ORB-SLAM3复现(ubuntu18/20)
文章目录
1 坐标系与外参Intrinsic parameters
世界坐标系:Z轴指向重力矢量的相反方向,在纯视觉情况下,世界系设置为第一个相 机的姿态。
相机坐标系:采用常见的右下前(xyz)顺序。这里 C 1 C_1 C1即左目
cam0, C 2 C_2 C2即右目cam1。IMU坐标系:也即Body坐标系

- 相机与
body系转换
T W C 1 = T W B T B C 1 T W C 2 = T W B T B C 1 T C 1 C 2 \begin{aligned}&\mathbf{T}_{\mathsf{WC}_1}=\mathbf{T}_{\mathsf{WB}}\mathbf{T}_{\mathsf{BC}_1}\\&\mathbf{T}_{\mathsf{WC}_2}=\mathbf{T}_{\mathsf{WB}}\mathbf{T}_{\mathsf{BC}_1}\mathbf{T}_{\mathsf{C}_1\mathsf{C}_2}\end{aligned} TWC1=TWBTBC1TWC2=TWBTBC1TC1C2
- 校准文件需要提供的外部参数有 T B C 1 T_{BC1} TBC1和 T C 1 C 2 T_{C_1C_2} TC1C2,以双目
EuRoC.yaml为例
Stereo.T_c1_c2: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [0.999997256477797,-0.002317135723275,-0.000343393120620,0.110074137800478,
0.002312067192432,0.999898048507103,-0.014090668452683,-0.000156612054392,
0.000376008102320,0.014089835846691,0.999900662638081,0.000889382785432,
0,0,0,1.000000000000000]
# Transformation from camera 0 to body-frame (imu)
# 注意,如果是仅双目情况,只估计了左目位姿
IMU.T_b_c1: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [0.0148655429818, -0.999880929698, 0.00414029679422, -0.0216401454975,
0.999557249008, 0.0149672133247, 0.025715529948, -0.064676986768,
-0.0257744366974, 0.00375618835797, 0.999660727178, 0.00981073058949,
0.0, 0.0, 0.0, 1.0]
2 内参Intrinsic parameters
注意,有的双目相机提供的是相机基线b,有的直接提供的 T C 1 C 2 T_{C_1C_2} TC1C2。
这是因为当相机提供的是矫正过的立体图像时,意味着相机制造商或数据集已经对相机之间的畸变进行了矫正。在这种情况下,畸变已经被移除,相机图像上的点的位置更加准确。因此,在标定文件中,只需要提供基线 b,而不需要提供完整的 T C 1 C 2 T_{C_1C_2} TC1C2。

