control Barrier Functions for Ramp Merging |
Soumith Udatha, Yiwei Lyu, John Dolan |
Carnegie Mellon University |
Self-Driving Cars I |
| Self-Improving Safety Performance of Reinforcement Learning Based Driving with Black-Box Verification Algorithms |
Resul Dagdanov, Halil Durmuş, Nazim Ure |
Eatron Yazilim ve Muhendislik Teknolojileri A.S.,İstanbul Technical University,Istanbul Technical University |
Self-Driving Cars I |
| Multi-Source Domain Adaptation for Unsupervised Road Defect Segmentation |
JONGMIN YU, Hyeontaek Oh, Sebastiano Fichera, Paolo Paoletti, Shan Luo |
King’s College London,Korea Advanced Institute of Science and Technology,University of Liverpool |
Self-Driving Cars I |
| A Contextual Bandit Approach for Learning to Plan in Environments with Probabilistic Goal Configurations |
Sohan Rudra, Saksham Goel, Anirban Santara, Claudio Gentile, Laurent Perron, Fei Xia, Vikas Sindhwani, Carolina Parada, Gaurav Aggarwal |
Google,Google Inc,Google Brain, NYC |
Motion and Path Planning III |
| Safe and Efficient Navigation in Extreme Environments Using Semantic Belief Graphs |
M. Fadhil Ginting, Sung Kyun Kim, Oriana Peltzer, Joshua Ott, Sunggoo Jung, Mykel Kochenderfer, Ali-Akbar Agha-Mohammadi |
Stanford University,NASA Jet Propulsion Laboratory, Caltech,JPL,NASA-JPL, Caltech |
Motion and Path Planning III |
| Risk-Aware Neural Navigation from BEV Input for Interactive Driving |
Suzanna Jiwani, Xiao Li, Sertac Karaman, Daniela Rus |
Massachusetts Institute of Technology,MIT |
Motion and Path Planning III |
| Informable Multi-Objective and Multi-Directional RRT* System for Robot Path Planning |
Bruce Jk Huang, Yingwen Tan, Dongmyeong Lee, Vishnu Desaraju, J.W Grizzle |
University of Michigan,Woven Planet North America |
Motion and Path Planning III |
| Leveraging Scene Embeddings for Gradient-Based Motion Planning in Latent Space |
Jun Yamada, Chia-Man Hung, Jack Collins, Ioannis Havoutis, Ingmar Posner |
University of Oxford,Oxford University |
Motion and Path Planning III |
| Sample-Driven Connectivity Learning for Motion Planning |
Sihui Li, Neil Dantam |
Colorado School of Mines |
Motion and Path Planning III |
| Online Coverage Path Planning Scheme for a Size-Variable Robot |
M. A. Viraj J. Muthugala, Bhagya Samarakoon, Rajesh Elara Mohan |
Singapore University of Technology and Design |
Motion and Path Planning III |
| Navigation with Polytopes and B-Spline Path Planner |
Ngoc Thinh Nguyen, Pranav Tej Gangavarapu, Arne Sahrhage, Georg Schildbach, Floris Ernst |
University of Lübeck |
Motion and Path Planning III |
| Probabilistic Planning with Partially Ordered Preferences Over Temporal Goals |
Hazhar Rahmani, Abhishek Kulkarni, Jie Fu |
University of Florida,University of Florida, Gainesville |
Planning under Uncertainty I |
| A Causal Decoupling Approach to Efficient Planning for Logistics Problems with Stateful Stochastic Demand |
Diptanil Chaudhuri, Dylan Shell |
Texas A&M University |
Planning under Uncertainty I |
| Stochastic Robustness Interval for Motion Planning with Signal Temporal Logic |
Roland Ilyes, Qi Heng Ho, Morteza Lahijanian |
University of Colorado Boulder |
Planning under Uncertainty I |
| Planning with SiMBA: Motion Planning under Uncertainty for Temporal Goals Using Simplified Belief Guides |
Qi Heng Ho, Zachary Sunberg, Morteza Lahijanian |
University of Colorado Boulder,University of Colorado |
Planning under Uncertainty I |
| RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation |
Lakshay Sharma, Michael Everett, Donggun Lee, Xiaoyi Cai, Philip Osteen, Jonathan Patrick How |
Massachusetts Institute of Technology,Northeastern University,UC Berkeley,U.S. Army Research Laboratory |
Planning under Uncertainty I |
| Prioritized Robotic Exploration with Deadlines: A Comparison of Greedy, Orienteering, and Profitable Tour Approaches |
Sayantan Datta, Srinivas Akella |
University of North Carolina at Charlotte |
Planning under Uncertainty I |
| Epistemic Prediction and Planning with Implicit Coordination for Multi-Robot Teams in Communication Restricted Environments |
Lauren Bramblett, Shijie Gao, Nicola Bezzo |
University of Virginia |
Planning under Uncertainty I |
| Uncertainty-Guided Active Reinforcement Learning with Bayesian Neural Networks |
Xinyang Wu, Mohamed El-shamouty, Christof Nitsche, Marco F. Huber |
Fraunhofer IPA,University of Stuttgart |
Planning under Uncertainty I |
| Perturbation-Based Best Arm Identification for Efficient Task Planning with Monte-Carlo Tree Search |
Daejong Jin, Juhan Park, Kyungjae Lee |
Chung-Ang university,Chung-ang University,Chung-Ang University |
Task Planning |
| Contingency-Aware Task Assignment and Scheduling for Human-Robot Teams |
Neel Dhanaraj, Santosh Varadanahalli Narayan, Stefanos Nikolaidis, Satyandra K. Gupta |
University of Southern California,UNIVERSITY OF SOUTHERN CALIFORNIA |
Task Planning |
| Extracting Generalizable Skills from a Single Plan Execution Using Abstraction-Critical State Detection |
Khen Elimelech, Lydia Kavraki, Vardi Moshe |
Rice University |
Task Planning |
| Efficient Planning of Multi-Robot Collective Transport Using Graph Reinforcement Learning with Higher Order Topological Abstraction |
Steve Paul, Wenyuan Li, Brian Smyth, Yuzhou Chen, Yulia Gel, Souma Chowdhury |
University at Buffalo,Temple University,University of Texas at Dallas,University at Buffalo, State University of New York |
Task Planning |
| On the Utility of Buffers in Pick-N-Swap Based Lattice Rearrangement |
Kai Gao, Jingjin Yu |
Rutgers University |
Task Planning |
| On-Demand Multi-Agent Basket Picking for Shopping Stores |
Mattias Tiger, David Bergström, Simon Wijk Stranius, Evelina Holmgren, Daniel De Leng, Fredrik Heintz |
AI and Integrated Computer Systems (AIICS), Linköping University,Linköping University |
Task Planning |
| Multi-Robot Coordination and Cooperation with Task Precedence Relationships |
Walker Gosrich, Siddharth Mayya, Saaketh Narayan, Matthew Malencia, Saurav Agarwal, Vijay Kumar |
University of Pennsylvania,Amazon Robotics |
Task Planning |
| On the Programming Effort Required to Generate Behavior Trees and Finite State Machines for Robotic Applications |
Matteo Iovino, Julian Förster, Pietro Falco, Jen Jen Chung, Roland Siegwart, Claes Christian Smith |
ABB Corporate Research,ETH Zurich,ABB, Corporate Research,The University of Queensland,KTH Royal Institute of Technology |
Task Planning |
| Train What You Know - Precise Pick-And-Place with Transporter Networks |
Gergely Sóti, Xi Huang, Christian Wurll, Björn Hein |
Karlsruhe University of Applied Sciences,Karlsruhe Institute of Technology,University of Applied Sciences Karlsruhe |
Deep Learning in Grasping and Manipulation |
| Asking for Help: Failure Prediction in Behavioral Cloning through Value Approximation |
Cem Gokmen, Mohi Khansari, Daniel Ho |
Stanford University,Google X |
Deep Learning in Grasping and Manipulation |
| Seq2Seq Imitation Learning for Tactile Feedback-Based Manipulation |
Wenyan Yang, Alexandre Angleraud, Roel S. Pieters, Joni Pajarinen, Joni-Kristian Kamarainen |
Tampere university,Tampere University,Aalto University,Tampere University of Technology |
Deep Learning in Grasping and Manipulation |
| SGTM 2.0: Autonomously Untangling Long Cables Using Interactive Perception |
Kaushik Shivakumar, Vainavi Viswanath, Anrui Gu, Yahav Avigal, Justin Kerr, Jeffrey Ichnowski, Richard Cheng, Thomas Kollar, Ken Goldberg |
University of California Berkeley,University of California, Berkeley,UC Berkeley,Carnegie Mellon University,California Institute of Technology,Toyota Research Institute |
Deep Learning in Grasping and Manipulation |
| Online Tool Selection with Learned Grasp Prediction Models |
Rohanimanesh Khashayar, Jacob Metzger, William Richards, Aviv Tamar |
Osaro Inc.,Osaro, Inc,Technion |
Deep Learning in Grasping and Manipulation |
| FOGL: Federated Object Grasping Learning |
Seok-kyu Kang, Changhyun Choi |
Korea Shipbuilding & Offshore Engineering Co. Ltd (KSOE), HD Hyundai Group,University of Minnesota, Twin Cities |
Deep Learning in Grasping and Manipulation |
| Goal-Image Conditioned Dynamic Cable Manipulation through Bayesian Inference and Multi-Objective Black-Box Optimization |
Kuniyuki Takahashi, Tadahiro Taniguchi |
Preferred Networks, Inc.,Ritsumeikan University |
Deep Learning in Grasping and Manipulation |
| Learning Generalizable Pivoting Skills |
Xiang Zhang, Siddarth Jain, Baichuan Huang, Masayoshi Tomizuka, Diego Romeres |
University of California, Berkeley,Mitsubishi Electric Research Laboratories (MERL),Rutgers University,University of California,Mitsubishi Electric research laboratories |
Deep Learning in Grasping and Manipulation |
| Cloth Funnels: Canonicalized-Alignment for Multi-Purpose Garment Manipulation |
Alper Canberk, Cheng Chi, Huy Ha, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song |
Columbia University,Toyota Research Institute |
Deep Learning in Grasping and Manipulation |
| RLAfford: End-To-End Affordance Learning for Robotic Manipulation |
Yiran Geng, Boshi An, Haoran Geng, Yuanpei Chen, Yaodong Yang, Hao Dong |
Peking University,South China University of Technology |
Deep Learning in Grasping and Manipulation |
| Implementation and Optimization of Grasping Learning with Dual-Modal Soft Gripper |
Lei Zhao, Horeal Liu, Feihan Li, X.y. Ding, Yuhao Sun, Fuchun Sun, Jianhua Shan, Qi Ye, Lincheng Li, Bin Fang |
anhui university of technology,Tsinghua University,Anhui University of Technology,Zhejiang University,NetEase Fuxi AI Lab,Tsinghua university |
Deep Learning in Grasping and Manipulation |
| DefGraspNets: Grasp Planning on 3D Fields with Graph Neural Nets |
Isabella Huang, Yashraj Narang, Ruzena Bajcsy, Fabio Ramos, Tucker Hermans, Dieter Fox |
UC Berkeley,NVIDIA,Univ of California, Berkeley,University of Sydney, NVIDIA,University of Utah,University of Washington |
Deep Learning in Grasping and Manipulation |
| Option-Aware Adversarial Inverse Reinforcement Learning for Robotic Control |
Jiayu Chen, Tian Lan, Vaneet Aggarwal |
Purdue University,George Washington University |
Learning for Grasping and Manipulation III |
| Efficiently Learning Small Policies for Locomotion and Manipulation |
Shashank Hegde, Gaurav Sukhatme |
University of Southern California |
Learning for Grasping and Manipulation III |
| Learning Agent-Aware Affordances for Closed-Loop Interaction with Articulated Objects |
Giulio Schiavi, Paula Wulkop, Giuseppe Maria Rizzi, Lionel Ott, Roland Siegwart, Jen Jen Chung |
ETH Zürich,ETH Zurich,The University of Queensland |
Learning for Grasping and Manipulation III |
| SE(3)-DiffusionFields: Learning Smooth Cost Functions for Joint Grasp and Motion Optimization through Diffusion |
Julen Urain, Niklas Funk, Jan Peters, Georgia Chalvatzaki |
TU Darmstadt,Technische Universität Darmstadt,Technische Universität Darmastadt |
Learning for Grasping and Manipulation III |
| Focused Adaptation of Dynamics Models for Deformable Object Manipulation |
Peter Mitrano, Alex Lagrassa, Oliver Kroemer, Dmitry Berenson |
University of Michigan,Carnegie Mellon University |
Learning for Grasping and Manipulation III |
| Dexterous Manipulation from Images: Autonomous Real-World RL Via Substep Guidance |
Kelvin Xu, Zheyuan Hu, Ria Doshi, Aaron Rovinsky, Vikash Kumar, Abhishek Gupta, Sergey Levine |
University of California, Berkeley,Meta AI,University of Washington,UC Berkeley |
Learning for Grasping and Manipulation III |
| Predicting Motion Plans for Articulating Everyday Objects |
Arjun Gupta, Max Shepherd, Saurabh Gupta |
UIUC |
Learning for Grasping and Manipulation III |
| Dexterous Imitation Made Easy: A Learning-Based Framework for Efficient Dexterous Manipulation |
Sridhar Pandian Arunachalam, Sneha Silwal, Ben Evans, Lerrel Pinto |
New York University |
Learning for Grasping and Manipulation III |
| Holo-Dex: Teaching Dexterity with Immersive Mixed Reality |
Sridhar Pandian Arunachalam, Irmak Guzey, Soumith Chintala, Lerrel Pinto |
New York University,Facebook AI Research |
Learning for Grasping and Manipulation III |
| Online Augmentation of Learned Grasp Sequence Policies for More Adaptable and Data-Efficient In-Hand Manipulation |
Ethan K. Gordon, Rana Soltani Zarrin |
University of Washington,Honda Research Institute - USA |
Learning for Grasping and Manipulation III |
| DeXtreme: Transfer of Agile In-Hand Manipulation from Simulation to Reality |
Ankur Handa, Arthur Allshire, Viktor Makoviichuk, Aleksei Petrenko, Ritvik Singh, Jingzhou Liu, Denys Makoviichuk, Karl Van Wyk, Zhurkevich Alexander, Balakumar Sundaralingam, Yashraj Narang, Jean-francois Lafleche, Dieter Fox, Gavriel State |
NVidia,University of Toronto,NVIDIA,USC,University of Toronto, NVIDIA,Snap,NVIDIA Corporation,University of Washington |
Learning for Grasping and Manipulation III |
| Meta-Reinforcement Learning Via Language Instructions |
Zhenshan Bing, Alexander Koch, Xiangtong Yao, Kai Huang, Alois Knoll |
Technical University of Munich,Sun Yat-sen University,Tech. Univ. Muenchen TUM |
Learning for Grasping and Manipulation III |
| Improving Video Super-Resolution with Long-Term Self-Exemplars |
Guotao Meng, Yue Wu, Qifeng Chen |
HKUST,Hong Kong University of Science and Technology |
Machine Learning for Perception |
| Learning-Based Relational Object Matching across Views |
Cathrin Elich, Iro Armeni, Martin R. Oswald, Marc Pollefeys, Joerg Stueckler |
Max Planck Institute for Intelligent Systems,ETH Zurich |
Machine Learning for Perception |
| TransVisDrone: Spatio-Temporal Transformer for Vision-Based Drone-To-Drone Detection in Aerial Videos |
Tushar Bharat Sangam, Ishan Rajendrakumar Dave, Waqas Sultani, Mubarak Shah |
University of Central Florida,Informational Technology University |
Machine Learning for Perception |
| Unsupervised RGB-To-Thermal Domain Adaptation Via Multi-Domain Attention Network |
Lu Gan, Connor Lee, Soon-Jo Chung |
California Institute of Technology,Caltech |
Machine Learning for Perception |
| Adaptive-SpikeNet: Event-Based Optical Flow Estimation Using Spiking Neural Networks with Learnable Neuronal Dynamics |
Adarsh Kosta, Kaushik Roy |
Purdue University |
Machine Learning for Perception |
| Reinforced Learning for Label-Efficient 3D Face Reconstruction |
Hoda Mohaghegh, Hossein Rahmani, Hamid Laga, Farid Boussaid, Mohammed Bennamoun |
University of Western Australia,Lancaster University,Murdoch University,The University of Western Australia,UWA |
Machine Learning for Perception |
| Bridging the Domain Gap for Multi-Agent Perception |
Runsheng Xu, Jinlong Li, Xiaoyu Dong, Hongkai Yu, Jiaqi Ma |
UCLA,cleveland state university,Northwestern University,Cleveland State University,University of California, Los Angeles |
Machine Learning for Perception |
| UPLIFT: Unsupervised Person Labeling and Identification Via Cooperative Learning with Mobile Robots |
Yu-chee Tseng, Ting-Yuan Ke, Fang-jing Wu |
National Yang Ming Chiao Tung University,TU Dortmund University |
Machine Learning for Perception |
| Learning to Explore Informative Trajectories and Samples for Embodied Perception |
Ya Jing, Tao Kong |
ByteDance |
Machine Learning for Perception |
| Embodied Agents for Efficient Exploration and Smart Scene Description |
Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara |
University of Modena and Reggio Emilia,Università degli Studi di Modena e Reggio Emilia |
Machine Learning for Perception |
| Deep Neural Network Architecture Search for Accurate Visual Pose Estimation Aboard Nano-UAVs |
Elia Cereda, Luca Crupi, Matteo Risso, Alessio Burrello, Luca Benini, Alessandro Giusti, Daniele Jahier Pagliari, Daniele Palossi |
IDSIA USI-SUPSI,Politecnico di Torino,Università di Bologna,University of Bologna,IDSIA Lugano, SUPSI,ETH Zurich |
Machine Learning for Perception |
| Reuse Your Features: Unifying Retrieval and Feature-Metric Alignment |
Javier Morlana, Jose M M Montiel |