2.1 相机内参
① 针孔模型Pinhole
最常见的针孔模型,一般提供 the camera focal length and central point in pixe。以EuRoC.yaml为例
Camera.type: "PinHole"
# Camera calibration and distortion parameters (OpenCV)
Camera1.fx: 458.654
Camera1.fy: 457.296
Camera1.cx: 367.215
Camera1.cy: 248.375
Camera1.k1: -0.28340811
Camera1.k2: 0.07395907
Camera1.p1: 0.00019359
Camera1.p2: 1.76187114e-05
ORB系统会使用OpenCV的stereorectify函数对左右图像进行内部矫正
② KannalaBrandt8模型
一种用于描述广角和鱼眼相机镜头畸变的数学模型,Kannala-Brandt模型的8参数版本通常称为KannalaBrandt8,其中8个参数用于建模相机的畸变。对于KannalaBrandt8相机,由于其本身广角特性,不会进行内部矫正以避免失去分辨率和视场
以RealSense_T265.yaml为例
Camera.type: "KannalaBrandt8"
# Left Camera calibration and distortion parameters (OpenCV)
Camera1.fx: 284.9501953125
Camera1.fy: 285.115295410156
Camera1.cx: 420.500213623047
Camera1.cy: 400.738098144531
# Kannala-Brandt distortion parameters
Camera1.k1: -0.00530046410858631
Camera1.k2: 0.0423333682119846
Camera1.k3: -0.03949885815382
Camera1.k4: 0.00682387687265873
③ Rectified相机
这个模型适用于哪些已经去除畸变的数据,所以只需要 ( f x , f y , c x , c y ) (f_x,f_y,c_x,c_y) (fx,fy,cx,cy)和相机基线b。以RealSense_D435i.yaml为例
Camera.type: "Rectified"
# Rectified Camera calibration (OpenCV)
Camera1.fx: 382.613
Camera1.fy: 382.613
Camera1.cx: 320.183
Camera1.cy: 236.455
Stereo.b: 0.0499585
2.2 IMU内参
测量值 = 理想值 + 高斯噪声 + 偏差。注意,IMU测量的角速度和加速度都是在IMU坐标系下。
a ~ = a + η a + b a ω ~ = ω + η g + b g \begin{aligned}\widetilde{\mathbf{a}}=&\mathbf{a}+\eta^a+\mathbf{b}^a\\\widetilde{\boldsymbol{\omega}}=&\mathbf{\omega}+\eta^g+\mathbf{b}^g\end{aligned} a
=ω
=a+ηa+baω+ηg+bg
噪声
η a ∼ N ( 0 , σ a 2 I 3 ) η g ∼ N ( 0 , σ g 2 I 3 ) \begin{aligned}&\eta^a\sim\mathcal{N}(\mathbf{0},\sigma_a^2\mathbf{I}_3)\\&\eta^g\sim\mathcal{N}(\mathbf{0},\sigma_g^2\mathbf{I}_3)\end{aligned} ηa∼N(0,σa2I3)ηg∼N(0,σg2I3)
σ a σ_a σa 和 σ g σ_g σg 是noise densities,IMU的数据手册中有详细说明,并且需要在标定文件中提供。
对于偏差
假设它们遵循布朗运动。给定两个连续时刻i和i + 1,其特征如下
b i + 1 a = b i a + η r w a with η r w a ∼ N ( 0 , σ a , r w 2 I 3 ) b i + 1 g = b i g + η r w g with η r w g ∼ N ( 0 , σ g , r w 2 I 3 ) \begin{aligned}\mathbf{b}_{i+1}^a&=\mathbf{b}_i^a+\boldsymbol{\eta}_\mathrm{rw}^a&&\text{with }\boldsymbol{\eta}_\mathrm{rw}^a\sim\mathcal{N}(\mathbf{0},\sigma_{a,rw}^2\mathbf{I}_3)\\\mathbf{b}_{i+1}^g&=\mathbf{b}_i^g+\boldsymbol{\eta}_\mathrm{rw}^g&&\text{with }\boldsymbol{\eta}_\mathrm{rw}^g\sim\mathcal{N}(\mathbf{0},\sigma_{g,rw}^2\mathbf{I}_3)\end{aligned} bi+1abi+1g=bia+ηrwa=big+ηrwgwith ηrwa∼N(0,σa,rw2I3)with ηrwg∼N(0,σg,rw2I3)
通常,将IMU制造商提供的随机游走标准差增加(比如乘以10)是一种常见做法,以考虑未建模的效应并提高IMU初始化的收敛性。
以EuRoC.yaml为例(这里提供的是连续/离散,没有说,后面再看)
# IMU noise
IMU.NoiseGyro: 1.7e-04 # 1.6968e-04 σ_g
IMU.NoiseAcc: 2.0e-03 # 2.0000e-3 σ_a
IMU.GyroWalk: 1.9393e-05
IMU.AccWalk: 3.e-03 # 3.0000e-3
IMU.Frequency: 200.0
以TUM-VI.yaml为例(连续时间下的方差单位)
# IMU noise (Use those from VINS-mono)
IMU.NoiseGyro: 0.00016 # 0.004 (VINS) # 0.00016 (TUM) # 0.00016 # rad/s^0.5
IMU.NoiseAcc: 0.0028 # 0.04 (VINS) # 0.0028 (TUM) # 0.0028 # m/s^1.5
IMU.GyroWalk: 0.000022 # 0.000022 (VINS and TUM) rad/s^1.5
IMU.AccWalk: 0.00086 # 0.0004 (VINS) # 0.00086 # 0.00086 # m/s^2.5
IMU.Frequency: 200.0
关于单位可参考高博新书P54页。
3 VI标定—外参
ORB给的文档Calibration_Tutorial,使用工具 Kalibr,后续有时间单独把这块上传
3.1 Visual calibration
视觉内参
3.2 Inertial calibration
cam-imu外参标定
4 编译
ORB-SLAM3有好几个版本,这里下载了v1.0
4.1 c++编译报错(ubuntu18/20)
# 依次编译各种库
echo "Building ROS nodes"
cd Examples/ROS/ORB_SLAM3
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make -j
Ubuntu18因为常见会报错的库已经被包含在包里,所以c++编译基本没报错。
4.1.1 报错1
ps:在ubuntu20中安装源码中第三方库sophus报错,sophus
/usr/include/eigen3/Eigen/src/Core/IO.h:122:39: error: ‘digits10’ is not a member of ‘Eigen::NumTraits<ceres::Jet<double, 3> >’ 122 | return NumTraits<Scalar>::digits10(); | ~~~~~~~~~~~~~~~~~~~~~~~~~~~^~
打开package.yaml发现版本太低了,在其CMakeLists.txt中也是支持的是c++11
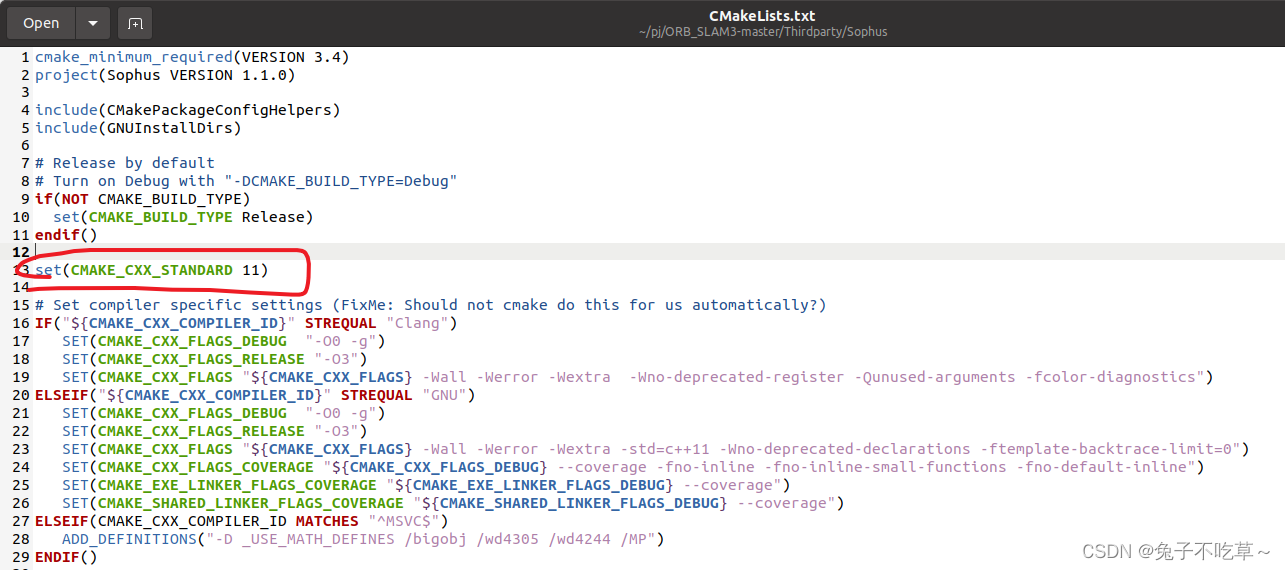
问题的本质是sophus库版本和eigen不适配,首先尝试更换sophus库版本。这里用1.22.4替换了源码中的包

4.1.2 报错2:c++11问题
解决了上面问题,开始编译主程序
报错2:ubuntu20支持c++14
error: ‘slots_reference’ was not declared in this scope
1180 | cow_copy_type<list_type, Lockable> ref = slots_reference();
这个应该是很常见的问题,在cmakelists中把c++11改成c++14即可
4.1.3 报错3:‘cout’ is not a member of ‘std’
报错3:
#include <iostream>丢了?ImuTypes.h添加即可,以及GeometricTools.h
ORB_SLAM3-master/include/ImuTypes.h:203:14: error: ‘cout’ is not a member of ‘std’
203 | std::cout << "pint meas:\n";
| ^~~~
/home/pj/pj/ORB_SLAM3-master/include/ImuTypes.h:33:1: note: ‘std::cout’ is defined in header ‘<iostream>’; did you forget to ‘#include <iostream>’?
32 | #include "SerializationUtils.h"
+++ |+#include <iostream>
33 |
/home/pj/pj/ORB_SLAM3-master/include/ImuTypes.h:204:23: warning: comparison of integer expressions of different signedness: ‘int’ and ‘std::vector<ORB_SLAM3::IMU::Preintegrated::integrable>::size_type’ {aka ‘long unsigned int’} [-Wsign-compare]
204 | for(int i=0; i<mvMeasurements.size(); i++){
| ~^~~~~~~~~~~~~~~~~~~~~~
/home/pj/pj/ORB_SLAM3-master/include/ImuTypes.h:205:18: error: ‘cout’ is not a member of ‘std’
205 | std::cout << "meas " << mvMeasurements[i].t << std::endl;
| ^~~~
/home/pj/pj/ORB_SLAM3-master/include/ImuTypes.h:205:18: note: ‘std::cout’ is defined in header ‘<iostream>’; did you forget to ‘#include <iostream>’?
/home/pj/pj/ORB_SLAM3-master/include/ImuTypes.h:207:14: error: ‘cout’ is not a member of ‘std’
207 | std::cout << "end pint meas:\n";
4.1.4 报错4:chrono::monotonic_clock
报错4:
monotonic_clock is replaced by steady_clock after C++11,所以C++14不支持monotonic_clock
error: ‘std::chrono::monotonic_clock’ has not been declared
201 | std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();