Universidad de Zaragoza,I,A. Universidad de Zaragoza |
Machine Learning for Perception |
| FreDSNet: Joint Monocular Depth and Semantic Segmentation with Fast Fourier Convolutions from Single Panoramas |
Bruno Berenguel-Baeta, Jesús Bermúdez, Josechu Guerrero |
University of Zaragoza,Universidad de Zaragoza |
Deep Learning for Visual Perception I |
| CAHIR: Co-Attentive Hierarchical Image Representations for Visual Place Recognition |
Guohao Peng, Heshan Li, Yifeng Huang, Jun Zhang, Mingxing Wen, Singh Rahul, Danwei Wang |
Nanyang Technological University,Continental Automotive Singapore Pte Ltd |
Deep Learning for Visual Perception I |
| Monocular Visual-Inertial Depth Estimation |
Diana Wofk, Rene Ranftl, Matthias Mueller, Vladlen Koltun |
Intel,Intel Labs |
Deep Learning for Visual Perception I |
| KGNet: Knowledge-Guided Networks for Category-Level 6D Object Pose and Size Estimation |
Qiwei Meng, Jianjun Gu, Shiqiang Zhu, Jianfeng Liao, Tianlei Jin, Fangtai Guo, Wen Wang, Wei Song |
Zhejiang Lab |
Deep Learning for Visual Perception I |
| Online Consistent Video Depth with Gaussian Mixture Representation |
Chao Liu, Benjamin Eckart, Jan Kautz |
NVIDIA |
Deep Learning for Visual Perception I |
| Deep Masked Graph Matching for Correspondence Identification in Collaborative Perception |
Peng Gao, Qingzhao Zhu, Hongsheng Lu, Chuang Gan, Hao Zhang |
University of Maryland, College Park,Colorado School of Mines,Toyota Motor North America,IBM |
Deep Learning for Visual Perception I |
| Operative Action Captioning for Estimating System Actions |
Taiki Nakamura, Seiya Kawano, Akishige Yuguchi, Yasutomo Kawanishi, Koichiro Yoshino |
The University of Tokyo,RIKEN,Institute of Physical and Chemical Research (RIKEN) |
Deep Learning for Visual Perception I |
| Deep Unsupervised Visual Odometry Via Bundle Adjusted Pose Graph Optimization |
Guoyu Lu |
University of Georgia |
Deep Learning for Visual Perception I |
| Pose Relation Transformer : Refine Occlusions for Human Pose Estimation |
Hyung-gun Chi, Seunggeun Chi, Stanley Chan, Karthik Ramani |
Purdue University,Purdue |
Deep Learning for Visual Perception I |
| Question Generation for Uncertainty Elimination of Referring Expression in 3D Environment |
Fumiya Matsuzawa, Yue Qiu, Kenji Iwata, Hirokatsu Kataoka, Yutaka Satoh |
National Institute of Advanced Industrial Science and Technology,AIST |
Deep Learning for Visual Perception I |
| A New Efficient Eye Gaze Tracker for Robotic Applications |
Chaitanya Bandi, Ulrike Thomas |
Chemnitz University of Technology |
Deep Learning for Visual Perception I |
| A Deep Learning Human Activity Recognition Framework for Socially Assistive Robots to Support Reablement of Older Adults |
Fraser Robinson, Goldie Nejat |
University of Toronto |
Deep Learning for Visual Perception I |
| FloorplanNet: Learning Topometric Floorplan Matching for Robot Localization |
Delin Feng, Zhenpeng He, Jiawei Hou, Soeren Schwertfeger, Liangjun Zhang |
ShanghaiTech University,Baidu |
Localization and Mapping III |
| MOFT: Monocular Odometry Based on Deep Depth and Careful Feature Selection and Tracking |
Karlo Koledic, Igor Cvišsić, Ivan Markovic, Ivan Petrovic |
University of Zagreb,University of Zagreb, Faculty of Electrical Engineering and Comp,University of Zagreb Faculty of Electrical Engineering and Computing |
Localization and Mapping III |
| LGCNet: Feature Enhancement and Consistency Learning Based on Local and Global Coherence Network for Correspondence Selection |
Tzu-Han Wu, Kuan-Wen Chen |
National Yang Ming Chiao Tung University |
Localization and Mapping III |
| Learning-Based Dimensionality Reduction for Computing Compact and Effective Local Feature Descriptors |
Hao Dong, Xieyuanli Chen, Mihai Dusmanu, Viktor Larsson, Marc Pollefeys, Cyrill Stachniss |
ETH Zürich,National University of Defense Technology,ETH Zurich,Lund University,University of Bonn |
Localization and Mapping III |
| Online Visual SLAM Adaptation against Catastrophic Forgetting with Cycle-Consistent Contrastive Learning |
Sangni Xu, Hao Xiong, Qiuxia Wu, Tingting Yao, Zhihui Wang, Zhiyong Wang |
South China University of Technology,Macquarie University,Dalian Maritime University,Dalian University of Technology,The University of Sydney |
Localization and Mapping III |
| SLAMER: Simultaneous Localization and Map-Assisted Environment Recognition |
Naoki Akai |
Nagoya University |
Localization and Mapping III |
| Descriptor Distillation for Efficient Multi-Robot SLAM |
Xiyue Guo, Junjie Hu, Hujun Bao, Guofeng Zhang |
Zhejiang University,The Chinese University of Hong Kong, Shenzhen |
Localization and Mapping III |
| DS-K3DOM: 3-D Dynamic Occupancy Mapping with Kernel Inference and Dempster-Shafer Evidential Theory |
Juyeop Han, Youngjae Min, Hyeok-Joo Chae, Byeongmin Jeong, Han-Lim Choi |
Korea Advanced Institute of Science and Technology,Massachusetts Institute of Technology,KAIST |
Localization and Mapping III |
| Monocular Visual-Inertial Odometry with Planar Regularities |
Chuchu Chen, Patrick Geneva, Yuxiang Peng, Woosik Lee, Guoquan Huang |
University of Delaware |
Localization and Mapping III |
| BAMF-SLAM: Bundle Adjusted Multi-Fisheye Visual-Inertial SLAM Using Recurrent Field Transforms |
Wei Zhang, Sen Wang, Xingliang Dong, Rongwei Guo, Norbert Haala |
University of Stuttgart,Techinische Universität München,Huawei Technologies, Co., Ltd., P. R. CHINA,Huawei,University of Stuttgart, Institute for Photogrammetry |
Localization and Mapping III |
| Improving the Performance of Local Bundle Adjustment for Visual-Inertial SLAM with Efficient Use of GPU Resources |
Shishir Gopinath, Karthik Dantu, Steve Ko |
Simon Fraser University,University of Buffalo |
Localization and Mapping III |
| Distributed Initialization for Visual-Inertial-Ranging Odometry with Position-Unknown UWB Network |
Shenhan Jia, Rong Xiong, Yue Wang |
Zhejiang University |
Localization and Mapping III |
| Biomimetic Electric Sense Based Localization: A Solution for Small Underwater Robots in Large-Scale Environment |
Junzheng Zheng, Jingxian Wang, Xin Guo, Chayutpon Huntrakul, Chen Wang, Guangming Xie |
Peking University,Northwestern University |
Localisation 2 |
| How Many Events Do You Need? Event-Based Visual Place Recognition Using Sparse but Varying Pixels |
Tobias Fischer, Michael J Milford |
Queensland University of Technology |
Localisation 2 |
| Mitigating Shadows in LIDAR Scan Matching Using Spherical Voxels |
Matthew Mcdermott, Jason Rife |
Tufts University |
Localisation 2 |
| UWB-VIO Fusion for Accurate and Robust Relative Localization of Ground Robotic Teams |
Shuaikang Zheng, Zhitian Li, Yunfei Liu, Haifeng Zhang, Pengcheng Zheng, Xingdong Liang, Yanlei Li, Xiangxi Bu, Xudong Zou |
University of Chinese Academy of Sciences,Aerospace Information Research Institute, Chinese Academy of Sci,National Key Laboratory of Microwave Imaging Technology, Aerospa |
Localisation 2 |
| Robust Self-Tuning Data Association for Geo-Referencing Using Lane Markings |
Miguel Ángel Muñoz-Bañón, Jan-Hendrik Pauls, Haohao Hu, Christoph Stiller, Francisco A. Candelas, Fernando Torres |
University of Alicante,Karlsruhe Institute of Technology (KIT),Karlsruhe Institute of Technology,University of Alicante VAT ES-Q-,-G |
Localisation 2 |
| Fast and Versatile Feature-Based LiDAR Odometry Via Efficient Local Quadratic Surface Approximation |
Seungwon Choi, Hee-Won Chae, Yunsuk Jeung, Seokjoon Kim, Kyusung Cho, Taewan Kim |
Seoul National University,Korea University,MAXST |
Localisation 2 |
| KPPR: Exploiting Momentum Contrast for Point Cloud-Based Place Recognition |
Louis Wiesmann, Lucas Nunes, Jens Behley, Cyrill Stachniss |
University of Bonn |
Localisation 2 |
| Handling Constrained Optimization in Factor Graphs for Autonomous Navigation |
Barbara Bazzana, Tiziano Guadagnino, Giorgio Grisetti |
Sapienza Univ. of Rome,Sapienza University of Rome |
Localisation 2 |
| Long-Term Localization Using Semantic Cues in Floor Plan Maps |