看了代码之后发现,作者已经提前写明了可能会出现的问题,
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
全部改为steady_clock,
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
// Pass the image to the SLAM system
SLAM.TrackMonocular(im,tframe);
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
4.1.5 报错5:fmt
报错5:fmt问题
ibORB_SLAM3.so: undefined reference to `fmt::v6::internal::error_handler::on_error(char const*)'
/usr/bin/ld: ../lib/libORB_SLAM3.so: undefined reference to `fmt::v6::vprint(fmt::v6::basic_string_view<char>, fmt::v6::format_args)'
/usr/bin/ld: ../lib/libORB_SLAM3.so: undefined reference to `std::locale fmt::v6::internal::locale_ref::get<std::locale>() const'
collect2: error: ld returned 1 exit status
make[2]: *** [CMakeFiles/rgbd_tum.dir/build.make:124: ../Examples/RGB-D/rgbd_tum] Error 1
make[1]: *** [CMakeFiles/Makefile2:120: CMakeFiles/rgbd_tum.dir/all] Error
sudo apt install libfmt-dev
find_package(fmt REQUIRED)
target_link_libraries(xxx fmt::fmt) # 添加fmt库
4.1.6 opencv版本警告
最后警告:
/usr/bin/ld: warning: libopencv_core.so.4.2, needed by ../Thirdparty/DBoW2/lib/libDBoW2.so, may conflict with libopencv_core.so.3.4。看起来貌似词袋库需要的opencv库与实际版本不一样?但是之前一直都是3.4.16

测试单目kitti没有问题,这个警告暂时忽略

4.2 ROS编译报错
4.2.1 报错1
还是需要把功能包加入到ros路径,参考ORB-SLAM2中报错
gedit ~/.bashrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM3/Examples/ROS
chmod +x build_ros.sh
./build_ros.sh
4.2.2 报错2
cmake对应的一些警告
CMake Deprecation Warning at /opt/ros/melodic/share/ros/core/rosbuild/rosbuild.cmake:7 (cmake_policy):
The OLD behavior for policy CMP0011 will be removed from a future version
of CMake.
The cmake-policies(7) manual explains that the OLD behaviors of all
policies are deprecated and that a policy should be set to OLD only under
specific short-term circumstances. Projects should be ported to the NEW
behavior and not rely on setting a policy to OLD.
Call Stack (most recent call first):
CMakeLists.txt:2 (include)
.....
# 这里其实不用管,只是一些警告
4.2.3 报错3
关于sophus相应redefinition的错误,这些错误可能是由 Sophus 库的头文件重复引入导致的。之前安装sophus时候安装到系统里面了,这里ORB3又自带了相应的文件,可是每个头文件里面已经加上了预编译指令或#pragma once
/usr/local/include/sophus/common.hpp:174:8: error: redefinition of ‘struct Sophus::Constants<float>’ struct Constants<float>
随机打开头文件查看,对于sophus库的引用,一个指明了ORB-SLAM3第三方库下的文件,一个没有指明,估计是这里引发的问题。c++里面引用自定义头文件和标准头文件格式不一样,一个用“”,另一个用括号<>。OBR-SLAM3里面关于sophus的引用比较混乱,有时候用“”,有时候又<>.

// GeometricTools.h
#include <opencv2/core/core.hpp>
#include <sophus/se3.hpp>
// ORBmatcher.h 对于自定义的引用,改成
#include"sophus/sim3.hpp"
"Thirdparty/Sophus/sophus/sim3.hpp" // 没有什么好的办法,都换为第三方库下面的,估计是两个sophus版本不一样引起
估计报错提到的文件都有这个问题,修改完之后重新编译下c++版本,再编译ROS版本的

4.2.4 报错4
/home/wheeltec-client/WPJ/ORB_SLAM3-master/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc: In member function ‘ORB_SLAM3::Plane* ORB_SLAM3::ViewerAR::DetectPlane(cv::Mat, const std::vector<ORB_SLAM3::MapPoint*>&, int)’: /home/wheeltec-client/WPJ/ORB_SLAM3-master/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:405:53: error: no matching function for call to ‘std::vector<cv::Mat>::push_back(Eigen::Vector3f)’ vPoints.push_back(pMP->GetWorldPos()); ^
报错显示:在ViewerAR.cc文件中类型不匹配错误,把Mat类型和Eigen::Vector3f混淆
/home/wheeltec-client/WPJ/ORB_SLAM3-master/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:530:42: error: conversion from ‘Eigen::Vector3f {aka Eigen::Matrix<float, 3, 1>}’ to non-scalar type ‘cv::Mat’ requested cv::Mat Xw = pMP->GetWorldPos(); ~~~~~~~~~~~~~~~~^~
/home/wheeltec-client/WPJ/ORB_SLAM3-master/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc:151:41: error: conversion from ‘Sophus::SE3f {aka Sophus::SE3<float>}’ to non-scalar type ‘cv::Mat’ requested cv::Mat Tcw = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec()); ~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
ros_mono_ar.cc文件
^[[ACMakeFiles/MonoAR.dir/build.make:198: recipe for target 'CMakeFiles/MonoAR.dir/src/AR/ViewerAR.cc.o' failed
make[2]: *** [CMakeFiles/MonoAR.dir/src/AR/ViewerAR.cc.o] Error 1
make[2]: *** 正在等待未完成的任务....
CMakeFiles/MonoAR.dir/build.make:118: recipe for target 'CMakeFiles/MonoAR.dir/src/AR/ros_mono_ar.cc.o' failed
// 解决办法 ViewerAR.cc ros_mono_ar.cc 添加对应头文件
#include"../../../include/Converter.h"
// 在这两个文件相应的位置修改下面的代码
//in line 151 of ros_mono_ar.cc
cv::Mat Tcw=ORB_SLAM3::Converter::toCvMat(mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec()).matrix());
//in line 405 of ViewerAR.cc
vPoints.push_back(ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos()));
//in line 530 of ViewerAR.cc
cv::Mat Xw = ORB_SLAM3::Converter::toCvMat(pMP->GetWorldPos());
4.3 CMakeLists.txt
c++
find_package(OpenCV REQUIRED) # 注意把对应版本换为你自己版本,或者让编译器自己去找
find_package(Eigen3 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(realsense2)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
-lboost_serialization # 链接到Boost库中的serialization模块
-lcrypto # 链接到OpenSSL库中
)
ROS
cmake_minimum_required(VERSION 2.4.6)
include($ENV{ROS_ROOT}/core/rosbuild/rosbuild.cmake)
rosbuild_init()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/../../../cmake_modules)
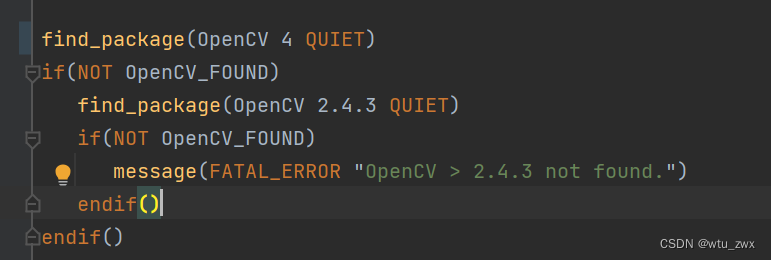
find_package(OpenCV QUIET)
find_package(Eigen3 REQUIRED)
find_package(Pangolin REQUIRED)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/../../../
${PROJECT_SOURCE_DIR}/../../../include
${PROJECT_SOURCE_DIR}/../../../include/CameraModels
${Pangolin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
)
set(LIBS # 这里没有引入sophus库,直接把libORB_SLAM3.so拿了过来
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM3.so
-lboost_system
)
# Node for monocular camera
rosbuild_add_executable(Mono
src/ros_mono.cc
)
target_link_libraries(Mono
${LIBS}
)
5 c++运行测试
两个数据集的IMU都是连续时间下噪声参数,Euroc是针孔相机,TUM是鱼眼相机
5.1 Euroc数据集测试
# 数据,每个数据下都有对应的配置参数
└── mav0
├── cam0
│ └── data
│ └── sensor.yaml
├── cam1
│ └── data
├── imu0
├── leica0
└── state_groundtruth_estimate0
5.1.1 单目 + IMU
运行单目 和 单目+惯性的除了可执行文件命令是一致的
# 可执行文件 字典 配置文件 数据总路径(程序自己找imu和cam) 时间戳
./Examples/Monocular-Inertial/mono_inertial_euroc
Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml /mnt/hgfs/dataset/EUROC/MH_05_difficult ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH05.txt #orb带了