Nicky Zimmerman, Tiziano Guadagnino, Xieyuanli Chen, Jens Behley, Cyrill Stachniss |
University of Bonn,Sapienza University of Rome,National University of Defense Technology |
Localisation 2 |
| COBRA: From Industrial to Medical Surgery with Slender Continuum Robots |
David Alatorre Troncoso, Jose A. Robles-linares, Matteo Russo, Mohamed A. Elbanna, Samuel Wild, Xin Dong, Abdelkhalick Mohammad, James Kell, Andy Norton, Dragos Axinte |
University of Nottingham,University of Rome Tor Vergata,Rolls-Royce Plc |
Medical Systems |
| Assistive Robotic Technologies for Next-Generation Smart Wheelchairs |
Fabio Morbidi, Louise Devigne, Catalin Stefan Teodorescu, Bastien Fraudet, Emilie Leblong, Tom Carlson, Marie Babel, Guillaume Caron, Sarah Delmas, François Pasteau, Guillaume Vailland, Valérie Gouranton, Sylvain Guegan, Ronan Le Breton, Nicolas Ragot |
Université de Picardie Jules Verne,IRISA UMR CNRS , - INRIA - INSA Rennes - Rehabilitation Cente,The University of Manchester,Rehabilitation Center Pôle Saint Hélier,Rehabilitation Center Pôle Saint Hélier Rennes,University College London, UK,IRISA UMR CNRS , - INRIA - INSA Rennes,CNRS,Universite de Picardie Jules Verne,INSA Rennes / IRISA Rainbow Team,IRISA UMR CNRS , - Inria - INSA Rennes,INSA Rennes,UNIV-RENNES - INSA Rennes,CESI |
Medical Systems |
| A-SEE: Active-Sensing End-Effector Enabled Probe Self-Normal-Positioning for Robotic Ultrasound Imaging Applications |
Xihan Ma, Wen-yi Kuo, Kehan Yang, Ashiqur Rahaman, Haichong Zhang |
Worcester Polytechnic Institute |
Medical Systems |
| Hybrid Half-Gaussian Selectively Adaptive Fuzzy Control of an Actuated Ankle Foot-Orthosis |
Huiseok Moon, Roshni Maiti, Kaushik Das Sharma, Yacine Amirat, Patrick Siarry, Samer Mohammed |
LISSI-lab, Universite de Paris-Est Creteil (UPEC),University of Calcutta,University of Paris Est Créteil (UPEC),Université Paris-Est Créteil,University of Paris Est Créteil - (UPEC) |
Medical Systems |
| Collaborative Magnetic Manipulation Via Two Robotically-Actuated Permanent Magnets |
Giovanni Pittiglio, Michael Brockdorff, Tomas Veiga, Josh Davy, James Henry Chandler, Pietro Valdastri |
Harvard University,University of Leeds |
Medical Systems |
| Neuromechanical Model-Based Adaptive Control of Bi-Lateral Ankle Exoskeletons: Biological Joint Torque and Electromyogram Reduction across Walking Conditions |
Guillaume Durandau, Wolfgang Rampeltshammer, Herman Van Der Kooij, Massimo Sartori |
McGill University,University Twente,Universtity of Twente,University of Twente |
Medical Systems |
| A Markov Chain Model for Workflow Analysis in Operating Rooms |
Hanyi Zheng, Qing Wang, Jingshan Li |
Tsinghua University |
Medical Systems |
| On the Workspace of Electromagnetic Navigation Systems |
Quentin Boehler, Simone Gervasoni, Samuel L. Charreyron, Christophe Chautems, Bradley Nelson |
ETH Zurich,Accelera AI |
Medical Systems |
| UVtac: Switchable UV Marker-Based Tactile Sensing Finger for Effective Force Estimation and Object Localization |
Woojong Kim, Won Dong Kim, Jeong-Jung Kim, Chang-Hyun Kim, Jung Kim |
KAIST,Korea Advanced Institute of Science & Technology (KAIST),Korea Institute of Machinery & Materials (KIMM),Korea Institute of Machinery and Materials (KIMM) |
Manipulation and Grasping II |
| Sparse-Dense Motion Modelling and Tracking for Manipulation without Prior Object Models |
Christian Rauch, Ran Long, Vladimir Ivan, Sethu Vijayakumar |
Robert Bosch GmbH,University of Edinburgh,Touchlab Limited |
Manipulation and Grasping II |
| Enhanced GPIS Learning Based on Local and Global Focus Areas |
Zuka Murvanidze, Marc Peter Deisenroth, Yasemin Bekiroglu |
University College London,Chalmers University of Technology, University College London |
Manipulation and Grasping II |
| Ambiguity-Aware Multi-Object Pose Optimization for Visually-Assisted Robot Manipulation |
Myung-Hwan Jeon, Jeongyun Kim, Jee-Hwan Ryu, Ayoung Kim |
Seoul National University,SNU,Korea Advanced Institute of Science and Technology |
Manipulation and Grasping II |
| Interaction Control of a Robotic Manipulator with the Surface of Deformable Object |
Athanasios Dometios, Costas S. Tzafestas |
National Technical University of Athens (NTUA),ICCS - Inst of Communication and Computer Systems |
Manipulation and Grasping II |
| DiffSRL: Learning Dynamical State Representation for Deformable Object Manipulation with Differentiable Simulation |
Sirui Chen, Yunhao Liu, Shang Wen Yao, Jialong Li, Tingxiang Fan, Jia Pan |
The University of Hong Kong,University of Hong Kong,The Univeristy of Hong Kong |
Manipulation and Grasping II |
| SymmetryGrasp: Symmetry-Aware Antipodal Grasp Detection from Single-View RGB-D Images |
Yifei Shi, Zixin Tang, Xiangting Cai, Hongjia Zhang, Dewen Hu, Xin Xu |
National University of Defense Technology |
Manipulation and Grasping II |
| Hardware-Accelerated Mars Sample Localization Via Deep Transfer Learning from Photorealistic Simulations |
Raul Castilla-Arquillo, Carlos Perez-del-pulgar, Gonzalo Jesús Paz Delgado, Levin Gerdes |
University of Málaga,Universidad de Málaga,ESA/ESTEC |
Manipulation and Grasping II |
| How AI and Robotics Can Build Furniture: A Case Study from the 2021 AI-Robot Assembly Challenge |
Seongseop Yun, Myoung-su Choi, Min-young Cho, Keunhwan Kim, Dong-Hyuk Lee, Sewoong Jun, Ji-Hun Bae, Dongjun Shin |
Yonsei University,KITECH, UST,KOREA ELECTRONICS TECHNOLOGY INSTITUTE,Korea Electronics Technology Institute,Korea Institute of Industrial Technology (KITECH),Korea Institute of Industrial Technology |
Manipulation and Grasping II |
| A Robotic End-Effector for Screwing and Unscrewing Bolts from the Side |
Rui Tao, Junfeng Fan, Fengshui Jing, Jun Hou, Shiyu Xing, Yunkai Ma, Min Tan |
Institute of Automation, Chinese Academy of Sciences,Institute of Automation,CAS,Chinese Academy of Sciences, Institute of Automation,Chinese Academy of Sciences,Institute of Automation, Chinese Academy of Sciences,Institute of Automation,Chinese Academy of Sciences |
Manipulation and Grasping II |
| Adaptive Cooperative Control for Human-Robot Load Manipulation |
Carlos de Cos, Dimos V. Dimarogonas |
MathWorks AB,KTH Royal Institute of Technology |
Human-Robot Interaction/Collaboration |
| An Energy Based Control Architecture for Shared Autonomy |
Federico Benzi, Federica Ferraguti, Giuseppe Riggio, Cristian Secchi |
University of Modena and Reggio Emilia,Università degli Studi di Modena e Reggio Emilia |
Human-Robot Interaction/Collaboration |
| Computational Model of Robot Trust in Human Co-Worker for Physical Human-Robot Collaboration |
Qiao Wang, Dikai Liu, Marc Garry Carmichael, Stefano Aldini, Chin-teng Lin |
University of Technology Sydney,Centre for Autonomous Systems,UTS |
Human-Robot Interaction/Collaboration |
| Robust Multi-User In-Hand Object Recognition in Human-Robot Collaboration Using a Wearable Force-Myography Device |
Eran Bamani, Nadav Dov Kahanowich, Inbar Meir, Avishai Sintov |
Tel Aviv University,Tel-Aviv University |
Human-Robot Interaction/Collaboration |
| CARE: Cooperation of AI-Robot Enablers to Create a Vibrant Society |
Ankit Ravankar, Amir Tafrishi, Jose Victorio Salazar Luces, Fumi Seto, Yasuhisa Hirata |
Tohoku University,Cardiff University |
Human-Robot Interaction/Collaboration |
| Safety and Efficiency in Robotics: The Control Barrier Functions Approach |
Federica Ferraguti, Chiara Talignani Landi, Andrew Singletary, Hsien-Chung Lin, Aaron Ames, Cristian Secchi, Marcello Bonfe |
Università degli Studi di Modena e Reggio Emilia,University of Modena and Reggio Emilia,California Institute of Technology,FANUC Corporation,Caltech,University of Ferrara |
Human-Robot Interaction/Collaboration |
| Encouraging Human Interaction with Robot Teams: Legible and Fair Subtask Allocations |
Soheil Habibian, Dylan Losey |
Virginia Tech |
Human-Robot Interaction/Collaboration |
| Autonomous Wristband Placement in a Moving Hand for Victims in SAR Scenarios with a Mobile Manipulator |