5.1.2 双目
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /mnt/hgfs/dataset/EUROC/MH_05_difficult Examples/Stereo/EuRoC_TimeStamps/MH05.txt

5.1.3 双目 + IMU
./Examples/Stereo-Inertial/stereo_inertial_euroc Vocabulary/ORBvoc.txt ./Examples/Stereo-Inertial/EuRoC.yaml /mnt/hgfs/dataset/EUROC/MH_05_difficult ./Examples/Stereo-Inertial/EuRoC_TimeStamps/MH05.txt
这里没有运行成功
There are 1 cameras in the atlas
Camera 0 is pinhole
not IMU meas
not IMU meas
not enough acceleration
not enough acceleration
not enough acceleration
First KF:0; Map init KF:0
New Map created with 145 points
start VIBA 1
end VIBA 1
Not enough motion for initializing. Reseting...
5.2 TUM-VI数据集
TUM-VI dataset :两个鱼眼镜头和一个惯性传感器.这里IMU的噪声参数代码中声明参考了VINS-mono。
下载的数据集没有带配置参数,但是官网提供了相应的相机校准文件和IMU标定参数。
# IMU noise (Use those from VINS-mono)
IMU.NoiseGyro: 0.00016 # rad/s^0.5
IMU.NoiseAcc: 0.0028 # m/s^1.5
IMU.GyroWalk: 0.000022 # rad/s^1.5
IMU.AccWalk: 0.00086 # m/s^2.5
IMU.Frequency: 200.0
5.2.1 单目+IMU
# 可执行文件 字典 配置文件 图像路径 时间戳 imu路径 保存轨迹名
"Usage: ./mono_inertial_tum_vi path_to_vocabulary path_to_settings path_to_image_folder_1 path_to_times_file_1 path_to_imu_data_1 (trajectory_file_name)
# 作者已经把imu数据、时间戳放到下载的代码里了
./Examples/Monocular-Inertial/mono_inertial_tum_vi Vocabulary/ORBvoc.txt Examples/Monocular-Inertial/TUM-VI.yaml /mnt/hgfs/dataset/TUM/VIO/zip文件/dataset-corridor1_512_16/mav0/cam0/data Examples/Monocular-Inertial/TUM_TimeStamps/dataset-corridor1_512.txt Examples/Monocular-Inertial/TUM_IMU/dataset-corridor1_512.txt

5.2.2 双目 + IMU
# 可执行文件 字典 配置文件 cam0 cam1 时间戳 imu数据
./Examples/Stereo-Inertial/stereo_inertial_tum_vi Vocabulary/ORBvoc.txt Examples/Stereo-Inertial/TUM-VI.yaml /mnt/hgfs/dataset/TUM/VIO/zip文件/dataset-corridor1_512_16/mav0/cam0/data /mnt/hgfs/dataset/TUM/VIO/zip文件/dataset-corridor1_512_16/mav0/cam1/data Examples/Stereo-Inertial/TUM_TimeStamps/dataset-corridor1_512.txt Examples/Stereo-Inertial/TUM_IMU/dataset-corridor1_512.txt