Francisco Pastor, Francisco Jesús Ruiz Ruiz, Jesus Manuel Gomez De Gabriel, Alfonso García-Cerezo |
Universidad de Málaga,University of Málaga,Universidad de Malaga,University of Malaga |
Human-Robot Interaction/Collaboration |
| Recommending Fine-Grained Tool Consistent with Common Sense Knowledge for Robot |
Jianjia Xin, Lichun Wang, Shaofan Wang, Yukun Liu, Chao Yang, Baocai Yin |
Beijing University of technology |
Computer Vision and Visual Servoing |
| Real-Time Hetero-Stereo Matching for Event and Frame Camera with Aligned Events Using Maximum Shift Distance |
Haram Kim, Sangil Lee, Junha Kim, H. Jin Kim |
Seoul National University,Seoul National Univ. |
Computer Vision and Visual Servoing |
| Toward Holistic Scene Understanding: A Transfer of Human Scene Perception to Mobile Robots |
Florenz Graf, Jochen Lindermayr, Cagatay Odabasi, Marco F. Huber |
Fraunhofer IPA,University of Stuttgart |
Computer Vision and Visual Servoing |
| Object Detection Using Sim2Real Domain Randomization for Robotic Applications |
Dániel Horváth, Gábor Erdos, Zoltán Istenes, Tomas Horvath, Sándor Földi |
Institute for Computer Science and Control (SZTAKI) and Eötvös L,Institute for Computer Science and Control, Engineering and Mana,Eötvös Loránd University, Faculty of Informatics,Eötvös Loránd University,Centre of Excellence in Production Informatics and Control, Inst |
Computer Vision and Visual Servoing |
| Continual Adaptation of Semantic Segmentation Using Complementary 2D-3D Data Representations |
Jonas Frey, Hermann Blum, Francesco Milano, Roland Siegwart, Cesar D. Cadena Lerma |
ETH Zurich |
Computer Vision and Visual Servoing |
| ROFT: Real-Time Optical Flow-Aided 6D Object Pose and Velocity Tracking |
Nicola Agostino Piga, Yuriy Onyshchuk, Giulia Pasquale, Ugo Pattacini, Lorenzo Natale |
Istituto Italiano di Tecnologia,Italian Institute of Technology (IIT) |
Computer Vision and Visual Servoing |
| Stability and Convergence Analysis of 3D Feature-Based Visual Servoing |
Marco Costanzo, Giuseppe De Maria, Ciro Natale, Antonio Russo |
“Università degli Studi della Campania ““Luigi Vanvitelli””,Università degli Studi della Campania Luigi Vanvitelli” |
Computer Vision and Visual Servoing |
| A Robust Visual Servoing Controller for Anthropomorphic Manipulators with Field-Of-View Constraints and Swivel-Angle Motion |
Jiao Jiang, Yaonan Wang, Yiming Jiang, He Xie, Haoran Tan, Hui Zhang |
Hunan University,Huazhong University of Science and Technology |
Computer Vision and Visual Servoing |
| Formation Tracking and Obstacle Avoidance for Multiple Quadrotors with Static and Dynamic Obstacles |
Juntong Qi, Jinjin Guo, Mingming Wang, Chong Wu, Zhenwei Ma |
Shanghai University,Tianjin University,EFY Intelligent Control (Tianjin) Technology Co., Ltd |
Aerial Robotics |
| Deep Learning-Aided Synthetic Airspeed Estimation of UAVs for Analytical Redundancy with a Temporal Convolutional Network |
Hyungtae Lim, Han-seok Ryu, Matthew Rhudy, Dongjin Lee, Dongjin Jang, Changho Lee, Youngmin Park, Wonkeun Youn, Hyun Myung |
Korea Advanced Institute of Science and Technology,Korea Aerospace Research Institute,Penn State University,Hanseo University,Chungnam National University,KAIST (Korea Advanced Institute of Science and Technology) |
Aerial Robotics |
| Reconfigurable Drone System for Transportation of Parcels with Variable Mass and Size |
Fabrizio Schiano, Przemyslaw Mariusz Kornatowski, Leonardo Cencetti, Dario Floreano |
Leonardo S.p.a.,Ecole Polytechnique Federale de Lausanne (EPFL),Swiss Federal Institute of Technology Lausanne (EPFL),Ecole Polytechnique Federal, Lausanne |
Aerial Robotics |
| Geometrically Constrained Trajectory Optimization for Multicopters |
Zhepei Wang, Xin Zhou, Chao Xu, Fei Gao |
Zhejiang University,ZHEJIANG UNIVERSITY |
Aerial Robotics |
| Parameter Estimation and Control of Multirotors |
Cheng-cheng Yang, Teng-Hu Cheng |
National Chiao Tung University,National Yang Ming Chiao Tung University |
Aerial Robotics |
| Indirect Force Control of a Cable-Suspended Aerial Multi-Robot Manipulator |
Dario Sanalitro, Marco Tognon, Antonio Jimenez-cano, Juan Cortes, Antonio Franchi |
University of Catania,Inria Rennes-Bretagne Atlantique,Centre National de la Recherche Scientifique,LAAS-CNRS,University of Twente |
Aerial Robotics |
| Accurate High-Maneuvering Trajectory Tracking for Quadrotors: A Drag Utilization Method |
Jindou Jia, Kexin Guo, Xiang Yu, Weihua Zhao, Lei Guo |
Beihang University,NanyangTechnologicalUniversity |
Aerial Robotics |
| A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight |
Sihao Sun, Angel Romero, Philipp Foehn, Elia Kaufmann, Davide Scaramuzza |
Univesity of Twente,University of Zurich |
Aerial Robotics |
| Model Predictive Contouring Control for Time-Optimal Quadrotor Flight |
Angel Romero, Sihao Sun, Philipp Foehn, Davide Scaramuzza |
University of Zurich,Univesity of Twente |
Aerial Robotics |
| Automating Vascular Shunt Insertion with the dVRK Surgical Robot |
Karthik Dharmarajan, William Panitch, Muyan Jiang, Kishore Srinivas, Baiyu Shi, Yahav Avigal, Huang Huang, Thomas Low, Danyal Fer, Ken Goldberg |
UC Berkeley,University of California, Berkeley,University of California at Berkeley,SRI International,University of California, San Francisco East Bay |
Medical Robotics II |
| CogniDaVinci: Towards Estimating Mental Workload Modulated by Visual Delays During Telerobotic Surgery – an EEG-Based Analysis |
Satyam Kumar, Deland Hu Liu, Frigyes Samuel Racz, Manuel Retana, Susheela Sharma, Fumiaki Iwane, Braden Murphy, Rory O’keeffe, S. Farokh Atashzar, Farshid Alambeigi, Jose del R. Millan |
The University of Texas at Austin,University of Texas at Austin,UNIVERSITY OF TEXAS, AUSTIN,National Institutes of Health,New York University,New York University (NYU), US |
Medical Robotics II |
| Exploring an External Approach to Subretinal Drug Delivery Via Robot Assistance and B-Mode OCT |
Elan Ahronovich, Neel Shihora, Jin-Hui Shen, Karen Joos, Nabil Simaan |
Vanderbilt ARMA,Vanderbilt University |
Medical Robotics II |
| Towards Surgical Context Inference and Translation to Gestures |
Kay Hutchinson, Zongyu Li, Ian Reyes, Homa Alemzadeh |
University of Virginia,The University of Virginia,IBM |
Medical Robotics II |
| A Method to Use Haptic Feedback of Laryngoscope Force Vector for Endotracheal Intubation Training |
Haonan Zhou, Siyu Yang, Louis Halamek, Thrishantha Nanayakkara |
Imperial College London,Stanford University |
Medical Robotics II |
| A Hydraulic Soft Robotic Detrusor Based on an Origami Design |
Simone Onorati, Federica Semproni, Linda Paterno, Giada Casagrande, Veronica Iacovacci, Arianna Menciassi |
The BioRobotics Institute - Scuola Superiore S. Anna,Scuola Superiore Sant’Anna,Scuola Superiore Sant’Anna - SSSA |
Medical Robotics II |
| Semi-Autonomous Robotic Control of a Self-Shaping Cochlear Implant |
Daniel Bautista-Salinas, Conor Kirby, Mohamed Essam Mohamed Kassem Abdel, Burak Temelkuran, Charlie T Huins, Ferdinando Rodriguez Y Baena |
Imperial College London,Queen Elizabeth Hospital Birmingham,Imperial College, London, UK |
Medical Robotics II |
| A Hybrid Steerable Robot with Magnetic Wrist for Minimally Invasive Epilepsy Surgery |
Changyan He, Robert Hideki Nguyen, Cameron Forbrigger, James Drake, Thomas Looi, Eric Diller |
University of Toronto,The Hospital for Sick Children,Hospital for Sick Children, University of Toronto,Hospital for Sick Children |
Medical Robotics II |
| Induced Vertex Motion As a Performance Measure for Surgery in Confined Spaces |
Neel Shihora, Nabil Simaan |
Vanderbilt University |
Surgical Robotics |
| Foot Gestures to Control the Grasping of a Surgical Robot |
Yijun Cheng, Yanpei Huang, Ziwei Wang, Etienne Burdet |
Imperial College London,Lancaster University,imperial college london |
Surgical Robotics |
| Design and Development of a Novel Force-Sensing Robotic System for the Transseptal Puncture in Left Atrial Catheter Ablation |
Aya Mutaz Zeidan, Zhouyang Xu, Christopher Edwin Mower, Honglei Wu, Quentin Walker, Oyinkansola Ayoade, Natalia Cotic, Jonathan Behar, Steven Williams, Aruna Arujuna, Yohan Noh, Richard James Housden, Kawal Rhode |
King’s College London,King’s College London,Brunel University London |
Surgical Robotics |
| Surgical-VQLA: Transformer with Gated Vision-Language Embedding for Visual Question Localized-Answering in Robotic Surgery |
Long Bai, Mobarakol Islam, Lalithkumar Seenivasan, Hongliang Ren |
The Chinese University of Hong Kong,University College London,National University of Singapore,Chinese Univ Hong Kong (CUHK) & National Univ Singapore(NUS) |
Surgical Robotics |
| Implicit Neural Field Guidance for Teleoperated Robot‐assisted Surgery |
Heng Zhang, Lifeng Zhu, Jiangwei Shen, Song Aiguo |
Southeast University |
Navigation |
| Bidirectional Generalised Rigid Point Set Registration |
Ang Zhang, Zhe Min, Li Liu, Max Qing Hu Meng |
The Chinese University of Hong Kong,University College London |
Navigation |
| Finding the Optimal Incision Point in Robotic Assisted Surgery |
Kyriakos Almpanidis, Theodora Kastritsi, Zoe Doulgeri |
Aristotle University of Thessaloniki |
Navigation |
| Development and Experimental Verification of a 3D Dynamic Absolute Nodal Coordinate Formulation Model of Flexible Prostate Biopsy/Brachytherapy Needles |
Athanasios Martsopoulos, Thomas Hill, Raj Persad, Stefanos Bolomytis, Antonia Tzemanaki |
University of Bristol,Bristol Urological Institute, Southmead Hospital, Bristol,North Bristol NHS Trust |
Navigation |
| Collaborative Robotic Biopsy with Trajectory Guidance and Needle Tip Force Feedback |
Robin Mieling, Maximilian Neidhardt, Sarah Latus, Carolin Stapper, Stefan Gerlach, Inga Kniep, Axel Heinemann, Benjamin Ondruschka, Alexander Schlaefer |
Hamburg University of Technology,University Medical Center Hamburg-Eppendorf |
Navigation |
| Development and Evaluation of a Robotic Vessel Positioning System for Semi-Automatic Microvascular Anastomosis |
Jesse Haworth, Justin Opfermann, Michael Kam, Yaning Wang, Robin Yang, Jin Kang, Axel Krieger |
Johns Hopkins University,Johns Hopkins Medicine,the Johns Hopkins University |
Navigation |
| Robotic Sonographer: Autonomous Robotic Ultrasound Using Domain Expertise in Bayesian Optimization |
Deepak Raina, Sh Chandrashekhara, Richard Voyles, Juan Wachs, Subir Kumar Saha |
Indian Institute of Technology Delhi and Purdue University USA,All India Insititute of Medical Sciences, New Delhi,Purdue University,Indain Institute of Technology Delhi |
Navigation |
| Autonomous Intelligent Navigation for Flexible Endoscopy Using Monocular Depth Guidance and 3-D Shape Planning |
Yiang Lu, Ruofeng Wei, Bin Li, Wei Chen, Jianshu Zhou, Qi Dou, Dong Sun, Yunhui Liu |
The Chinese University of Hong Kong,City University of Hong Kong,Chinese University of Hong Kong |
Navigation |
| A Probabilistic Rotation Representation for Symmetric Shapes with an Efficiently Computable Bingham Loss Function |
Hiroya Sato, Takuya Ikeda, Koichi Nishiwaki |
The University of Tokyo,Woven Planet Holdings, Inc.,Woven Alpha |
Probability and Statistical Methods |
| Topological Trajectory Prediction with Homotopy Classes |
Jennifer Wakulicz, Ki Myung Brian Lee, Teresa A. Vidal-Calleja, Robert Fitch |
University of Technology Sydney, Centre for Autonomous Systems,University of Technology Sydney |
Probability and Statistical Methods |
| Information-Theoretic Abstraction of Semantic Octree Models for Integrated Perception and Planning |
Daniel Larsson, Arash Asgharivaskasi, Jaein Lim, Nikolay A. Atanasov, Panagiotis Tsiotras |
Georgia Institute of Technology,University of California, San Diego,Georgia Tech |
Probability and Statistical Methods |
| BO-ICP: Initialization of Iterative Closest Point Based on Bayesian Optimization |
Harel Biggie, Andrew Beathard, Christoffer Heckman |
University of Colorado Boulder,University of Colorado, Boulder,University of Colorado at Boulder |
Probability and Statistical Methods |
| DuEqNet: Dual-Equivariance Network in Outdoor 3D Object Detection for Autonomous Driving |
Xihao Wang, Jiaming Lei, Hai Lan, Arafat Al-Jawari, Xian Wei |
Technical University of Munich,Fujian Institute of Research on the Structure of Matter,East China Normal University |
Object Detection II |
| NVRadarNet: Real-Time Radar Obstacle and Free Space Detection for Autonomous Driving |
Alexander Popov, Patrik Gebhardt, Ke Chen, Ryan Oldja, Hee Seok Lee, Shane Murray, Ruchi Bhargava, Nikolai Smolyanskiy |
NVIDIA,NVIDIA Corporation,Nvidia,nvidia |
Object Detection II |
| TransRSS: Transformer-Based Radar Semantic Segmentation |
Hao Zou, Harry Xie, Jiarong Ou, Gao Yutao |
Alibaba group,Alibaba Group,Alibaba |
Object Detection II |
| Source-Free Unsupervised Domain Adaptation for 3D Object Detection in Adverse Weather |
Deepti Hegde, Velat Kilic, Vishwanath Sindagi, A. Brinton Cooper, Mark Foster, Vishal M. Patel |
Johns Hopkins University,The Johns Hopkins UNiversity |
Object Detection II |
| Bayesian Deep Learning for Affordance Segmentation in Images |
Lorenzo Mur Labadia, Ruben Martinez-Cantin, Josechu Guerrero |
University of Zaragoza,Universidad de Zaragoza |
Object Detection II |
| Multi-View Keypoints for Reliable 6D Object Pose Estimation |
Alan Li, Angela P. Schoellig |
University of Toronto,TU Munich |
Object Detection II |
| Towards Unsupervised Filtering of Millimetre-Wave Radar Returns for Autonomous Vehicle Road Following |
Dean Sacoransky, Joshua Marshall, Keyvan Hashtrudi-zaad |
Queen’s University |
Object Detection II |
| Domain Generalised Fully Convolutional One Stage Detection |
Karthik Seemakurthy, Petra Bosilj, Erchan Aptoula, Charles W. Fox |
University of Lincoln,Sabanci University |
Object Detection II |
| GNN-Based Point Cloud Maps Feature Extraction and Residual Feature Fusion for 3D Object Detection |
Wei-Hsiang Liao, Chieh-Chih (Bob) Wang, Wen-chieh Lin |
National Yang Ming Chiao Tung University |
Object Detection and Segmentation |
| Self-Supervised Learning of Object Segmentation from Unlabeled RGB-D Videos |
Shiyang Lu, Yunfu Deng, Abdeslam Boularias, Kostas E. Bekris |
Rutgers University,Shenzhen Institutes of Advanced Technology, Chinese Academy of S,Rutgers, the State University of New Jersey |
Object Detection and Segmentation |
| Depth Is All You Need for Monocular 3D Detection |
Dennis Park, Jie Li, Dian Chen, Vitor Guizilini, Adrien Gaidon |
Toyota Research Institute |
Object Detection and Segmentation |
| Towards Visual Classification under Class Ambiguity |
Viktor Kozák, Jan Mikula, Lukáš Bertl, Karel Kosnar, Libor Přeučil |
Faculty of Electrical Engineering – Czech Technical University in Prague,Czech Technical University in Prague,Czech Technical University in Prague, CIIRC |
Object Detection and Segmentation |
| LidarAugment: Searching for Scalable 3D LiDAR Data Augmentations |
Zhaoqi Leng, Guowang Li, Chenxi Liu, Ekin Cubuk, Pei Sun, Tong He, Dragomir Anguelov, Mingxing Tan |
Waymo LLC,Waymo,Google,Waymo Research |
Object Detection and Segmentation |
| HFT: Lifting Perspective Representations Via Hybrid Feature Transformation for BEV Perception |
Jiayu Zou, Zheng Zhu, Junjie Huang, Tian Yang, Guan Huang, Xingang Wang |
Institute of Automation, Chinese Academy of Sciences,Phigent Robotics,PhiGent Robotics,Research Center of Precision Sensing and Control, Institute of A |
Object Detection and Segmentation |
| Radar Velocity Transformer: Single-Scan Moving Object Segmentation in Noisy Radar Point Clouds |
Matthias Zeller, Vardeep Singh Sandhu, Benedikt Mersch, Jens Behley, Michael Heidingsfeld, Cyrill Stachniss |
CARIAD SE,University of Bonn, CARIAD,University of Bonn |
Object Detection and Segmentation |
| CurveFormer: 3D Lane Detection by Curve Propagation with Curve Queries and Attention |
Yifeng Bai, Zhirong Chen, Zhangjie Fu, Lang Peng, Pengpeng Liang, Erkang Cheng |
University of Science and Technology of China,Nullmax,Southeast university,Zhengzhou University,Nullmax Inc |
Object Detection and Segmentation |
| Distributional Instance Segmentation: Modeling Uncertainty and High Confidence Predictions with Latent-MaskRCNN |
YuXuan (Andrew) Liu, Nikhil Mishra, Pieter Abbeel, Xi Chen |
Covariant.ai, UC Berkeley,UC Berkeley,covariant.ai,UC Berkeley,Embodied Intelligence, UC Berkeley |
Object Detection and Segmentation |
| Bayesian Inference of Fog Visibility from LiDAR Point Clouds and Correlation with Probabilities of Detection |
Karl Montalban, Christophe Reymann, Dinesh Atchuthan, Paul-Édouard Dupouy, Nicolas Riviere, Simon Lacroix |
easymile,EASYMILE SAS,EasyMile,ONERA,LAAS/CNRS |
Object Detection and Segmentation |
| GDIP: Gated Differentiable Image Processing for Object Detection in Adverse Conditions |
Sanket Kalwar, Dhruv Patel, Aakash Aanegola, Krishna Konda, Sourav Garg, Madhava Krishna |
International Institute of Information Technology, Hyderabad,International Institute of Information Technology, Hyderabad, In,ZF TCI,Queensland University of Technology,IIIT Hyderabad |
Object Detection and Segmentation |
| Sample, Crop, Track: Self-Supervised Mobile 3D Object Detection for Urban Driving LiDAR |
Sangyun Shin, Stuart Golodetz, Madhu Vankadari, Zhou Kaichen, Andrew Markham, Niki Trigoni |
University of Oxford,Oxford University |
Object Detection and Segmentation |
| Topology Matching of Branched Deformable Linear Objects |
Manuel Zürn, Markus Wnuk, Armin Lechler, Alexander Verl |
Institute for control engineering of machine tools and manufactu,University Stuttgart,University of Stuttgart |
Perception of Deformable Objects |
| DLOFTBs – Fast Tracking of Deformable Linear Objects with B-Splines |
Piotr Kicki, Amadeusz Szymko, Krzysztof Walas |
Poznan University of Technology |
Perception of Deformable Objects |
| Self-Supervised Cloth Reconstruction Via Action-Conditioned Cloth Tracking |
Zixuan Huang, Xingyu Lin, David Held |
University of Michigan,Carnegie Mellon University |
Perception of Deformable Objects |
| Learning to Estimate 3-D States of Deformable Linear Objects from Single-Frame Occluded Point Clouds |
Kangchen Lv, Mingrui Yu, Yifan Pu, Xin Jiang, Gao Huang, Xiang Li |
Tsinghua University,Beijing Academy of Artificial Intelligence |
Perception of Deformable Objects |
| Feature Extraction for Effective and Efficient Deep Reinforcement Learning on Real Robotic Platforms |
Peter Bohm, Pauline Pounds, Archie Chapman |
The University of Queensland |
Reinforcement Learning I |
| Online Safety Property Collection and Refinement for Safe Deep Reinforcement Learning in Mapless Navigation |
Luca Marzari, Enrico Marchesini, Alessandro Farinelli |
University of Verona,Northeastern University |
Reinforcement Learning I |
| Learning to View: Decision Transformers for Active Object Detection |
Wenhao Ding, Nathalie Majcherczyk, Mohit Deshpande, Xuewei Qi, Ding Zhao, Rajasimman Madhivanan, Arnab Sen |
Carnegie Mellon University,Amazon LLC,Amazon Lab,Toyota North America R&D Labs,Carnegie mellon university,Amazon.com,Amazon |
Reinforcement Learning I |
| Deep Reinforcement Learning for Autonomous Driving Using High-Level Heterogeneous Graph Representations |
Maximilian Schier, Christoph Reinders, Bodo Rosenhahn |
Leibniz Universität Hannover,Leibniz University Hanover,Institute of Information Processing, Leibniz Universität Hannove |
Reinforcement Learning I |
| Learning on the Job: Self-Rewarding Offline-To-Online Finetuning for Industrial Insertion of Novel Connectors from Vision |
Ashvin Nair, Brian Zhu, Gokul Narayanan, Eugen Solowjow, Sergey Levine |
UC Berkeley,University of California, Berkeley; Siemens,Worcester Polytechnic Institute,Siemens Corporation |
Reinforcement Learning I |
| Multi-Alpha Soft Actor-Critic: Overcoming Stochastic Biases in Maximum Entropy Reinforcement Learning |
Conor Igoe, Swapnil Pande, Siddarth Venkatraman, Jeff Schneider |
Carnegie Mellon University,Manipal Institute of Technology |
Reinforcement Learning I |
| Zero-Shot Policy Transfer with Disentangled Task Representation of Meta-Reinforcement Learning |
Zheng Wu, Yichen Xie, Wenzhao Lian, Changhao Wang, Yanjiang Guo, Jianyu Chen, Stefan Schaal, Masayoshi Tomizuka |
University of California, Berkeley,Google X,Tsinghua university,Tsinghua University,University of California |
Reinforcement Learning I |
| Real World Offline Reinforcement Learning with Realistic Data Source |
Gaoyue Zhou, Liyiming Ke, Siddhartha Srinivasa, Abhinav Gupta, Aravind Rajeswaran, Vikash Kumar |
Carnegie Mellon University,University of Washington,Meta AI |
Reinforcement Learning I |
| Robotic Table Wiping Via Reinforcement Learning and Whole-Body Trajectory Optimization |
Thomas Lew, Sumeet Singh, Mario Prats, Jeffrey Bingham, Jonathan Weisz, Benjie Holson, Xiaohan Zhang, Vikas Sindhwani, Yao Lu, Fei Xia, Peng Xu, Tingnan Zhang, Jie Tan, Montse Gonzalez Arenas |
Stanford University,Google,X,Everyday Robots,Binghamton University,Google Brain, NYC,Google Inc |
Reinforcement Learning I |
| Towards True Lossless Sparse Communication in Multi-Agent Systems |
Seth Karten, Mycal Tucker, Siva Kailas, Katia Sycara |
Carnegie Mellon University,Massachusetts Institute of Technology |
Reinforcement Learning I |
| Adaptive Risk-Tendency: Nano Drone Navigation in Cluttered Environments with Distributional Reinforcement Learning |
Cheng Liu, Erik-jan Van Kampen, Guido De Croon |
Delft University of Technology,TU Delft |
Reinforcement Learning I |
| Self-Adaptive Driving in Nonstationary Environments through Conjectural Online Lookahead Adaptation |
Tao Li, Haozhe Lei, Quanyan Zhu |
New York University |
Reinforcement Learning I |
| Sim-To-Real Policy and Reward Transfer with Adaptive Forward Dynamics Model |
Rongshun Juan, Hao Ju, Jie Huang, Randy Gomez, Keisuke Nakamura, Guangliang Li |
Tianjin University,Ocean University of China,Honda Research Institute Japan Co., Ltd. |
Transfer Learning |
| Safety-Constrained Policy Transfer with Successor Features |
Zeyu Feng, Bowen Zhang, Jianxin Bi, Harold Soh |
National University of Singapore |
Transfer Learning |
| GNM: A General Navigation Model to Drive Any Robot |
Dhruv Shah, Ajay Sridhar, Arjun Bhorkar, Noriaki Hirose, Sergey Levine |
University of California, Berkeley,UC Berkeley,UC Berkeley / TOYOTA Motor North America |
Transfer Learning |
| ViPFormer: Efficient Vision-And-Pointcloud Transformer for Unsupervised Pointcloud Understanding |
Hongyu Sun, Yongcai Wang, Xudong Cai, Xuewei Bai, Deying Li |
Renmin University of China |
Transfer Learning |
| Learning Exploration Strategies to Solve Real-World Marble Runs |
Alisa Allaire, Christopher Atkeson |
Carnegie Mellon University,CMU |
Learning Methods |
| Multi-Embodiment Legged Robot Control As a Sequence Modeling Problem |
Chen Yu, Weinan Zhang, Hang Lai, Zheng Tian, Laurent Kneip, Jun Wang |
ShanghaiTech University,Shanghai Jiao Tong University,University College London |
Learning Methods |
| Efficient Recovery Learning Using Model Predictive Meta-Reasoning |
Shivam Vats, Maxim Likhachev, Oliver Kroemer |
Carnegie Mellon University |
Learning Methods |
| Multi-Swarm Genetic Gray Wolf Optimizer with Embedded Autoencoders for High-Dimensional Expensive Problems |
Jing Bi, Jiahui Zhai, Haitao Yuan, Ziqi Wang, Junfei Qiao, Jia Zhang, Mengchu Zhou |
Beijing University of Technology, Beijing , China,Beijing University of Technology,Beihang University,Southern Methodist University,New Jersey Institute of Technology |
Learning Methods |
| H-SAUR: Hypothesize, Simulate, Act, Update, and Repeat for Understanding Object Articulations from Interactions |
Kei Ota, Hsiao-yu Tung, Kevin Smith, Anoop Cherian, Tim K. Marks, Alan Sullivan, Asako Kanezaki, Joshua Tenenbaum |
Tokyo Institute of Technology,CMU,Massachusetts Institute of Technology,Mitsubishi Electric Research Labs,Mitsubishi Electric Research Laboratories (MERL),Mitsubishi Electric Research Lab |
Learning Methods |
| Self-Supervised Learning of Action Affordances As Interaction Modes |
Liquan Wang, Nikita Dvornik, Rafael Dubeau, Mayank Mittal, Animesh Garg |
University of Toronto,Samsung,ETH Zurich |
Learning Methods |
| LATTE: LAnguage Trajectory TransformEr |
Arthur Fender Coelho Bucker, Luis Felipe Cruz Figueredo, Sami Haddadin, Ashish Kapoor, Shuang Ma, Sai Vemprala, Rogerio Bonatti |
Carnegie Mellon University,Technical University of Munich (TUM),Technical University of Munich,MicroSoft,Microsoft,Microsoft Corporation |
Learning Methods |
| Learning Visual Locomotion with Cross-Modal Supervision |
Antonio Loquercio, Ashish Kumar, Jitendra Malik |
UC Berkeley |
Learning Methods |
| MMIC-I: A Robotic Platform for Assembly Integration and Internal Locomotion through Mechanical Meta-Material Structures |
Olivia Irene Formoso, Greenfield Trinh, Damiana Catanoso, In-won Park, Christine Gregg, Kenneth C. Cheung |
NASA Ames Research Center,National Aeronautics and Space Administration (NASA) |
Novel Actuation and Actuators |
| Flow-Based Rendezvous and Docking for Marine Modular Robots in Gyre-Like Environments |
Gedaliah Knizhnik, Peihan Li, Mark Yim, M. Ani Hsieh |
RRAI, University of Pennsylvania,Drexel University,University of Pennsylvania |
Novel Actuation and Actuators |
| Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media |
Jason Lim, Florian Richter, Dimitri Schreiber, Peter Gavrilov, Lizzie Peiros, Mingwei Yeoh, Calvin Joyce, Sara Wickenhiser, Michael Yip |
University of Nevada, Reno,University of California, San Diego,University of California,University of California San Diego |
Novel Actuation and Actuators |
| TJ-FlyingFish: Design and Implementation of an Aerial-Aquatic Quadrotor with Tiltable Propulsion Units |
Xuchen Liu, Minghao Dou, Dongyue Huang, Songqun Gao, Ruixin Yan, Biao Wang, Jinqiang Cui, Qinyuan Ren, Lihua Dou, Zhi Gao, Jie Chen, Ben M. Chen |
The Chinese University of Hong Kong,Chinese University of Hong Kong,Nanjing University of Aeronautics and Astronautics,Peng Cheng Laboratory,Zhejiang University,Beijing Institue of Technology,Wuhan University,Tongji University |
Novel Actuation and Actuators |
| Modular Multi-Axis Elastic Actuator with Torque Sensing Capable P-CFH for Highly Impact Resistive Robot Leg |
Youngrae Kim, Sunghyun Choi, Jinhyeok Song, Dongwon Yun |
Daegu Gyeongbuk Institute of Science and Technology (DGIST), Dae,Daegu Gyeongbuk Institute of Science & Technology,DGIST,Daegu Gyeongbuk Institute of Science and Technology (DGIST) |
Novel Actuation and Actuators |
| Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion |
Hoi Man Lam, Jared Walker, Lucas Jonasch, Dimitri Schreiber, Michael Yip |
University of California San Diego,University of California,University of California, San Diego |
Novel Actuation and Actuators |
| Twist Snake: Plastic Table-Top Cable-Driven Robotic Arm with All Motors Located at the Base Link |
Kazutoshi Tanaka, Masashi Hamaya |
OMRON SINIC X Corporation |
Novel Actuation and Actuators |
| Strained Elastic Surfaces with Adjustable-Modulus Edges (SESAMEs) for Soft Robotic Actuation |
Christopher Kimmer, Michael Seokyoung Han, Cindy Harnett |
Indiana University Southeast,University of Louisville |
Novel Actuation and Actuators |
| Controllable Mechanical-Domain Energy Accumulators |
Sung Kim, David Braun |
Vanderbilt University |
Compliant Joints and Mechanisms |
| Concept Design of a New XY Compliant Parallel Manipulator with Spatial Configuration |
Zekui Lyu, Qingsong Xu |
University of Macau |
Compliant Joints and Mechanisms |
| Computational Design of 3D-Printable Compliant Mechanisms with Bio-Inspired Sliding Joints |
Felipe Velasquez, Bernhard Thomaszewski, Stelian Coros |
ETH Zurich,Université de Montréal |
Compliant Joints and Mechanisms |
| Compliant Finger Joint with Controlled Variable Stiffness Based on Twisted Strings Actuation |
Mihai Dragusanu, Danilo Troisi, Domenico Prattichizzo, Monica Malvezzi |
University of Siena |
Compliant Joints and Mechanisms |
| Design of a Variable Stiffness Spring with Human-Selectable Stiffness |
Chase Mathews, David Braun |
Vanderbilt University |
Compliant Joints and Mechanisms |
| Novel Spring Mechanism Enables Iterative Energy Accumulation under Force and Deformation Constraints |
Cole Dempsey, David Braun |
Vanderbilt University |
Compliant Joints and Mechanisms |
| Fast, Reliable Constrained Manipulation Using a VSA Driven Planar Robot |
Andrew Bernhard, Joseph Schimmels |
Argonne National Laboratory,Marquette University |
Compliant Joints and Mechanisms |
| A Stiffness-Changeable Soft Finger Based on Chain Mail Jamming |
Zhengtao Hu, Abdullah Ahmed, Weiwei Wan, Tetsuyou Watanabe, Kensuke Harada |
Osaka University,Kanazawa University |
Compliant Joints and Mechanisms |
| Repetitive Twisting Durability of Synthetic Fiber Ropes |
Shinya Sadachika, Masahito Kanekiyo, Hiroyuki Nabae, Gen Endo |
Tokyo Institute of Technology |
Mechanism Design |
| Computational Design of Closed-Chain Linkages: Hopping Robot Driven by Morphological Computation |
Kirill Nasonov, Dmitriy Ivolga, Ivan Borisov, Sergey Kolyubin |
ITMO University,ITMO |
Mechanism Design |
| Trajectory Planning Issues in Cuspidal Commercial Robots |
Durgesh Haribhau Salunkhe, Damien Chablat, Philippe Wenger |
CNRS-UMR,-CD,-LS,N,Laboratoire des Sciences du Numérique de Nantes,Ecole Centrale de Nantes - CNRS |
Mechanism Design |
| Big Data Approach for Synthesizing a Spatial Linkage Mechanism |
Neung Hwan Yim, Jegyeong Ryu, Yoon Young Kim |
Seoul National University,Korea Institute of Science and Technology |
Mechanism Design |
| Croche-Matic: A Robot for Crocheting 3D Cylindrical Geometry |
Gabriella Perry, Jose Luis Garcia Del Castillo Y Lopez, Nathan Melenbrink |
Harvard University |
Mechanism Design |
| A Novel Platform to Control Biofouling in Pearl Oysters Cultivation |
Van-nhan Tran, Quan-dung Pham, Tan-sang Ha, Wong Yue Him, Sai-kit Yeung |
Hong Kong University of Science and Technology,Shenzhen University |
Mechanism Design |
| Embedded Active Stiffening Mechanisms to Modulate Kresling Tower Kinetostatic Properties |
John Berre, Lennart Rubbert, Francois Geiskopf, Pierre Renaud |
INSA Strasbourg, University of Strasbourg, CNRS,INSA - Strasbourg,INSA de Strasbourg,ICube |
Mechanism Design |
| A Compact, Two-Part Torsion Spring Architecture |
Zachary Bons, Gray Thomas, Luke Mooney, Elliott Rouse |
University of Michigan,Dephy, Inc. |
Award Finalists 1 |
| HREyes: Design, Development, and Evaluation of a Novel Method for AUVs to Communicate Information and Gaze Direction |
Michael Fulton, Aditya Prabhu, Junaed Sattar |
University of Minnesota,University of Minnesota, Twin Cities |
Human-Robot Collaboration I |
| Dense Depth Completion Based on Multi-Scale Confidence and Self-Attention Mechanism for Intestinal Endoscopy |
Ruyu Liu, Zhengzhe Liu, Haoyu Zhang, Guodao Zhang, Zhigui Zuo, Weiguo Sheng |
Hangzhou Normal University,Hangzhou Dianzi University,the First Affiliated Hospital of Wenzhou Medical University |
Human-Robot Collaboration I |
| Design of an Energy-Aware Cartesian Impedance Controller for Collaborative Disassembly |
Sebastian Hjorth, Edoardo Lamon, Dimitrios Chrysostomou, Arash Ajoudani |
Aalborg University,Istituto Italiano di Tecnologia |
Human-Robot Collaboration I |
| Towards Robots That Influence Humans Over Long-Term Interaction |
Shahabedin Sagheb, Ye-ji Mun, Neema Ahmadian, Benjamin Christie, Andrea Bajcsy, Katherine Driggs-Campbell, Dylan Losey |
Virginia Tech,University of Illinois at Urbana-Champaign,University of California Berkeley |
Human-Robot Collaboration I |
| Carrying the Uncarriable: A Deformation-Agnostic and Human-Cooperative Framework for Unwieldy Objects Using Multiple Robots |
Doganay Sirintuna, Idil Özdamar, Arash Ajoudani |
|
|

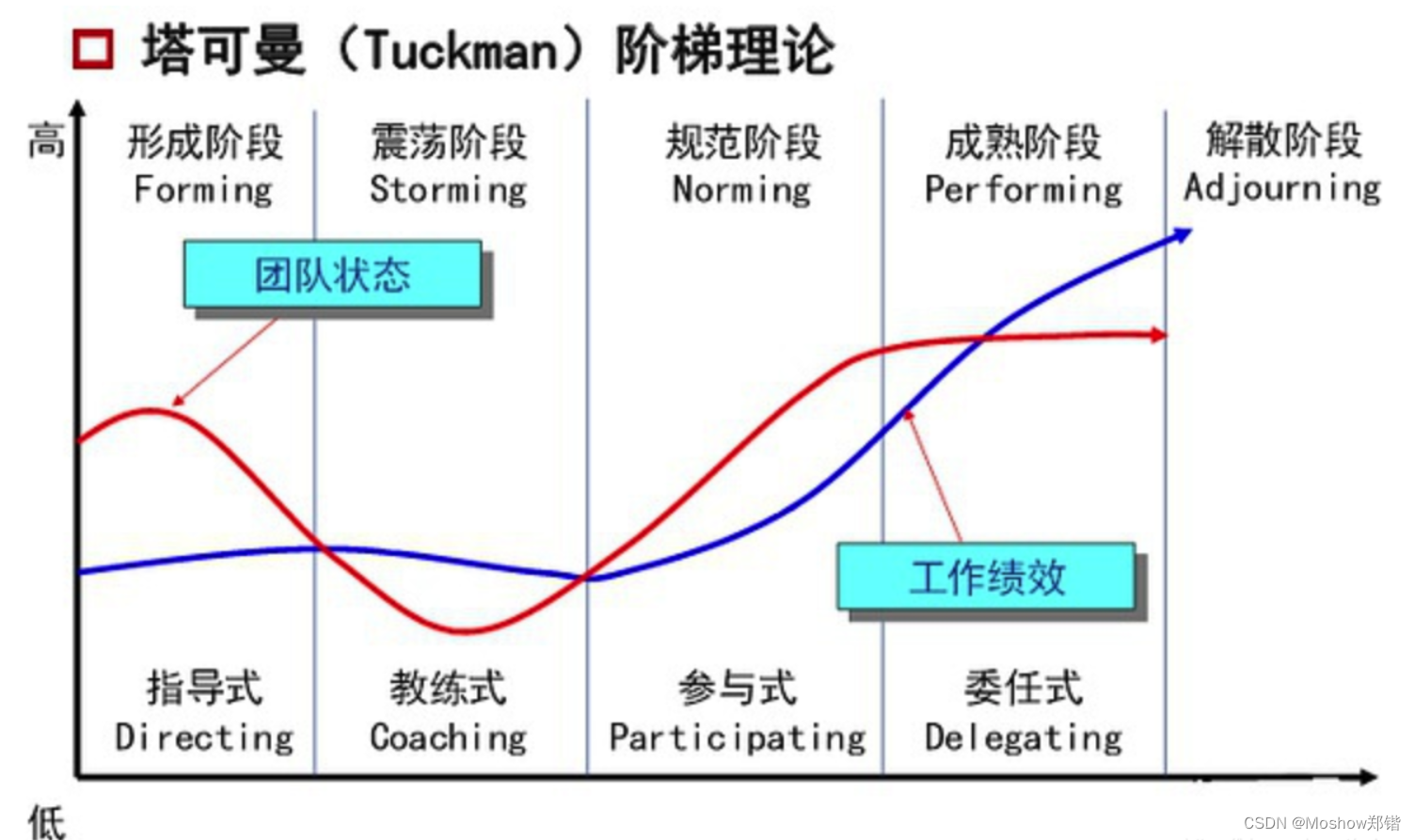




























![[BJDCTF2020]----EzPHP](https://img-blog.csdnimg.cn/direct/64d0fb647ef54a78a7b0eca3049ad617.png)